一种工件输送及翻转装置的制作方法
1.本实用新型涉及工件翻转技术领域,尤其是指一种工件输送及翻转装置。
背景技术:
2.近年来,在工件的加工过程中,经常需要对工件进行翻转,以便于对工件的两面分别进行加工,工件翻转设备广泛应用于喷涂、印刷及零部件生产等行业。在申请号为201920626350.7、专利名称为一种门板自动喷漆翻转机构的实用新型专利中公开了:一种门板自动喷漆翻转机构,该门板自动喷漆翻转机构包括工装架、翻转驱动机构以及翻转固定机构,所述工装架包括框架以及门板固定机构,所述门板固定机构与框架转动连接,所述门板固定机构用于对门板进行固定,所述翻转驱动机构用于驱动门板固定机构进行翻转,所述翻转固定机构用于对门板固定机构进行固定。此申请中缺少用于带动门板自动上下料的输送装置,门板需要手动上下料,门板翻转的效率低,工人的劳动强度大,翻转机构的自动化程度低。因此,缺陷十分明显,亟需提供一种解决方案。
技术实现要素:
3.为了解决上述技术问题,本实用新型的目的在于提供一种工件输送及翻转装置。
4.为了实现上述目的,本实用新型采用如下技术方案:
5.一种工件输送及翻转装置,其包括输送机构、限位机构、夹持机构、升降机构及翻转机构;翻转机构与升降机构的升降端连接,夹持机构与翻转机构的翻转端连接,限位机构设置于输送机构并位于夹持机构的一侧,夹持机构活动设置于输送机构的上方,所述输送机构用于输送工件,所述限位机构用于对输送机构输送过来的工件进行限位或定位,所述夹持机构用于对限位机构定位后的工件进行夹持。
6.进一步地,所述输送机构包括间隔设置的两个立板、分别转动设置于两个立板的两个滚轮组件及用于带动两个滚轮组件分别相对于两个立板转动的输送驱动器。
7.进一步地,所述限位机构包括位于两个立板之间的限位座、设置于限位座上的限位驱动器及位于限位驱动器的输出端的限位件。
8.进一步地,所述升降机构包括升降支座、设置于升降支座上的升降驱动器及设置于升降驱动器的输出端的升降座,所述升降座与升降支座滑动连接,所述翻转机构装设于升降座上。
9.进一步地,所述夹持机构包括夹持组件及连接于翻转机构的翻转端的夹持座,所述夹持组件包括设置于夹持座上的夹持驱动器及设置于夹持驱动器的输出端的夹爪。
10.进一步地,所述夹持组件的数量设置为多个,所述夹持座的投影试图呈凵形,多个夹持组件分别容置于夹持座的中空空间内。
11.进一步地,所述升降机构还包括设置于立板上的避让槽,所述避让槽的数量设置为多个,所述夹爪能贯穿避让槽并突伸至两个滚轮组件之间。
12.进一步地,所述滚轮组件包括多个转动设置于立板上的滚动轮。
13.进一步地,所述翻转机构采用翻转气缸。
14.本实用新型的有益效果:本实用新型的结构紧凑、工件翻转的步骤简单、翻转效率快;增设限位机构,提高了夹持机构夹持工件时的位置精度,有利于夹持机构稳定地夹取输送机构上输送的工件。升降机构和夹持机构配合带动工件上升,以避免翻转中的工件与输送机构抵触,同时升降机构和夹持机构能将翻转后的工件放置于输送机构上,再经由输送机构将翻转后的工件直接输送至下一工位,简化了工件输送结构及步骤,提高了本实用新型的自动化程度。
附图说明
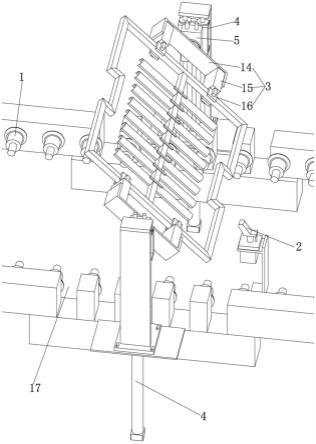
15.图1为本实用新型的工件翻转状态下的立体结构示意图。
16.图2为本实用新型的夹持工件时的立体结构示意图。
17.附图标记说明:
18.1、输送机构;2、限位机构;3、夹持机构;4、升降机构;5、翻转机构;6、立板;7、滚轮组件;8、限位座;9、限位驱动器;10、限位件;11、升降支座;12、升降驱动器;13、升降座;14、夹持座;15、夹持驱动器;16、夹爪;17、避让槽。
具体实施方式
19.为了便于本领域技术人员的理解,下面结合实施例与附图对本实用新型作进一步的说明,实施方式提及的内容并非对本实用新型的限定。
20.如图1至图2所示,本实用新型提供的一种工件输送及翻转装置,其包括输送机构1、限位机构2、夹持机构3、升降机构4及翻转机构5,翻转机构5与升降机构4的升降端连接,夹持机构3与翻转机构5的翻转端连接,限位机构2设置于输送机构1并位于夹持机构3的一侧,夹持机构3活动设置于输送机构1的上方,所述输送机构1用于输送工件,所述限位机构2用于对输送机构1输送过来的工件进行限位或定位,所述夹持机构3用于对限位机构2定位后的工件进行夹持,所述升降机构4用于带动翻转机构5、夹持机构3及夹持的工件上升,所述翻转机构5用于带动上升后的夹持机构3及其夹持的工件进行翻转,所述输送机构1能继续输送翻转后的工件至下一工位。
