一种多耦合协同加装装置及其调控方法与流程
本发明属于农业测控技术,特别是一种播种-施肥-喷药多耦合协同按需加装调控装置及方法。
背景技术:
1、播种是作物栽培措施之一,是将播种材料按一定数量和方式,适时播入一定深度土层中的作业,播种适当与否直接影响作物的生长发育和产量。施肥是指将肥料施于土壤中或喷洒在植物上,提供植物所需养分,并保持和提高土壤肥力的农业技术措施,其主要目的是增加作物产量,改善作物品质,培肥地力以及提高经济效益。喷药是将水与药液混合后通过压力将液体喷洒到作物表面,用于灭虫、除草、杀菌等,确保农作物产量。因此,合理和科学地播种施肥喷药是保障粮食安全和维护农业可持续性发展的主要手段之一。
2、现有技术在播种-施肥-喷药多耦合协同按需加装方面基本上采用人工或半机械化的方式,难以匹配播种施肥喷药机器作业进度,直接影响播种施肥喷药工作进程,存着生产效率低、劳动强度大、作业成本高等问题,并且提高生产作物机械化播种施肥喷药水平是作物种植节本增效的重要途径和发展趋势。目前,播种-施肥-喷药按需加装装置主要依靠人工经验,调节相应的机构工作参数,准确性和实时性较低,另外,由于无法实时检测其装置的实际工作参数,无法准确把握调节量,进而无法建立基于反馈的播种-施肥-喷药按需加装工作参数自动调节系统,自动化程度较低。因此,如何保证高效、低损、均匀地自动加装种肥药是未来播种-施肥-喷药多耦合协同按需加装技术亟待解决的问题。
技术实现思路
1、本发明所要解决的技术问题是针对现有技术的上述缺陷,提供一种多耦合协同加装调控装置及方法。
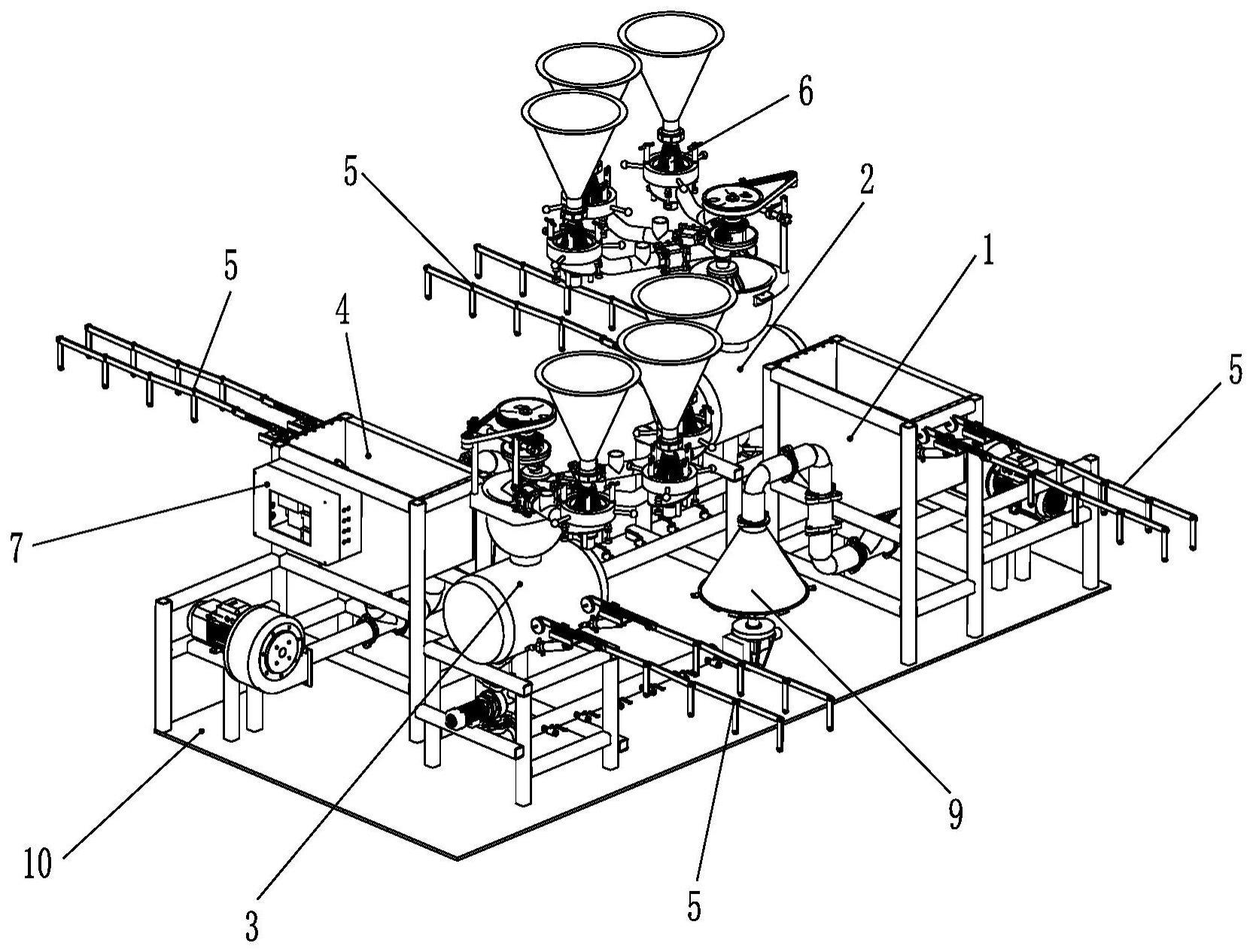
2、为了实现上述目的,本发明提供了一种多耦合协同加装装置,其中,包括:
3、主机架;
4、种仓自动补给机构,安装在所述主机架上,用于播种施肥喷药机自动补种;
5、固态肥自动补给机构,安装在所述主机架上,用于所述播种施肥喷药机自动补肥,所述固态肥自动补给机构与所述种仓自动补给机构结构相同;
6、液态肥自动加注机构,安装在所述主机架上并位于所述固态肥自动补给机构一侧,用于所述播种施肥喷药机自动加注液态肥;
7、药液自动加注机构,安装在所述主机架上,用于所述播种施肥喷药机的喷药机自动加注药液,所述药液自动加注机构与所述液态肥自动加注机构结构相同;
8、中央控制器,安装在所述主机架上,分别与所述种仓自动补给机构、固态肥自动补给机构、液态肥自动加注机构和药液自动加注机构连接,用于实时调整各机构的工作状态,并规划各机构协同作业;
9、调控机构,分别设置在所述种仓自动补给机构、固态肥自动补给机构、液态肥自动加注机构和药液自动加注机构上,并与所述中央控制器连接;以及
10、驱动电机,分别与所述种仓自动补给机构、固态肥自动补给机构、液态肥自动加注机构、药液自动加注机构和中央控制器连接;
