一种机械化自动码垛机行走装置的制作方法
1.本实用新型属于码垛机技术领域,具体涉及一种机械化自动码垛机行走装置。
背景技术:
2.耐火材料一般分为两种,即不定型耐火材料和定型耐火材料。不定型耐火材料也叫浇注料,是由多种骨料或集料和一种或多种粘和剂组成的混合粉状颗料,使用时必须和一种或多种液体配合搅拌均匀,具有较强的流动性,定型耐火材料一般指耐火砖,其形状有标准规则,也可以根据需要筑切时临时加工,通常耐火砖加工出厂时多数采用自动化码垛机进行码垛工作。
3.码垛机是将已装入容器的纸箱,按一定排列码放在托盘、栈板(木质、塑胶)上,进行自动堆码,可堆码多层,然后推出,便于叉车运至仓库储存,本设备采用plc+触摸屏控制,实现智能化操作管理,简便、易掌握,可大大地减少劳动力和降低劳动强度,码垛机是输送机输送来的料袋、纸箱或是其它包装材料按照客户工艺要求的工作方式自动堆叠成垛,并将成垛的物料进行输送的设备。
4.对比专利文件公开号为:“cn114313731a一种机械化自动码垛机行走装置包括码垛机,码垛机的底部设置有支撑架,码垛机通过支撑架安装在地面上,支撑架包括安装在地面上的滑轨,滑轨内滑动设置有滑块,码垛机安装在滑块上,该机械化自动码垛机行走装置,码垛机安装在安装板上,通过转动杆可带动码垛机进行转动,从而使得码垛机在复位的过程中,可对另一流水线进行码垛,从而提高了工作效率,安装板上设置有弹簧,安装板通过弹簧与缓冲板之间弹性连接,码垛机安装在缓冲板上,通过设置弹簧,可在码垛机进行安装时对其进行减震缓冲,从而对转动杆进行保护”但是在其实际使用情况下任然存在以下问题:目前码垛机多数采用皮带式或丝杆的方式进行移动,此种行走方式不仅维护成本高,而且对于工作人员而言日常保养起来较为困难,易出现移动路线受灰尘以及杂质的影响,从而造成移动受阻且卡死的情况。
5.因此,需要一种机械化自动码垛机行走装置,解决现有技术中存在的对码垛机行走效果不佳以及移动方式受限较大的问题。
技术实现要素:
6.本实用新型的目的在于提供一种机械化自动码垛机行走装置,以解决上述背景技术中提出的问题。
7.为实现上述目的,本实用新型提供如下技术方案:一种机械化自动码垛机行走装置,包括码垛机本体,所述码垛机本体还包括:
8.安装架,所述安装架设置有两个,两个所述安装架呈对称分布固定于所述码垛机本体底端侧壁,所述安装架底端侧壁固定有两个呈对称分布的导向轮,所述码垛机本体正下方设置有两个呈对称分布的导轨,所述导向轮与所述导轨内侧相适配,所述码垛机本体外侧设置有两个呈对称分布的清扫组件,所述清扫组件与所述导轨相适配。
9.方案中需要说明的是,所述清扫组件包括:
10.装载架,所述装载架固定于所述码垛机本体一侧侧壁,所述装载架一侧侧壁固定有两个呈对称分布的支架,所述支架内侧侧壁固定有转动座,两个所述转动座相邻的一侧侧壁共同转动连接有转轴,所述转轴外表面紧固套接有两个呈对称分布的不完全齿轮,所述不完全齿轮啮合连接有齿形环,所述齿形环与所述支架内侧滑动连接,所述齿形环底端侧壁固定有海绵板,所述海绵板与所述导轨顶面相接触;
11.第一轴承座,所述第一轴承座设置有两个,两个所述第一轴承座呈对称分布固定于码垛机本体底端侧壁,两个所述第一轴承座内部共同转动连接从动轴,所述从动轴与所述转轴之间设置有两个锥齿轮,两个所述锥齿轮相互啮合连接,所述码垛机本体底端侧壁固定有两个呈对称分布的第二轴承座,两个所述第二轴承座内部共同转动连接有主动轴;
12.支撑架,所述支撑架固定于所述码垛机本体一侧侧壁,所述支撑架底端侧壁固定有伺服电机,所述伺服电机的输出轴一端与所述主动轴同轴固定,所述主动轴外表面紧固套接有蜗杆,所述从动轴外表面紧固套接有蜗轮,所述蜗杆与所述蜗轮啮合连接。
13.进一步值得说明的是,所述齿形环顶端与底端侧壁均固定有加装板,所述加装板一侧与所述支架外侧滑动连接,所述加装板的宽度值大于所述齿形环的宽度值。
