扶手和用于制造扶手的方法与流程
本发明涉及扶手和用于制造扶手方法。
背景技术:
1、扶手用于自动扶梯或自动人行道,以便为使用自动扶梯或自动人行道的人提供握持。自动扶梯和自动人行道的扶手通常是由橡胶或塑料制成的c形型材。根据规定,它们必须以自动扶梯级或自动人行道板的速度或最多快2%的速度运行,并且与引导件的最大间隙小于8mm。无论环境条件如何,考虑到数百万次的弯曲循环,扶手必须具有良好的拉伸性能、高抗裂性和高尺寸稳定性。
2、近年来,人们对扶手的技术性能和视觉外观的要求越来越高,同时也增大了可通过节省材料、复杂性、部件质量或设计抵消的成本压力。由于城市化的趋势,需要在自动扶梯和自动人行道上越来越快地运送越来越多的人。设备的运行时间急剧增加,并且许多应用是全天候运行的,同样,建筑师和运营商对自动扶梯的应用和运行标准也越来越高,并且运行条件也越来越苛刻。例如,将自动扶梯布置在大型玻璃墙后面或没有防风雨保护的室外。此外,空气污染、环境温度升高和极端天气事件的环境也会对扶手的耐用性产生负面影响。
3、然而,与此相比,对光学性能的要求却越来越高。
4、此外,即使在运行几年后,扶手的尺寸也应在规定的较小公差范围内。此外,牵引力在潮湿和干燥条件下仍应可控,并且环境污染不得对扶手的性能产生负面影响。扶手的功能不得因开裂或磨损而受损,并且抗老化剂不得污染表面。此外,具有高人口密度和大私人交通量的地方的更高氮氧化物浓度、高空气湿度、大温度变化、为了节省设备成本而更小的弯曲半径、少维护量等进一步限制了扶手的性能,并且需要改进扶手的设计、工艺和材料。
5、传统的橡胶扶手具有一个或多个由橡胶和纤维或织物制成的内层,该内层提高了横向刚度和尺寸稳定性。包覆层例如由sbr聚合物构成。在压模中被硫化之前,所有层都以“夹层”结构连接在一起。另一方面,传统的塑料扶手通常由塑料复合物制成。
6、橡胶扶手在其使用寿命内能提供更高的耐用性和良好的性能。然而,当在温度升高和臭氧浓度增加的区域内使用时,抗老化成分可能会到达扶手表面并弄脏使用者的手。
7、塑料扶手能提供光亮的表面,但由于它们在动态变形较小,因此在动态性能和在某些自动扶梯类型上的应用中存在缺点。
8、橡胶扶手是目前最常安装的扶手。这种扶手在两个弯曲方向(正向和反向)上都非常灵活,并且具有良好的动态性能和良好的耐磨性。然而,在高温、阳光直射或臭氧污染增加的室外条件下,这种扶手会受到限制。在这种情况下,橡胶扶手的保护成分过度污染扶手表面,(特别是在夏季)这会导致负面的客户反馈。减少保护成分的量或在橡胶扶手中使用其它成分可能显著降低橡胶扶手的耐用性和使用寿命。
9、近年来,塑料扶手由于其光亮的表面而越来越受欢迎,然而,增加的弯曲刚度,特别是在向后弯曲(反向弯曲)时,由于更硬的扶手需要更大的弯曲力,这导致牵引力损失和更高的能耗,因此会影响具有小扶手牵引轮的自动扶梯上的塑料扶手的牵引性能。另一个缺点是,由于扶手有时不遵循引导辊的弯曲曲线(承受相同载荷的接触点更少,接触压力增加,因此断裂风险提高),因此增大了在自动扶梯的栏杆柱头和自动扶梯返回的区域中辊断裂的风险。
10、现有技术中已知的扶手都不能提供即使在恶劣的环境影响下也能不受限制地使用,并确保有效运行的可能性。已知的解决方案都具有这样和/或那样的缺点。