11、其中,所述种仓自动补给机构、固态肥自动补给机构、液态肥自动加注机构和药液自动加注机构分别设置有旋转变量开关和空间位置调节机构;所述液态肥自动加注机构和药液自动加注机构分别设置有自动配给器,所述种仓自动补给机构和固态肥自动补给机构分别设置有气流分配器,所述旋转变量开关、空间位置调节机构、自动配给器和气流分配器分别与所述中央控制器、调控机构及所述驱动电机连接。
12、上述的多耦合协同加装装置,其中,所述调控机构包括:
13、速度传感器,用于检测转速;
14、超声波接近传感器,分别安装在所述播种施肥喷药机的种箱、肥箱和药箱上,用于检测种子、固态肥、液体肥及药液余量;
15、倾角传感器,用于检测所述播种施肥喷药机的种箱、肥箱和药箱的水平倾斜角度;
16、流量传感器,用于检测种子、固态肥、液态肥及药液的流量;以及
17、编码器,安装在所述旋转变量开关上,用于检测所述旋转变量开关的转动角度;
18、所述速度传感器、超声波接近传感器、倾角传感器、流量传感器和编码器分别与所述中央控制器连接。
19、上述的多耦合协同加装装置,其中,所述种仓自动补给机构和固态肥自动补给机构分别包括:
20、自动补给架,安装在所述主机架上;
21、仓体,安装在所述自动补给架上,用于储存和提供种子或固态肥;所述旋转变量开关对应于所述仓体底端安装在所述自动补给架上,用于控制卸种或卸固态肥的速度;所述仓体上安装有所述超声波接近传感器,所述激光雷达传感器安装在所述仓体的外壁上,用于检测所述仓体与最靠近的所述种箱/肥箱之间的水平距离;
22、扰动机构,安装在所述自动补给架上,并位于所述仓体内,用于扰动所述仓体内部的种子或固态肥,防止其堵塞且确保种子或固态肥均匀下落;所述扰动机构上安装有所述速度传感器;
23、风机,安装在所述自动补给架上,用于控制种子或固态肥的补给速度;所述风机上安装有所述速度传感器;
24、补料管道,安装在所述空间位置调节机构上,用于将种子或固态肥补给到所述播种施肥喷药机的种箱或肥箱内,所述补料管道上安装有所述倾角传感器和流量传感器;所述激光雷达传感器安装在所述补料管道出口处,用于检测所述补料管道与所述种箱、肥箱和药箱之间的垂直距离;所述空间位置调节机构,安装在所述自动补给架上,用于调节所述补料管道与所述种箱的对接位置;所述气流分配器,安装在所述自动补给架上,与所述补料管道连接,用于将种子或固态肥分配到不同的所述补料管道内,所述气流分配器和空间位置调节机构分别安装有所述速度传感器;以及
25、输送管道,安装在所述自动补给架上,并与所述旋转变量开关连接,所述输送管道的进风口与所述风机连接,所述输送管道的出风口与所述气流分配器连接,用于改变种子或固态肥的输送方向;所述输送管道的内壁上安装有所述流量传感器。
26、上述的多耦合协同加装装置,其中,所述调控机构还包括:
27、气流速度传感器,分别安装在所述输送管道、补料管道和气流分配器上,并与所述中央控制器连接,用于检测所述输送管道、补料管道和气流分配器的气流速度。