14.更进一步需要说明的是,所述装载架与所述支架之间固定有两个呈对称分布的加强杆,所述加强杆与所述装载架之间呈倾斜分布设置。
15.作为一种优选的实施方式,支撑架横截面呈l形设置,所述支撑架与所述码垛机本体之间的夹角呈直角状设置。
16.作为一种优选的实施方式,所述码垛机本体正下方设置有多个呈等距分布的承载板,所述承载板顶端侧壁与两个所述导轨底端侧壁固定。
17.与现有技术相比,本实用新型提供的一种机械化自动码垛机行走装置,至少包括如下有益效果:
18.(1)通过导向轮与导轨相适配,不仅便于移动码垛机本体,而且还能够通过移动码垛机本体的位置,从而实现对不同位置的物体进行码垛工作,适用范围较广,相比于传统的传送带式以及丝杆式的移动方式而言,本装置日常维护成本更低,使用寿命更强。
19.(2)通过清扫组件的设置,能够对码垛机本体移动路径上的导轨进行清扫,从而能够有效避免出现因导轨处灰尘以及杂质堆积影响码垛机本体的移动情况,更进一步的提升码垛机本体移动过程中的稳定效果,降低因灰尘堆积造成码垛机本体移动不便或卡死的情况,对于工作人员而言无需日常维护手动清扫的步骤、更加省时省力。
附图说明
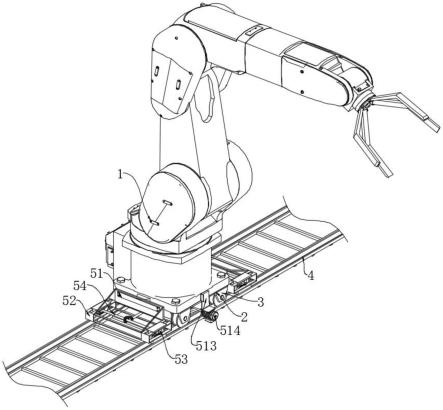
20.图1为本实用新型的整体结构示意图;
21.图2为本实用新型的局部仰视结构示意图;
22.图3为图2中a区域结构放大示意图;
23.图4为图2中b区域结构放大示意图。
24.图中:1、码垛机本体;2、安装架;3、导向轮;4、导轨;5、清扫组件;51、装载架;52、支架;53、转动座;54、转轴;55、不完全齿轮;56、齿形环;57、海绵板;58、第一轴承座;59、从动轴;510、锥齿轮;511、第二轴承座;512、主动轴;513、支撑架;514、伺服电机;515、蜗杆;516、
蜗轮;6、加装板;7、加强杆;8、承载板。
具体实施方式
25.下面结合实施例对本实用新型做进一步的描述。
26.请参阅图1-4,本实用新型提供一种机械化自动码垛机行走装置,包括码垛机本体1,码垛机本体1还包括安装架2,安装架2设置有两个,两个安装架2呈对称分布固定于码垛机本体1底端侧壁,安装架2底端侧壁固定有两个呈对称分布的导向轮3,码垛机本体1正下方设置有两个呈对称分布的导轨4,导向轮3与导轨4内侧相适配,码垛机本体1外侧设置有两个呈对称分布的清扫组件5,清扫组件5与导轨4相适配,通过导向轮3与导轨4相适配,不仅便于移动码垛机本体1,而且还能够通过移动码垛机本体1的位置,从而实现对不同位置的物体进行码垛工作,适用范围较广,相比于传统的传送带式以及丝杆式的移动方式而言,本装置日常维护成本更低,使用寿命更强。
27.进一步地如图1、图2、图3和图4所示,值得具体说明的是,清扫组件5包括装载架51,装载架51固定于码垛机本体1一侧侧壁,装载架51一侧侧壁固定有两个呈对称分布的支架52,支架52内侧侧壁固定有转动座53,两个转动座53相邻的一侧侧壁共同转动连接有转轴54,转轴54外表面紧固套接有两个呈对称分布的不完全齿轮55,不完全齿轮55啮合连接有齿形环56,齿形环56与支架52内侧滑动连接,齿形环56底端侧壁固定有海绵板57,海绵板57与导轨4顶面相接触;第一轴承座58,第一轴承座58设置有两个,两个第一轴承座58呈对称分布固定于码垛机本体1底端侧壁,两个第一轴承座58内部共同转动连接从动轴59,从动轴59与转轴54之间设置有两个锥齿轮510,两个锥齿轮510相互啮合连接,码垛机本体1底端侧壁固定有两个呈对称分布的第二轴承座511,两个第二轴承座511内部共同转动连接有主动轴512;支撑架513,支撑架513固定于码垛机本体1一侧侧壁,支撑架513底端侧壁固定有伺服电机514,伺服电机514的输出轴一端与主动轴512同轴固定,主动轴512外表面紧固套接有蜗杆515,从动轴59外表面紧固套接有蜗轮516,蜗杆515与蜗轮516啮合连接,通过清扫组件5的设置,能够对码垛机本体1移动路径上的导轨4进行清扫,从而能够有效避免出现因导轨4处灰尘以及杂质堆积影响码垛机本体1的移动情况,更进一步的提升码垛机本体1移动过程中的稳定效果,降低因灰尘堆积造成码垛机本体1移动不便或卡死的情况,对于工作人员而言无需日常维护手动清扫的步骤、更加省时省力。