技术实现思路
1、因此,本发明的目的是提供一种用于自动扶梯和自动人行道的扶手,该扶手能满足更高的要求、具有改进的视觉外观并且为持久且高效的运行提供新的可能性。此外,还要提供一种用于制造这种扶手的方法。
2、本发明通过具有权利要求1的特征的扶手以及具有权利要求15的特征的用于制造这种扶手的方法来解决了这些问题。优选的实施例是从属权利要求的主题。
3、根据本发明的一方面,提供了一种安装在或能够安装在引导元件上的用于自动人行道、自动扶梯等的扶手,其中,扶手具有沿其轮廓方向基本恒定的横截面。扶手优选地包括布置在或能够布置在引导元件上的构架(karkasse)。扶手优选地包括布置在构架上的包覆层。包覆层优选地包括热塑性弹性体(thermoplastisches elastomer)。
4、对于现有技术中可用的橡胶扶手,由于扶手表面和塑料层之间的连接不具有足够的附着性(附着力或粘接力),因此不能利落地应用塑料层。换句话说,塑料和橡胶之间的附着性较差,并且不能提供扶手所需的粘接力。为此,目前使用塑料扶手,而不是使用橡胶扶手上的塑料层。对于常见的塑料扶手,由于这些扶手的稳定性来自于与橡胶相比明显更稳定的塑料材料,因此不需要构架。在此提供构架是多余的,并且不会带来任何优点。相反,由于处理复杂并且这种组合没有明显的优点,因此将带来成本劣势。
5、与常见扶手相比,根据本发明的扶手提供了橡胶扶手的有利动态性能以及塑料扶手的有利表面特性。因此,根据本发明的扶手无论气候环境条件如何都可以用在所有自动扶梯和自动人行道(包括具有小弯曲半径的自动扶梯和自动人行道)上。优选地,包覆层包括热塑性弹性体,该热塑性弹性体可以更容易地应用到构架上,并且同时具有与常见的塑料扶手类似的对环境影响的抵抗能力。
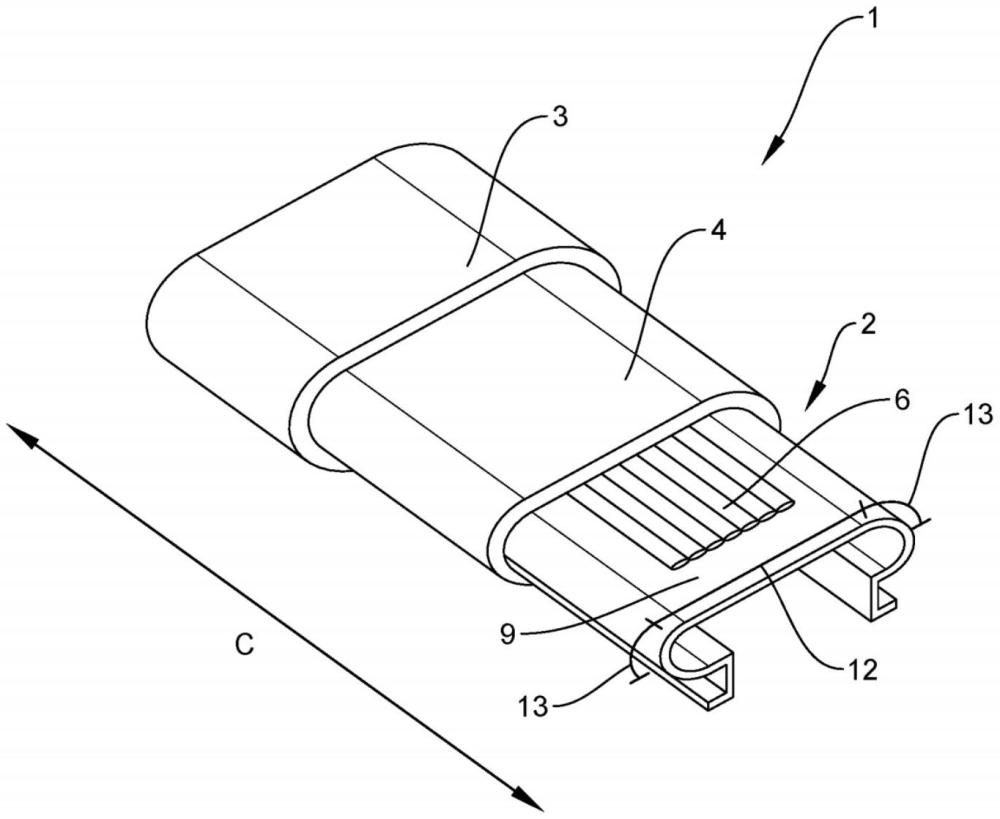
6、扶手沿轮廓方向以基本恒定的横截面延伸。因此,允许扶手在轮廓方向上相对于引导元件移动,以便为站在自动人行道或自动扶梯上的人(使用者)提供牢靠的握持。在扶手移动期间,诸如导轨等引导元件可以引导扶手。扶手可通过引导元件正向(即,向上)弯曲和反向(即,向下)弯曲。为此,扶手可以至少部分地环绕引导元件。优选地,扶手在横向于轮廓方向的横截面中具有部分环绕引导元件的c形。因此,扶手安装在或能够安装在引导元件上。因此,扶手可以在横向于轮廓方向的横截面中具有c形。扶手的沿轮廓方向的横截面可以是基本恒定或均匀的。这也包括由于制造公差而造成的高达15%的公差。扶手的横截面可分为两个弯曲的端部区域以及连接端部区域的平坦的中心区域。端部区域可以关于穿过扶手的横截面重心延伸的轴线对称。因此,可以特别容易地制造扶手。扶手可被设计为没有终点或起点的连续的环形元件。因此,扶手可被设计为使得除了引导元件之外,扶手还可以经由大量偏转辊(正向和反向地)偏转和/或弯曲。因此,通过使扶手更容易弯曲(即,更小的抗弯能力),显著减少了用于驱动扶手的能量需求。包覆层可以至少部分地位于扶手的表面上。例如,包覆层可以在某些位置嵌入到构架中,并且与构架一起形成例如可被使用者抓握的平面。特别有利的是,包覆层在构架的在横截面中发生构架弯曲或曲折的区域中设置在构架中。