28、上述的多耦合协同加装装置,其中,所述药液自动加注机构和液态肥自动加注机构分别包括:
29、支架,安装在所述主机架上;
30、液仓,安装在所述支架上,用于储存和提供药液或液态肥,所述液仓安装有超声波接近传感器,所述液仓的外壁上安装有所述激光雷达传感器,用于检测所述液仓与最靠近的所述肥箱/药箱之间的水平距离;所述自动配给器,安装在所述支架上,位于所述液仓上方,并与所述液仓的入口连接,用于所述液仓自动直接加注配药或配液态肥;所述旋转变量开关,安装在所述支架上,并位于所述液仓下面,用于控制卸药液或液态肥的速度;
31、液体扰动机构,安装在所述支架上,置于所述液仓内部,用于扰动所述液仓内部的药液或液态肥,防止堵塞且确保药液或液态肥均匀流动;所述液体扰动机构上设置有所述速度传感器;
32、管道泵,安装在所述支架上,用于控制药液或液态肥的加注速度,所述管道泵上安装有所述速度传感器;以及
33、液体输送管道,安装在所述支架上,所述液体输送管道的进口与所述管道泵连接,所述液体输送管道的出口与液体加注管道连接,用于改变药液或液态肥的流动方向,并将药液或液态肥分配到不同的所述液体加注管道内,所述液体输送管道和液体加注管道的内壁上分别安装有所述流量传感器,所述液体加注管道上安装有所述倾角传感器,所述液体加注管道出口处安装有所述激光雷达传感器,用于检测所述液体加注管道与所述肥箱之间的垂直距离;所述空间位置调节机构安装在所述支架上,用于调节所述液体加注管道与所述播种施肥喷药机的肥箱的对接位置。
34、上述的多耦合协同加装装置,其中,所述自动配给器包括:
35、喂入筒,用于喂入配药或配肥的各组成物料,所述喂入筒数量对应于配药或配肥的组成物料数量;所述喂入筒设置有所述超声波接近传感器;
36、螺旋输送机构,与所述喂入筒的出口连接,用于输送配药或配肥的各组成物料;所述螺旋输送机构上安装有所述速度传感器;
37、自动配给管道泵,安装在所述螺旋输送机构上,用于控制所述液仓自动配药或配肥速度;所述管道泵上安装有所述速度传感器;
38、配料筒,位于所述螺旋输送机构的出口下方,用于药液或液态肥搅拌配料,所述配料筒的顶部设置有所述超声波接近传感器;以及
39、搅拌机构,位于所述配料筒内,用于将配药或配肥的各组成物料搅拌均匀以完成药液或液态肥自动配料,所述搅拌机构上设置有所述速度传感器。
40、上述的多耦合协同加装装置,其中,所述空间位置调节机构包括:
41、支撑滑块,安装在滑块底座上;
42、凸轮盘,与所述驱动电机连接;
43、滑块连杆,一端与所述凸轮盘连接;所述滑块连杆的另一端与连接杆连接;所述驱动电机驱动所述连接杆水平伸缩运动,以实现与所述播种施肥喷药机的种箱、药箱或肥箱水平方向精准对接;
44、摇杆,一端与所述连接杆连接,所述摇杆的另一端与所述补料管道或液体加注管道连接;以及
45、液压缸,一端与所述滑块底座连接,所述液压缸的另一端与所述仓体或液仓连接,所述液压缸上安装有拉线位移传感器,用于检测所述液压缸的伸缩位移量。
