本发明涉及对承载于输送台的货物的输送可否进行判定的输送可否判定装置、具备该输送可否判定装置的测距装置、具备该测距装置的输送单元、输送可否判定方法以及输送可否判定程序。
背景技术:
1、作为将承载于托盘那样的输送台的货物连同输送台一起提升并输送的输送装置,被广泛地使用叉车。
2、在叉车中,搭载有检测存在于周围的物体的物体检测装置(例如,参照专利文献1)。
3、在专利文献1中,物体检测装置通过对由立体摄像机拍摄到的图像进行处理,从而检测成为叉车的前进的妨碍的物体(例如,障碍物、墙壁等)的位置。为了避免与这样的物体的冲突,叉车的主控制器基于物体检测装置的检测结果进行减速处理。
4、现有技术文献
5、专利文献
6、专利文献1:日本特开2020-57258号公报
技术实现思路
1、发明要解决的课题
2、但是,根据图像处理,难以识别像输送台以及货物那样应由叉车输送的输送对象物。例如,输送台具有供叉插拔的接受部。但是,根据处理后的图像,难以将该接受部与赋予具有与输送台相似的外形的物体的形状或者图案进行区分而检测,其结果,存在无法识别输送对象物的情况。
3、因此,即使基于物体检测装置的检测结果能够执行与叉车的安全行驶关联的处理,也难以执行与叉车的输送关联的处理。
4、因此,本发明的目的在于通过提高从存在于输送装置的周围的物体识别输送对象物的精度来辅助输送装置的动作控制。
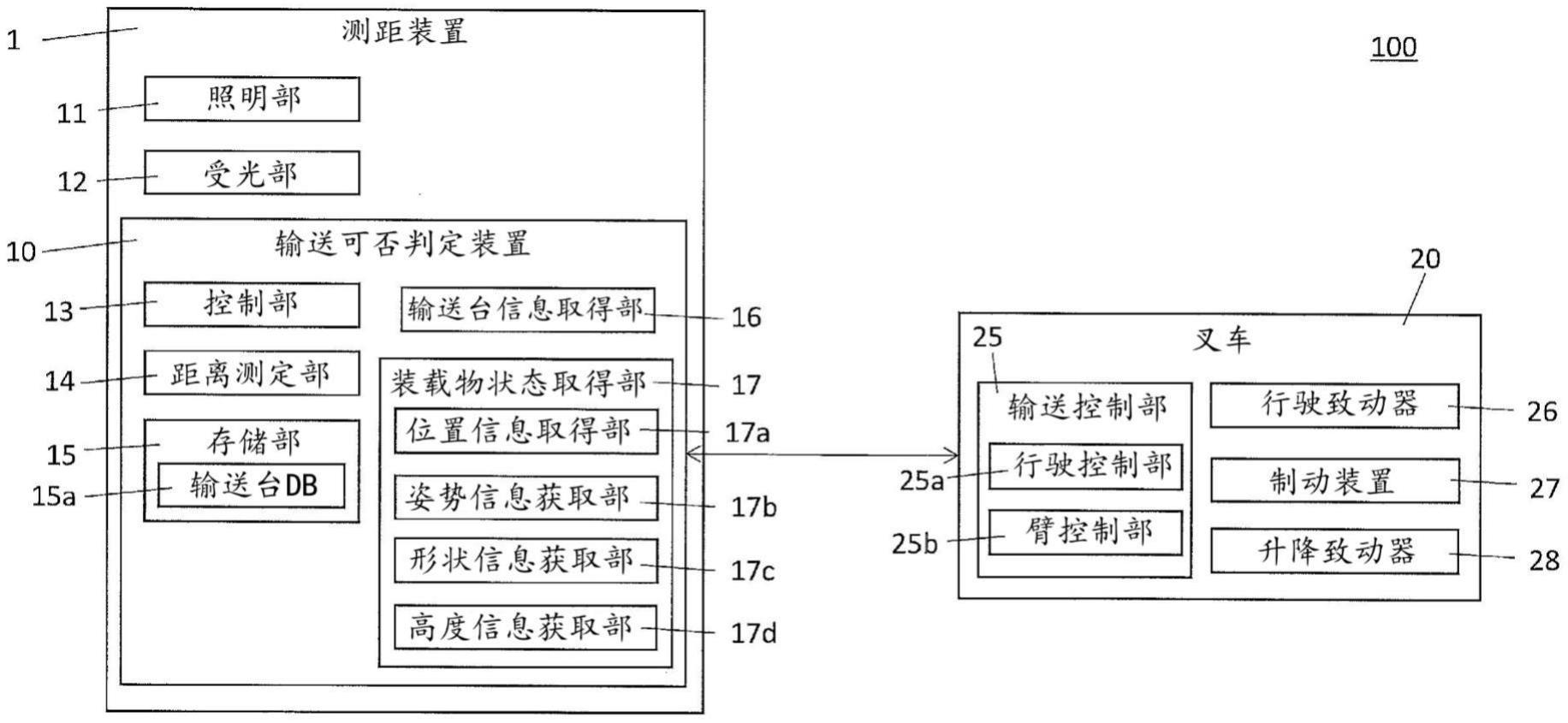
5、本发明的一个方式涉及的输送可否判定装置具备距离信息取得部、判定部以及条件判定部。距离信息取得部根据从照明装置向对象物照射的电磁波的反射量,取得到对象物的距离信息。判定部根据在距离信息取得部中取得的到对象物的距离信息,在对象物是承载了货物的输送台的情况下,判定该货物的状态。条件判定部基于在判定部中被判定的货物的状态,判定允许输送装置输送货物的条件即可输送条件的成立与否。
6、在此,输送装置保持输送台并使其升降。“输送”也包括不伴随输送台的水平移动的仅升降。输送装置包括具有使主体(车体)移动的动力源的自走式也包括不具有这样的动力源的非自走式。
7、非自走式的输送装置例如也可以构成为包括动力升降机、输送用机器人(机械手)等,并能进行手推。自走式的输送装置例如包括叉车等。自走式的输送装置包含由具有用于人类进行驾驶操作的部件(转向器、杆、踏板等)的有人式车辆构成的装置,另外,还包括自动输送机,该自动输送机由agv(automatic guided vehicle:自动导引车)、amr(autonomous mobile robot:自主移动机器人)那样即使人类不进行驾驶操作也能够行驶的自动驾驶车辆构成。
8、也就是说,例如,可以如臂部那样保持并升降输送台的机构被安装于有人式车辆的主体,也可以安装于无人式车辆的主体。
9、输送台是装载货物并通过输送装置与货物一起输送的装卸台,木制、树脂制等材料没有限制。输送台例如具有供叉车等输送装置的臂部件插入的孔、凹部等接受部。输送台例如包括平托盘、片材托盘等。