因此,一方面可以节省材料,另一方面可以实现扶手的舒适触感。补充地或替代地,包覆层可以作为截面中突出部设置在构架上。例如,包覆层可以作为带状元件沿轮廓方向延伸。因此,包覆层3的可被使用者抓握的表面可以具有结构化表面。在横截面中,该结构可以被设计成例如拱形结构因此,可以减小使用者的手与扶手之间的接触面积,从而可以改善使用者的卫生感。优选地,包覆层可以布置在扶手上,使得包覆层覆盖扶手的背向引导元件的一侧。因此,确保了扶手受到可靠的保护以免受环境影响。在一实施例中,包覆层可被设计为使得其形成可被使用者抓握的具有多个拱形结构的表面。因此,扶手可为使用者提供特别牢靠的握持。
7、扶手的横截面的端部区域可以具有例如比中心区域小0.3至0.8倍的材料厚度。已发现,该比例有利地减小了扶手的弯曲力,同时确保了扶手的足够的横向稳定性。因此,可以减少用于驱动扶手的能量需求,同时即使在突然受到横向力的情况下也可以确保扶手的稳定引导。此外,扶手可被设计为可与直径小于500mm的驱动辊和/或引导辊一起使用。在此,可以实现100至270°的包角。由于减小了扶手上的单位面积的力(即,拉伸力),因此提高了扶手的耐久性。优选地,驱动辊和/或引导辊可以具有小于400mm的直径。由于根据本发明的扶手的高柔性且容易弯曲,即使在这些小直径的情况下也可以有利地、节能地使用(即,在这种情况下也可以实现上述包角)。因此,特别地,该扶手可以有利地用于在栏杆柱头(alustradenkopf)中具有驱动器的自动扶梯(例如,交通扶梯)。在栏杆柱头中,扶手围绕驱动辊的包角通常更大。
8、扶手的构架可以包括至少三个不同的层,并且被设计为用于为扶手提供沿轮廓方向以及横向于轮廓方向的稳定性。特别地,构架可以具有能够与引导元件接触的滑动层。在此,该滑动层可以最小化扶手与引导元件之间的摩擦。为此,滑动层可以例如包括特氟龙或其它滑动材料。因此,可以进一步减少用于驱动扶手的能量需求。另外,构架可以包括拉伸元件(受拉构件),该拉伸元件可以是由钢纤维、聚合物纤维或碳纤维制成的膨胀式制动器。拉伸元件可以吸收拉伸力,使得可以基于所使用的拉伸元件实现扶手的最大可能伸长。拉伸元件可以确保扶手在其使用寿命内在轮廓方向上的伸长受到限制。拉伸元件只能设置在扶手横截面的中心区域中。因此,端部区域可以容易制造,并且扶手的总重量可以保持较低。构架还可以包括至少一个内层(例如,包括橡胶、热塑性弹性体、织物或它们的组合的基本层)。此外,构架可以包括包含橡胶和/或热塑性弹性体的辅助层,特别是保护层。辅助层可以例如覆盖受拉构件,使得其插入在基本层和辅助层之间。基本层可以是与构架分离的单独层,其仅在制造时连接到构架。在此,该层可以是独立的、尤其固有稳定的元件(即,该层特别不是以任意方式应用的材料等)。这也同样适用于辅助层。因此,可以避免尤其受拉构件对滑动层的损坏。因此,可以提供构架的足够的稳定性。
9、膨胀式制动器(即,特别是拉伸元件)和滑动层可以组合在一个层中。因此,可以简单地设计构架,从而简化其制造。膨胀式制动器和滑动层的组合特别适合于相对较短的扶手,与长扶手相比,短扶手产生的拉伸力更小。