46、上述的多耦合协同加装装置,其中,所述旋转变量开关包括:
47、固定筒,安装在所述自动补给架或支架上,并位于所述仓体或液仓下方;
48、多个旋转卸载片,安装在所述固定筒上并呈圆周阵列分布;以及
49、旋转变量卸载轮,与所述旋转卸载片连接,并带动旋转卸载片移动以调整卸载口的大小控制卸料速度;所述旋转变量卸载轮的转轴上设置有所述速度传感器。
50、为了更好地实现上述目的,本发明还提供了一种多耦合协同加装装置的调控方法,其中,包括如下步骤:
51、s100、分别采用超声波接近传感器检测播种施肥喷药机的种箱、固态肥箱、液态肥箱和药箱内的种/肥/药余量,并根据设定条件判断所述播种施肥喷药机是否需要补充相应的种/肥/药;若满足所述设定条件,则无需进行自动加装,若不满足所述设定条件,则按如下步骤进行自动加装;
52、s200、分别采用倾角传感器检测种仓自动补给机构、固态肥自动补给机构、液态肥自动加注机构和药液自动加注机构与对应的所述种箱、固态肥箱、液态肥箱和药箱的水平倾斜角度,并采用拉线位移传感器检测对应的空间位置调节机构的液压缸伸缩位移量,所述中央控制器根据所述液压缸伸缩位移量驱动相应的液压缸,确保所述种仓自动补给机构及固态肥自动补给机构的补料管道与对应的所述种箱和固态肥箱、所述液态肥自动加注机构和药液自动加注机构的液体加注管道与相应的所述液态肥箱及药箱保持平行;
53、s300、分别采用激光雷达传感器检测所述种仓自动补给机构和固态肥自动补给机构的仓体、所述液态肥自动加注机构和药液自动加注机构的液仓与最靠近的相应所述种箱、固态肥箱、液态肥箱及药箱之间的水平距离,并通过空间位置调节机构调整所述种仓自动补给机构及固态肥自动补给机构的补料管道与对应的所述种箱和固态肥箱、所述液态肥自动加注机构和药液自动加注机构的液体加注管道与对应的所述液态肥箱及药箱在水平方向保持精准对接;
54、s400、分别采用激光雷达传感器检测所述种仓自动补给机构及固态肥自动补给机构的补料管道与对应的所述种箱和固态肥箱、所述液态肥自动加注机构和药液自动加注机构的液体加注管道与对应的所述液态肥箱及药箱之间的垂直距离,并通过所述空间位置调节机构调整所述补料管道与对应的所述种箱及固态肥箱、所述液体加注管道与对应的所述液态肥箱及药箱之间的垂直距离,以确保垂直方向的精准对接;
55、s500、采用超声波接近传感器分别检测所述仓体的种子余量、固态肥余量、所述液仓的液态肥余量和药液余量,中央控制器控制种仓自动补给机构、气流分配器、旋转变量开关、固态肥自动补给机构、液态肥自动加注机构和药液自动加注机构开始工作;
56、s600、采用流量传感器检测所述输送管道与各个补料管道的种子流量及固态肥流量、液体输送管道与各个液体加注管道的液态肥流量及药液流量,基于步骤s100和s500检测的种/肥/药余量信息,并结合速度传感器检测驱动电机的转速和气流速度传感器检测的所述输送管道、补料管道和气流分配器的气流速度,所述中央控制器自动调控各所述驱动电机到优化工作参数组合,确保顺利执行播种/施肥/喷药多耦合协同按需加装;以及