21.在实际使用过程中,人工或机械手将多个工件正面朝上地依序放置于输送机构1上,通过输送机构1有序地对工件进行输送,输送机构1将工件输送至限位机构2的工作端后停止运动,限位机构2能对位于其输出端的工件进行限位或定位;然后通过夹持机构3夹持住定位后的工件,通过升降机构4带动翻转机构5、夹持机构3及工件向上运动,以避免工件在翻转的过程中与输送机构1产生抵触或干涉,直至上升高度大于工件翻转所需的空间后停止上升;再通过翻转机构5带动夹持机构3及工件转动,直至工件翻转至反面朝上,然后升降机构4带动翻转机构5、夹持机构3及工件向下复位,直至工件反面朝上地放置于输送机构1上,夹持机构3松开对工件的夹持、限位机构2取消对工件的限制或定位,输送机构1启动,输送机构1继续输送此翻转后的工件至下一工位并能继续输送待翻转的工件至限位机构2的工作端等待翻转。本实用新型的结构紧凑、工件翻转的步骤简单、翻转效率快;增设限位机构2,提高了夹持机构3夹持工件时的位置精度,有利于夹持机构3稳定地夹取输送机构1上输送的工件。升降机构4和夹持机构3配合带动工件上升,以避免翻转中的工件与输送机
构1抵触,同时升降机构4和夹持机构3配合工作以将翻转后的工件放置于输送机构1上,再经由输送机构1将翻转后的工件直接输送至下一工位,简化了工件输送结构及步骤,提高了本实用新型的自动化程度。
22.进一步地,所述输送机构1包括间隔设置的两个立板6、分别转动设置于两个立板6上的两个滚轮组件7及用于带动两个滚轮组件7分别相对于两个立板6同步转动的输送驱动器(图中未示出)。
23.具体地,两个所述滚轮组件7位于两个立板6之间。在实际使用过程中,通过输送驱动器同步带动两个滚轮组件7转动,通过转动的滚轮组件7将工件输送至限位机构2限位并等待翻转,转动的滚轮组件7还能将翻转后的工件输送至下一工位。输送机构1的机构简单,生产和安装方便。在两个滚轮组件7对工件进行输送的过程中,两个立板6对工件起到导向和限位的作用,避免工件在输送过程中发生左右方向的位置偏移,提高了输送工件的稳定性。
24.进一步地,所述限位机构2包括位于两个立板6之间的限位座8、设置于限位座8上的限位驱动器9及位于限位驱动器9的输出端的限位件10。
25.具体地,所述限位座8、限位驱动器9和限位件10从下至上依次设置;所述限位件10在竖直方向上的高度低于滚轮组件7在竖直方向上的高度,所述限位驱动器9可采用气缸或直线电机;所述限位驱动器9用于带动限位件10沿竖直方向升降,以使得限位件10在竖直方向上的高度高于滚轮组件7的高度,以便于限位件10对滚轮组件7上所输送的工件进行阻挡。限位机构2对工件的限位方便,限位机构2与输送机构1分别独立安装,限位机构2与输送机构1的安装方便快捷。
26.进一步地,所述升降机构4包括升降支座11、设置于升降支座11上的升降驱动器12及设置于升降驱动器12的输出端的升降座13,所述升降座13与升降支座11滑动连接,所述翻转机构5装设于升降座13上。
27.具体地,所述升降驱动器12可采用气缸或直线电机,所述升降驱动器12用于带动升降座13相对于升降支座11沿竖直方向升降;所述夹持机构3装设于翻转机构5的翻转端;所述升降机构4、夹持机构3和翻转机构5组成一个翻转结构,所述翻转结构的数量设置为两个,两个翻转结构的所述升降支座11分别与两个立板6连接。在实际使用过程中,通过升降驱动器12带动升降座13、翻转机构5、夹持机构3和工件相对于升降支座11沿竖直方向做升降运动,以带动将工件向靠近或远离输送机构1。通过立板6两侧的两个夹持机构3分别夹持工件的两端,提高了工件翻转和升降过程中的稳定性。升降座13与升降支座11滑动连接,进一步提高了工件升降过程中的精准度和稳定性。
28.如图1所示,进一步地,所述夹持机构3包括夹持组件及连接于翻转机构5的翻转端的夹持座14,所述夹持组件包括设置于夹持座14上的夹持驱动器15及设置于夹持驱动器15的输出端的夹爪16。
29.具体地,所述夹持组件的数量设置为多个,所述夹持座14的俯视投影试图呈凵形,便于多个夹持组件分别容置于夹持座14的中空空间内;优选地,所述夹持座14上的夹持组件的数量设置为两个;所述夹持组件可采用现有的夹爪气缸,其结构和功能与现有的夹爪气缸相同或相似,在此不再赘述;所述升降机构4还包括设置于立板6上的避让槽17,所述避让槽17的数量设置为多个,所述滚轮组件7包括多个转动设置于立板6上的滚动轮,每个所
述避让槽17位于相邻的两个滚动轮之间;所述夹爪16能贯穿避让槽17并突伸至两个滚轮组件7之间。在实际使用过程中,当夹爪16位于避让槽17内并处于张开状态时,通过限位机构2对一工件进行限位,此时,此工件正好位于夹爪16的抓取范围内,通过夹持驱动器15带动夹爪16闭合以抓取此工件。夹持机构3的夹持方便,增设避让槽17,便于夹爪16突伸至两个滚轮组件7之间直接夹取工件,工件的夹取方便快捷。
30.具体地,所述翻转机构5可采用现有的翻转气缸,其结构与功能与现有的翻转气缸的结构和功能相同或相似,在此不再赘述。
31.本实施例中的所有技术特征均可根据实际需要而进行自由组合。
32.上述实施例为本实用新型较佳的实现方案,除此之外,本实用新型还可以其它方式实现,在不脱离本技术方案构思的前提下任何显而易见的替换均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1