10、通过提供优选地被设计为夹层结构的构架,可以实现扶手的如在例如橡胶扶手中的已知的动态特性。优选地,可以使用其设计和制造与橡胶扶手的构架相对应的构架。因此,可以避免增加半成品或制造过程中的复杂性。特别地,与橡胶扶手的不同之处在于,包覆层可以使用热塑性弹性体(tpe)。包覆层可以使用诸如模压、浇铸、浸渍、喷涂、刷涂和/或挤压等常规生产方法应用到构架上。包覆层可以应用在架构的上层。
11、在另一实施例中,构架可以具有至少一个从构架突出的元件,该元件布置在构架的与包覆层相反的一侧。在此,突出元件可被设计为在突出方向上逐渐变窄的元件(例如,楔形件)。此外,突出元件可被设计为与用于在自身上引导扶手的引导元件接触。因此,可以改善扶手在引导元件上的引导。
12、构架的表面可以由涂布的和/或处理的织物构成,该织物例如是帘线或纤维(例如,碳、聚酰胺、聚酯)。可能的处理特别地包括诸如间苯二酚-甲醛乳胶(rfl)、聚氯乙烯(pvc)、热塑性弹性体(tpe)、橡胶、异氰酸酯、粘合剂等涂层。
13、在包覆层使用透明材料的情况下,构架可以具有其它功能。因此,构架可以例如包括根据扶手的运行状态(例如,扶手的速度、温度)发出光信号的光源。由于透明的包覆层,光信号是可见的。例如,可以在构架中设置有大量led,这些led例如通过它们的光颜色显示扶手的温度和/或速度。此外,还可以通过光源引导人流。因此,在进入自动扶梯或自动人行道时,可以使用类似交通信号灯的灯信号,使得扶手向等待的人通知何时允许进入。还可以想到的是,通过显示诸如箭头等图案来指示扶手的移动方向。此外,还可以通过灯信号来指示人们在自动人行道或自动扶梯上必须遵守的间隔,以遵守所需的距离规则。为了实现上述功能,扶手可以具有可记录相应信息以传递给使用者的传感器。此外,扶手可以具有控制单元,该控制单元被设计为基于从传感器获得的信息来控制光源。这些传感器可以是温度传感器和/或运动传感器。
14、包覆层的材料厚度(即,厚度)可以取决于扶手的计划用途。优选地,材料厚度在几微米直到12mm的范围内。在该范围内,已经证明,扶手一方面在抵抗诸如紫外线污染、臭氧污染、剧烈温度波动等环境影响方面具有期望的性能,另一方面具有足够的柔性,以便即使驱动辊的半径较小也能高效地使用。特别优选地,包覆层的材料厚度与扶手的弯曲半径的比率在0.005至0.0125的范围内。在该范围内,已经发现在扶手的纵向和横向刚度与柔性之间达到了最佳比率。因此,可以在用于驱动扶手的最小能量需求的情况下在驱动辊和偏转辊上安全地引导扶手。在这种情况下,术语“弯曲半径”应理解为假想圆的半径,扶手可以以100°至270°的包角包裹在该假想圆上,而不会发生损坏(即,无塑性变形)且不会缩短扶手的使用寿命。当在紧凑型自动人行道或自动扶梯上使用扶手时,这尤其重要,因为在这种情况下经常使用非常小的偏转辊和/或驱动辊。在使用自动扶梯或自动人行道时,包覆层可以为使用者提供安全且舒适的握持。特别优选地,包覆层的材料厚度与扶手的弯曲半径的上述比率在0.005至0.0075的范围内。在该范围内,横截面为c形的扶手可以实现特别高效的运行,因为在这种情况下扶手的形状增加了稳定性,并且更薄的包覆层确保了运行时的效率。