10、从照明装置照射的电磁波例如包括广义的光(紫外光/可见光/红外光)、波长比光短的γ(γ射线)线、x射线、波长比光长的微波、广播用的电波(短波长、中波、长波长)、超声波、弹性波、量子波等。
11、此外,距离信息取得部既可以是检测电磁波的反射而算出距离信息的构成,也可以是例如从设置为外部装置的距离传感器等取得距离信息的构成。
12、根据上述构成,参照与该电磁波的反射量相应的到对象物的距离信息。因此,容易区分设置于输送台的形状、与对具有与输送台类似的外形的物体赋予的形状或图案,输送对象物的识别精度得以提高。
13、另外,也能够基于到货物的距离信息和到输送台的距离信息,从输送对象物区别识别输送台和货物,另外,还能够判定装货物的状态。
14、条件判定部基于该货物的状态,判定可否进行基于输送装置的货物的输送。
15、由此,由于高精度地判定货物的状态,因此能够在判定为能够输送的情况下抑制发生输送中的货物塌陷等不良情况。
16、判定部也可以判定货物相对于输送台的相对位置作为货物的状态。在可输送条件中包括相对位置位于预定的基准区域内这样的位置条件。
17、根据上述结构,在货物相对于输送台的相对位置位于基准区域内时,允许基于输送装置的输送。相反,在货物偏向输送台被配置的情况下,输送被禁止。因此,操作员不需要监视相对位置,输送装置就能够稳定地输送货物。
18、判定部也可以判定货物相对于输送台的姿势作为货物的状态。在可输送条件中包括货物相对于输送台的姿势在预定的基准范围内这样的姿势条件。
19、根据上述结构,在货物相对于输送台的姿势处于基准范围内时,允许基于输送装置的输送。相反,在货物偏向输送台而被配置的情况下,输送被禁止。因此,操作员无需监视姿势,输送装置能够稳定地输送货物。
20、判定部也可以判定货物的形状作为货物的状态。在可输送条件中也可以包括货物的形状处于预定的基准范围内这样的形状条件。
21、根据上述结构,在货物的形状处于基准范围内时,允许基于输送装置的输送。相反,在货物的形状为设想范围外的形状的情况下,输送被禁止。因此,操作员无需监视形状,输送装置能够稳定地输送货物。
22、判定部也可以判定货物的高度作为货物的状态。在可输送条件中也可以包括高度为预定的基准高度以内这样的高度条件。
23、根据上述结构,在货物的高度为基准高度以内时,允许基于输送装置的输送。相反,在货物超过基准高度的情况下,输送被禁止。因此,操作员无需监视高度,输送装置能够稳定地输送货物。
24、判定部也可以根据距离信息来判定对象物是否是输送台。
25、根据上述结构,由于使用到测定对象物的距离信息来判定对象物是否是输送台,因此例如即使在放置于地面的对象物的侧面记载有黑色的图案等的情况下,也能够使用距离信息来检测有无由输送装置输送的输送台的特征(例如,供输送装置的臂部等插入的孔、凹部等的接受部)。其结果,能够准确地判定所检测的物体是否是输送台。