28.进一步地如图4所示,值得具体说明的是,齿形环56顶端与底端侧壁均固定有加装板6,加装板6一侧与支架52外侧滑动连接,加装板6的宽度值大于齿形环56的宽度值,通过加装板6的设置,不仅能够提升齿形环56在移动时的稳定性,而且还能够有效确保齿形环56在移动时的流畅性。
29.本方案具备以下工作过程:需对码垛机本体1进行移动时,通过推动码垛机本体1配合导向轮3的设置,使得导向轮3沿导轨4内进行水平移动,直至将码垛机本体1移动至指定工作位置即可,需对导轨4处进行清扫提升码垛机本体1移动稳定性时,通过伺服电机514的驱动,使得主动轴512同步转动,带动蜗杆515同步转动,利用蜗杆515与蜗轮516啮合传动作用,使得从动轴59同步转动,利用锥齿轮510啮合传动作用,使得转轴54同步转动,带动不完全齿轮55同步转动,利用不完全齿轮55与齿形环56之间的啮合传动作用,使得齿形环56受力后沿支架52内侧进行往复移动,从而带动海绵板57同步进行移动,能够对导轨4处的灰
尘以及杂质进行清扫。
30.根据上述工作过程可知:通过导向轮3与导轨4相适配,不仅便于移动码垛机本体1,而且还能够通过移动码垛机本体1的位置,从而实现对不同位置的物体进行码垛工作,适用范围较广,相比于传统的传送带式以及丝杆式的移动方式而言,本装置日常维护成本更低,使用寿命更强并通过清扫组件5的设置,能够对码垛机本体1移动路径上的导轨4进行清扫,从而能够有效避免出现因导轨4处灰尘以及杂质堆积影响码垛机本体1的移动情况,更进一步的提升码垛机本体1移动过程中的稳定效果,降低因灰尘堆积造成码垛机本体1移动不便或卡死的情况,对于工作人员而言无需日常维护手动清扫的步骤、更加省时省力。
31.进一步地如图4所示,值得具体说明的是,装载架51与支架52之间固定有两个呈对称分布的加强杆7,加强杆7与装载架51之间呈倾斜分布设置,通过加强杆7的设置,不仅能够降低支架52产生的晃动,而且还能够有效提升装载架51的稳定性。
32.进一步地如图1所示,值得具体说明的是,支撑架513横截面呈l形设置,支撑架513与码垛机本体1之间的夹角呈直角状设置,通过支撑架513的设置,能够有效提升支撑架513与码垛机本体1之间的稳定性。
33.进一步地如图2所示,值得具体说明的是,码垛机本体1正下方设置有多个呈等距分布的承载板8,承载板8顶端侧壁与两个导轨4底端侧壁固定,通过承载板8的设置,能够有效为将导轨4处的重力进行分散受力,一定程度上提升导轨4的使用寿命。
34.综上:通过加强杆7的设置,不仅能够降低支架52产生的晃动,而且还能够有效提升装载架51的稳定性,并通过支撑架513的设置,能够有效提升支撑架513与码垛机本体1之间的稳定性,并通过承载板8的设置,能够有效为将导轨4处的重力进行分散受力,一定程度上提升导轨4的使用寿命。
35.伺服电机514和码垛机本体1均可采用市场购置,伺服电机514和码垛机本体1均配有电源,在本领域属于成熟技术,已充分公开,因此说明书中不重复赘述。
36.本技术文件中码垛机本体型号为:“er3100”,因此最新的现有技术中码垛机本体已是大家公知的一种现有产品。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1