15、热塑性弹性体(tpe)是一种特殊的塑料,其在室温下的性能与传统弹性体类似,但在加热时会发生塑性变形,从而表现出热塑性特性。例如,其它弹性体是化学上粗大网眼交联的空间网状分子。在不破坏材料的情况下不能解除这种弹性体的交联。相反,热塑性弹性体可以是一种将弹性聚合物链结合到热塑性材料中的材料。因此,热塑性弹性体可以在纯物理过程中结合高剪切力、热作用和随后的冷却进行加工。虽然热塑性弹性体不需要像其它弹性体那样通过耗时且在温度上复杂的硫化进行化学交联,但由于其特殊的分子结构,它可以具有橡胶弹性的特性。因此,能够降低包覆层的抗弯强度。热塑性弹性体在部分区域中具有物理交联点(次价力或微晶),这些物理交联点加热时解除,而不会分解大分子。因此,它们比其它弹性体明显更容易加工。因此,在扶手用废之后,也可以容易回收包覆层,这整体上改善了扶手的生命周期评估。
16、例如,扶手可在提供扶手表面的连续清洁的自动人行道或自动扶梯上使用。这可以通过耐磨的包覆层来实现。因此,在持续清洁扶手时,也可以保持根据本发明的扶手的长使用寿命。特别是受covid-19大流行的影响,可以用连续的紫外线光源处理扶手表面,以减少病毒和细菌的污染。这种清洁装置可以用在自动扶梯的回程中。
17、因此,本发明提供了一种对环境影响具有高抵抗能力并且同时允许设置有扶手的自动扶梯或自动人行道的有效运行的扶手。该特性可以通过联合使用构架和包含热塑性弹性体的包覆层来实现。这种组合的效果是令人惊讶的,因为由热塑性弹性体制成的包覆层由于其具有高固有稳定性而实际上不需要(例如,通过构架的)任何稳定过程。通常仅在柔软或橡胶类包覆层的情况下才需要构架为扶手提供必要的稳定性。
18、优选地,热塑性弹性体包括聚氨酯。
19、取决于聚异氰酸酯(polyisocyanate)和多元醇(polyol)的选择,聚氨酯可以具有不同的特性。聚氨酯可以在未发泡的状态下使用,以增加包覆层的耐受性/抵抗性。聚氨酯的密度可以在1000和1250kg/m3之间变化。因此,可以实现包覆层的必要稳定性。此外,聚氨酯可以具有与构架的良好粘合性能,并因此可以有利地将其应用到构架上。此外,聚氨酯具有较高的耐溶剂性、耐化学品性和耐气候性。
20、在本发明的一实施例中,设置有由聚氨酯制成的包覆层,该包覆层至少在中心区域中具有1.5至3.5mm的材料厚度。在此,包覆层的肖氏硬度可以为75至85sha。可以根据iso48-4:2018测量肖氏硬度。
21、在这种情况下,与橡胶扶手相比,扶手的横向刚度可以增加至少20%。特别地,包覆层在端部区域中的材料厚度可以等于在中心区域中的材料厚度。因此,可以增加端部区域的刚度,这可以防止扶手在运行过程中从引导元件中拉出。此外,由于扶手使用聚氨酯而更加柔韧,因此与同类塑料扶手相比,纵向刚度可以降低超过40%。因此,减少了扶手运行时的损失,从而可以更有效地运行扶手。
22、优选地,构架具有面对包覆层的基本层和在扶手的轮廓方向上延伸的拉伸元件。
23、基本层可以是构架的上部镶嵌物(einlage)。基本层可以直接连接到包覆层。因此,基本层可被设计为在包覆层和构架之间建立连接。基本层可由织物形成。在这种情况下,基本层可以有助于构架的整体稳定性。优选地,基本层包含tpe和/或橡胶(例如,橡胶复合产品)。在这种情况下,可以达到至少5n/mm2的粘接力。此外,可以使用现有的标准半成品(例如,用于制造橡胶扶手的半成品)来制造构架。因此,可以将制造扶手时的效益和效率保持在较高水平。