57、s700、所述超声波接近传感器持续检测播种施肥喷药机的种箱、固态肥箱、液态肥箱和药箱内的种/肥/药余量,直至满足所述设定条件时,结束自动加装工作。
58、上述的多耦合协同加装装置的调控方法,其中,步骤s200中,进一步包括:
59、步骤s201、通过倾角传感器实时检测补料管道与种箱、补料管道与施肥机肥箱、液体加注管道与施肥机肥箱、液体加注管道与药箱两者之间的水平倾斜角度,分别记为θ1和θ2;
60、步骤s202、根据倾角传感器检测出两者之间的水平倾斜角度计算出补料管道、补料管道、液体加注管道、液体加注管道需要调整的角度θ,即θ=θ1-θ2;
61、步骤s203、根据需要调整的角度θ,驱动补种液压缸、补固态肥液压缸、液态肥加注液压缸、药液加注液压缸伸缩相应的位移,其中补料管道、补料管道、液体加注管道、液体加注管道的水平倾斜角度θ1,也就是补种滑块连杆、补固态肥滑块连杆、液态肥加注滑块连杆、药液加注滑块连杆与竖直方向的夹角,根据三角余弦定理,求得与其中θ1为补种滑块连杆、补固态肥滑块连杆、液态肥加注滑块连杆、药液加注滑块连杆与竖直方向未调整后夹角;θ1’为补种滑块连杆、补固态肥滑块连杆、液态肥加注滑块连杆、药液加注滑块连杆与竖直方向调整后夹角,也就是θ2;x0为补种滑块连杆、补固态肥滑块连杆、液态肥加注滑块连杆、药液加注滑块连杆与机架铰接点到补种液压缸、补固态肥液压缸、液态肥加注液压缸、药液加注液压缸与机架铰接点的竖直方向距离,lad;x1为补种滑块连杆、补固态肥滑块连杆、液态肥加注滑块连杆、药液加注滑块连杆与支架铰接点与补种液压缸、补固态肥液压缸、液态肥加注液压缸、药液加注液压缸与补种滑块连杆、补固态肥滑块连杆、液态肥加注滑块连杆、药液加注滑块连杆铰接点的距离,lab;y0为补种滑块连杆、补固态肥滑块连杆、液态肥加注滑块连杆、药液加注滑块连杆与机架铰接点到补种液压缸、补固态肥液压缸、液态肥加注液压缸、药液加注液压缸与补种滑块连杆、补固态肥滑块连杆、液态肥加注滑块连杆、药液加注滑块连杆铰接点的未调整距离,lcd和lbd;y1为补种滑块连杆、补固态肥滑块连杆、液态肥加注滑块连杆、药液加注滑块连杆与机架铰接点到补种液压缸、补固态肥液压缸、液态肥加注液压缸、药液加注液压缸与补种滑块连杆、补固态肥滑块连杆、液态肥加注滑块连杆、药液加注滑块连杆铰接点的调整后距离,lbd和lac;
62、求得调整角度其中y1=y0+y,y为补种液压缸、补固态肥液压缸、液态肥加注液压缸、药液加注液压缸伸缩相应的位移,为变量,而由于其它均为常数,因此可不断通过调整补种液压缸、补固态肥液压缸、液态肥加注液压缸、药液加注液压缸伸缩相应的位移达到调整补种管道与种箱、补肥管道与固态肥箱、液态肥加注管道与液态肥箱、药液加注管道与药箱水平倾斜角度保持平行的目的;