26、输送台也可以具有供输送装置的臂部件插入的接受部。判定部也可以使用距离信息,根据有无接受部、大小、位置中的至少一个,判定对象物是否是输送台。
27、在上述结构中,使用距离信息来检测接受部,判定部根据接受部的有无、大小、位置等的检测结果,判定对象物是否是输送台。由于接受部是输送台的主要特征部分之一,因此能够高精度地判定对象物是否是输送台。
28、输送台也可以具有供输送装置的臂部件插入的接受部。判定部也可以使用距离信息,根据接受部的有无、大小、位置中的至少一个,判定对象物是单独的输送台、承载了货物的输送台、输送台以外的物体中的哪一个。
29、如上所述,由于接受部是输送台的主要特征部分之一,因此,判定部能够根据接受部的有无、大小、位置等的检测结果,准确地判定输送台的状态(单质、有装载,不是输送台)。
30、判定部也可以使用距离信息来检测对象物被放置的地面,并将距离地面具有高度的物体检测为输送台的候补。
31、由此,能够基于被检测的距地面的高度,高精度地检测输送体的候选。
32、判定部也可以根据距离信息,针对被检测为输送台的候补的物体,设定其外形。
33、由于参照距离信息,因此能够准确地设定作为输送台的候补而检测到的物体的外形。
34、判定部也可以使用基于距离信息或拍摄对象物的图像的明暗信息而得到的二值化处理后的数据来设定外形。
35、由此,能够使用距离信息或者基于拍摄对象物的图像的明暗信息而得到的二值化处理后的数据来设定对象物的外形。
36、在判定部中未得到被进行了二值化处理的数据的情况下,也可以调整照射/接收从照明装置照射的电磁波的曝光时间。
37、由此,在未得到被进行了二值化处理的数据的情况下,通过调整照射/接收从照明装置照射的电磁波的曝光时间,从而能够得到适当被进行了二值化处理的数据,能够准确地设定对象物的外形。
38、判定部也可以基于被设定的外形来设定被设想为形成接受部的检测面。
39、由此,能够根据被设定的外形来设定认为有接受部的检测面。
40、判定部也可以根据检测面上的接受部的进深信息,判定是否是输送台。
41、由此,通过使用获取到的距离信息来检测检测面上有无进深,从而能够准确地判定对象物是否是具有接受部的输送台。
42、判定部也可以检测存在于与假定为输送台的物体的检测面相同的轴坐标上的货物的大致水平方向上的位置,判定货物的状态。
43、由此,通过检测存在于与设想为输送台的物体的检测面相同的轴坐标上的货物的大致水平方向上的位置,能够判定货物的位置、大小、偏移等状态。
44、判定部也可以检测相对于设想为输送台的物体的检测面的货物的朝向,来判定货物的状态。
45、由此,通过检测相对于被设想为输送台的物体的检测面的货物的朝向,从而能够判定相对于输送台的货物的朝向、偏移等状态。
46、由此,通过将判定为输送台的输送台的数据(外形、大小、接受部的位置等)注册在存储部中,例如,然后,能够识别输送台和载置于输送台上的货物的边界,判定装载货物的平衡等。