24、作为使用上述物质对基本层的处理的补充和替代,基本层可以在其面对包覆层的上侧被结构化。该结构化可以产生定义的粗糙度。例如,该结构化可以包括凹印(凹陷)和/或孔。因此,可以进一步对构架和包覆层之间的粘接力产生积极影响。
25、此外,基本层可以是橡胶处理织物(gummiertes gewebe)。可以对橡胶处理织物进行硫化,以增加基本层的内部稳定性。此外,橡胶处理织物可以具有增粘剂(例如,其中一个上述处理面或它们的组合),以确保包覆层可靠地粘合在构架上。此外,利用物质可以将橡胶处理织物溶胀。为此,橡胶处理织物可以包含溶胀物质或可以被物质溶胀。因此,可以在构架和包覆层之间提供可靠的连接。要用于溶胀橡胶包覆层的物质(特别是溶剂)的选择可以通过汉森溶解度参数(hansen solubility parameter)系统进行优化。汉森溶解度参数是三维溶解度参数。它们包括伦敦相互作用中的色散分量(δd)、偶极相互作用中的分量(δp)和用于氢键结合的分量(δh)。优选地,使用如下物质,该物质的参数δd、δp和δh处于包覆层(其中,包覆层例如包括聚氨酯)和构架(即,构架的面对包覆层的上层)的材料的溶解度参数+/-4的范围内。因此,可以使用大量溶胀材料来实现包覆层和构架之间的牢固粘合。更优选地,要使用的物质的溶解度参数位于这两个溶解度参数之间。在这种情况下,已经发现,在该范围内,即使围绕具有较小半径的辊引导扶手,也能在构架和包覆层之间实现特别良好的固定。此外,优选的是,要使用的物质的溶解度参数位于构架(例如,构架的上层)材料和包覆层材料之间的平均值+/-两种材料之间的溶解度参数差异的一半的范围内。在这种情况下,如果包覆层包含聚氨酯,则可以实现包覆层在构架上的特别良好的固定。
26、为了实现增强,基本层可以具有横向增强件,该横向增强件在相对于扶手轮廓方向的横向方向上提供增强。横向增强件可以包括纤维、帘线和/或织物。因此,可以确保扶手在引导元件上的安全引导。
27、优选地,基本层由弹性体形成,并且拉伸元件嵌入在基本层中。
28、因此,基本层可以形成为完全包围拉伸元件的弹性体镶嵌物。这种情况下的优点在于简化了半成品的加工。此外,由于拉伸元件受到基本层的屏蔽或保护,因此避免了拉伸元件对扶手的其它元件的损坏。因此,例如可以可靠地防止拉伸元件和滑动层之间的接触,而无需提供附加层来保护滑动层。
29、优选地,基本层具有横向于扶手的轮廓方向的纤维增强件,并且纤维增强件优选地包括玻璃、碳、聚酰胺和/或聚酯。
30、如上所述,可以由此增加基本层的横向稳定性,并因此增加整个扶手的横向稳定性,从而可以在引导元件上牢靠地引导扶手。优选地,基本层仅在两个端部区域中具有纤维增强件。因此,可以特别增强端部区域,使得扶手对横向载荷具有高抵抗能力,并防止扶手意外撕裂。因此,可以在引导元件、引导辊和驱动辊上更加牢靠地引导扶手。
31、优选地,基本层至少在其面对包覆层的一侧具有多个孔。
32、这些孔可以是基本层的面对包覆层的一侧上的凹陷。因此,可以改善构架和包覆层之间的机械粘接。此外,孔可以是延伸穿过基本层的通孔。因此,可以更容易地制造孔,这提高了扶手制造过程的效率。此外,上述优点可以通过孔(基本层的结构化)来实现。