63、循环上述步骤s201-s203,确保补种管道与种箱、补固态肥管道与固态肥箱、液态肥加注管道与液态肥箱、药液加注管道与药箱水平倾斜角度保持平行。
64、上述的多耦合协同加装装置的调控方法,其中,步骤s400中,进一步包括:
65、s401,根据空间位置调节机构的凸轮盘驱动电机旋转角度θj,计算摇杆垂直方向移动的距离:
66、
67、其中r为凸轮盘的半径;s1为凸轮盘与连接杆的连接点到支撑滑块与连接杆的连接点的距离;s2为支撑滑块与连接杆的连接点到连接杆与摇杆的连接点的距离;
68、s402,根据激光雷达传感器检测的所述垂直距离,通过相应的驱动电机控制对应的支撑滑块沿连接杆的移动距离,以精准调节摇杆垂直方向的移动距离;以及
69、s403,若所述垂直距离过大,则增大s2,减少s1,加快精准对接进度;反之则减少s2,增大s1,确保垂直方向的精准对接。
70、上述的多耦合协同加装装置的调控方法,其中,步骤s600中,进一步包括:
71、步骤s601,通过编码器检测旋转变量卸种轮、旋转变量卸固态肥轮、旋转变量卸液态肥轮、旋转变量卸药液轮的转动角度信息,其中以循环时间t为检测时间间隔,采集到编码器脉冲值p(每圈脉冲数为m),并同时记录循环次数n。再初始化1个数值p1=0,上述电机开始工作,记录此时编码器脉冲值p,则转动角度最后将p赋值给p1;
72、步骤s602、旋转卸种片、旋转卸固态肥片、旋转卸液态肥片、旋转卸药液片在固定种筒、固定固态肥筒、固定液态肥筒、固定药液筒在x轴方向滑动,则其a点坐标为(r1sin(θz1+θz),c点坐标为(r2sin(θz2+θz),r2cos(θz2+θz));设b点坐标为(a,l),当旋转开关关闭时,初始值a=0,其中r1为a点到圆心o的半径;r2为c点到圆心o的半径;θz1为oa与y轴的初始角度;θz2为oc与y轴的初始角度;a为旋转卸种片、旋转卸固态肥片、旋转卸液态肥片、旋转卸药液片在固定种筒、固定固态肥筒、固定液态肥筒、固定药液筒在x轴方向滑动位移;l为旋转卸种片、旋转卸固态肥片、旋转卸液态肥片、旋转卸药液片在固定种筒、固定固态肥筒、固定液态肥筒、固定药液筒在y轴方向的位移;
73、步骤s603、根据s602步骤得到的ac坐标,得到直线ac的公式为:
74、
75、将b点坐标带入步骤s603的直线ac公式,求得旋转卸种片、旋转卸固态肥片、旋转卸液态肥片、旋转卸药液片在固定种筒、固定固态肥筒、固定液态肥筒、固定药液筒在x轴方向滑动位移a为:
76、
77、根据得到的旋转卸种片、旋转卸固态肥片、旋转卸液态肥片、旋转卸药液片在固定种筒、固定固态肥筒、固定液态肥筒、固定药液筒在x轴方向滑动位移a,可求得旋转变量卸种开关、旋转变量卸固态肥开关、旋转变量卸液态肥开关、旋转变量卸药液开关大小面积即