47、电磁波也可以是红外线。
48、由此,通过获取根据红外线的反射量而计算的距离信息,例如,即使在暗处实施输送作业的情况下,也能够准确地判断是否是输送台。
49、本发明的一方式所涉及的测距装置具备上述的输送可否判定装置、照明装置以及受光部。照明装置对对象物照射电磁波。受光部检测从照明装置照射的电磁波的反射量。
50、根据上述构成,受光部检测从照明装置照射的电磁波从对象物的反射,从而能够根据反射量计算(获取)到对象物的距离信息。因此,能够根据计算出的距离信息,准确地判断是否是输送台、货物的状态等。
51、测距装置也可以具备控制部,该控制部调整用于来自照明装置的电磁波的照射量以及受光部检测电磁波的反射量的曝光时间。
52、由此,通过由控制部调整曝光时间,从而能够根据到对象物的距离以适当的曝光时间照射电磁波并接收电磁波的反射。此外,通过为了得到被进行了二值化处理的数据而调整为适当的曝光时间,从而能够使用距离信息准确地判断是否是输送台、货物的状态等。
53、控制部也可以根据到对象物的距离来调整曝光时间。
54、由此,控制部例如在到对象物的距离近的情况下缩短曝光时间,在到对象物的距离远的情况下延长曝光时间,从而能够根据到对象物的距离以适当的曝光时间接收电磁波的照射/电磁波的反射。
55、本发明的一方式涉及的输送单元具备上述的测距装置和输送载置于输送台的货物的输送装置。
56、由此,能够构筑基于条件判定部的判定结果来判定允许还是禁止基于输送装置的动作的输送单元。
57、输送装置也可以具备插入输送台的接受部的臂部件、和控制臂部件的动作的输送控制部。如果在条件判定部中判定为可输送条件成立,则输送控制部也可以根据在判定部中被判定的货物的状态来控制臂部件的动作。
58、由此,在可输送条件成立时输送货物,在可输送条件不成立时不输送货物。在可输送条件成立时,根据货物的状态来控制臂部件的动作。因此,输送装置能够稳定地输送货物。
59、本发明的一个方式所涉及的输送可否判定方法具备距离信息获取步骤、判定步骤、以及输送可否判定步骤。在距离信息取得步骤中,根据从照明装置向对象物照射的电磁波的反射量,取得到对象物的距离信息。在判定步骤中,基于在距离信息取得步骤中取得的到对象物的距离信息,在对象物是承载了货物的输送台的情况下,判定该货物的状态。在输送可否判定步骤中,基于在判定步骤中被判定的货物的状态,判定允许输送装置输送货物的条件即可输送条件的成立与否。
60、本发明的一个方式所涉及的输送可否判定程序使计算机执行上述的输送可否判定方法。
61、上述方法以及程序具备与上述的输送可否判定装置的技术特征对应的技术的特征。
62、因此,在基于高精度地判定出的货物的状态被判定为能够输送的情况下,能够抑制输送中的货物塌陷等不良情况的发生。
63、(发明效果)
64、根据本发明,通过提高从存在于输送装置的周围的物体识别输送对象物的精度,从而能够支援输送装置的动作控制。