33、优选地,基本层由橡胶处理织物形成,特别地被硫化,并且其中,基本层优选地包括氯丁二烯橡胶、天然橡胶、苯乙烯-丁二烯橡胶和/或聚丁二烯橡胶。
34、硫化可以产生具有足够稳定性的稳定接合。此外,除了基本层之外,可以对整个构架进行硫化。因此,构架的各个部件可以有利地相互连接。尤其当包覆层包含聚氨酯时,通过利用cr(氯丁二烯橡胶)、nr(天然橡胶)、sbr(苯乙烯-丁二烯橡胶)和/或br(聚丁二烯橡胶)处理基本层,可以在构架和包覆层之间提供良好的粘合力。此外,这种构架或基本层可以在现有的机床上生产或加工,而无需进行结构性调节。因此,扶手的制造可以是特别简单且低成本的。
35、优选地,基本层在其面对包覆层的一侧上具有表面结构,尤其具有在轮廓方向上的且/或横向于轮廓方向的凹陷。
36、在此,表面结构可以是使基本层的面对包覆层的表面变得粗糙的结构。因此,例如可以设置有凹陷、凸起或两者的组合。凹陷可以是基本层的表面结构的示例。凹陷可以被设计为细长凹陷的形式(例如,一个凹槽或多个凹槽的形式)。凸起可以以材料突出部的形式从基本层突出。在此,横向于扶手的轮廓方向的细长凹陷和/或凸起可以设置在基本层上,以便确保当产生沿轮廓方向上的力时包覆层粘附到构架上。补充地或替代地,凹陷可以在轮廓方向上设置在基本层上,以便确保当产生横向于轮廓方向作用的力时包覆层粘附到构架上。优选地,凹陷相对于轮廓方向以大于0°且小于90°的角度倾斜。在这种情况下,可以通过横向于轮廓方向和沿轮廓方向作用的力来确保包覆层粘附到构架上。更优选地,凹陷相对于轮廓方向的角度在30°和60°之间。已经发现,在该范围内,即使扶手(例如,通过驱动辊)以小于400mm的半径偏转,也能实现包覆层与构架的最佳粘附。
37、优选地,基本层在其面对包覆层的一侧上具有增粘剂,特别是具有聚氨酯友好型处理面的镶嵌物。
38、增粘剂可以是在不混溶物质之间的界面处产生紧密的物理或化学结合的物质。因此,即使构架和包覆层由不同的材料制成,包覆层也能够可靠地固定或安装到构架。特别地,基本层可以包括间苯二酚-甲醛乳胶(rfl)、聚氯乙烯(pvc)、热塑性弹性体(tpe)、橡胶、异氰酸酯和/或粘合剂。优选地,基本层具有在包覆层和构架之间提供≥5n/mm2的粘接力(也被称为剥离强度或粘合力)的处理面。这可以确保包覆层和构架在扶手的使用寿命内可靠地相互连接。特别地,可以用间苯二酚-甲醛乳胶(rfl)、聚氯乙烯(pvc)、热塑性弹性体(tpe)、橡胶和/或异氰酸酯、粘合剂来处理构架。在这种情况下,包含聚氨酯的包覆层可以有利地固定到构架。如果使用其中一个上述涂层,则可以实现包覆层和构架之间的至少5n/mm2的粘合力。因此,即使在扶手处于高环境应力的情况下,也可以实现构架和包覆层之间的可靠固定。此外,可以提供化学反应性“热熔膜”,以在构架和包覆层之间产生粘合力。该膜可以设置在构架的面对包覆层的一侧上,并且可以与构架和包覆层一起硫化。该膜具有无溶剂且材料价格低的优点。此外,热熔膜的处理快速且容易。因此,但不同的材料可以容易地相互连接。
39、优选地,扶手具有滑动层,该滑动层以能够与引导元件接触的方式布置在构架上。