78、其中旋转变量卸种开关、旋转变量卸固态肥开关、旋转变量卸液态肥开关、旋转变量卸药液开关大小为正六边形;a0为旋转开关关闭时,正六边形边长的初始值;随着旋转变量卸种轮、旋转变量卸固态肥轮、旋转变量卸液态肥轮、旋转变量卸药液轮的转动,正六边形边长为(a+a0);
79、s603、由此可以求得旋转变量卸种轮、旋转变量卸固态肥轮、旋转变量卸液态肥轮、旋转变量卸药液轮的角度与旋转变量卸种开关、旋转变量卸固态肥开关、旋转变量卸液态肥开关、旋转变量卸药液开关大小面积的关系,因此可通过旋转变量卸种轮、旋转变量卸固态肥轮、旋转变量卸液态肥轮、旋转变量卸药液轮的角度控制旋转变量卸种开关、旋转变量卸固态肥开关、旋转变量卸液态肥开关、旋转变量卸药液开关大小面积,进而控制种仓输送管道与各个补料管道的种子流量、固态肥仓输送管道与各个补料管道的固态肥流量、液态肥仓输送管道与各个液体加注管道的液态肥流量、药液仓输送管道与各个液体加注管道的药液流量。
80、本发明的技术效果在于:
81、本发明以匹配播种施肥喷药机作业效率为要求,融入监测技术的控制装置,根据检测的实际工作参数,实时调节执行机构,以优化的工作参数组合自动完成加装过程,加快了播种施肥喷药机的工作进程和作业效率。播种-施肥-喷药多耦合协同按需加装调控,可根据实时检测的参数,自动调控该装置到优化工作参数组合,并规划种肥药协同加装作业,极大提升了播种-施肥-喷药多耦合协同按需加装自动化水平,填补了自动加装种肥药的空白,从根本上解决了播种施肥喷药自动加装种肥药效率低、劳动强度大、作业成本高等问题,实现了高效低损地输送种肥药,有效匹配了播种施肥喷药机器作业进度,提升了其作业效率和续航时间。其中适应不同分布和数量的播种施肥喷药的种肥药箱,也适应不同尺寸和种类的种肥药,适应范围较广;通过对补料管道与种箱、补料管道与施肥机肥箱、液体加注管道与施肥机肥箱、液体加注管道与药箱水平倾斜角度保持平行以及对各个补料管道与种箱、各个补料管道与施肥机肥箱、各个液体加注管道与施肥机肥箱、各个液体加注管道与药箱在垂直方向移动距离进行检测和计算,解决了各个补料管道与种箱、各个补料管道与施肥机肥箱、各个液体加注管道与施肥机肥箱、各个液体加注管道与药箱难以精准对接的难题;通过对转变量卸种轮、旋转变量卸固态肥轮、旋转变量卸液态肥轮、旋转变量卸药液轮的转动角度信息进行检测,以及对旋转变量卸种开关、旋转变量卸固态肥开关、旋转变量卸液态肥开关、旋转变量卸药液开关大小进行计算,实现通过旋转变量卸种轮、旋转变量卸固态肥轮、旋转变量卸液态肥轮、旋转变量卸药液轮的角度控制种仓输送管道与各个补料管道的种子流量、固态肥仓输送管道与各个补料管道的固态肥流量、液态肥仓输送管道与各个液体加注管道的液态肥流量、药液仓输送管道与各个液体加注管道的药液流量,更加精确控制其流量。
82、以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
- 还没有人留言评论。精彩留言会获得点赞!