40、换句话说,滑动层可以以其面对环境的方式设置在扶手上(即,不被其它层覆盖),并且因此可以放置在引导元件上。滑动层优选地设置在构架上。因此,只需要将包覆层安装到已制造完成的构架上,即可简化工作步骤。如上所述,滑动层可以减少扶手与引导元件之间的摩擦,使得扶手可以有效地运行。滑动层可以布置在扶手上,使得拉伸元件位于滑动层和包覆层之间。
41、优选地,构架具有辅助层,使得拉伸元件插入在基本层和辅助层之间。
42、辅助层可以按照与基本层相同的方式设计。因此,可以在扶手中提供对称的弯曲载荷分布,这延长了扶手的整体使用寿命。然而,辅助层可以是例如通过另一层(例如,拉伸元件)与基本层分离的单独层。此外,辅助层可以保护滑动层免于与拉伸元件直接接触。因此,可以确保滑动层的耐用性。
43、优选地,基本层和/或辅助层包括织物结构或带状结构。
44、因此,可以增加基本层和/或辅助层的强度。特别地,可以增加扶手的整体抗拉强度。然而,织物或带状结构可以提供足够的弹性,使得扶手在运行过程中能够以很少的能量消耗适应于引导元件和/或引导辊和驱动辊。优选地,拉伸元件包括钢、芳纶、玻璃纤维和/或碳。
45、因此,可以提供具有高抗拉能力的扶手,从而还可以实现非常长的扶手。芳纶、玻璃纤维和/或碳的另一个优点是它们相对较轻,因此提高了扶手的整体运行效率。此外,这些材料易于与构架一起加工,从而可以简化扶手的制造。
46、根据本发明的另一方面,提供了一种用于制造扶手,特别是用于制造根据前述任一项权利要求所述的扶手的方法,其中,该方法包括以下步骤:提供构架,以及通过模压、浇铸、浸渍、刷涂和/或挤出将包覆层应用到构架上,其中,包覆层包括热塑性弹性体。
47、因此,可以使用现有的构架来生产扶手。换句话说,构架可以单独地制造。例如,可以通过将构架从存储辊上解绕来提供构架。因此,可以容易地存放构架。可以提供已处于完全硫化状态下的构架。然后,可以将构架送入进料装置。进料装置使构架预张紧。因此,可以防止构架下垂并且不能精确地应用包覆层(即,可以防止包覆层材料厚度的不期望的波动)。然后,可以将构架送入预热器。在这种情况下,可以预热构架,使得在随后的挤出过程中,挤出材料不会过快冷却,在过快冷却时,包覆层和构架之间的材料结合不具有所需的粘接力。通过该步骤,可以实现包覆层和构架之间的至少5n/mm2的粘接力(也参见上文有关这方面的说明)。然后,可以将构架送入挤出机。挤出机可以具有横向挤出头,以便在构架的整个横截面上形成包覆层。此外,可以将挤出机校准,以便在实际挤出包覆层之前,能够根据构架的供应速度为热塑性弹性体设定到挤出机的供应速度,以便能够实现期望的包覆层材料厚度。在将包覆层应用到构架上之后,可以将以此方式形成的扶手送入冷却池。然后,可以在履带式出料装置(abzugsraupe)中对扶手进行处理,以确保包覆层表面光滑和洁净。然后,在将扶手卷绕到滚筒卷绕机上之前,可以进行覆膜步骤(folierschritt)和/或贴标步骤(signierschritt)。
48、该装置的所有特征和优点也类似地适用于该方法,反之亦然。各个特征可以与其它特征组合,以便组合与特征相关的优点。
- 还没有人留言评论。精彩留言会获得点赞!