一种打包机机头及打包方法与流程
本发明涉及打包设备领域,尤其涉及一种打包机机头及打包方法。
背景技术:
1、打包机通过控制打包带定向移动实现对货物的缠绕包装,提高货物在存储以及运输过程当中的稳定性,提高货物运输效率;打包机的打包原理大致相同,对打包带进行循环做扣,对重叠部分进行熔融切断,实现一次打包过程。
2、传统的打包机内部设置有气动、电动夹紧控制元件,其中通过控制元件对打包带的两端进行夹紧限位以及熔融切断;但是通过启动或者电动夹紧控制元件其工作力矩有限,且需要通过中央控制元件进行协调配合,整体夹紧效果差,故障率较高,打包效率受到限制;部分企业通过机械控制的方式实现对打包带的自动夹紧限位,如专利文献:一种捆扎打包机(cn112027238a),其内通过凸轮控制对应的压刀进行动作,依次实现对打包带的夹紧限位,快速有序地实现一次打包作业。
3、包括上述方案在内的方案均存在共同的问题,在传统方案当中是通过弹簧对压刀施加预紧力的作用,在凸轮错开后,弹簧工作,实现对打包带的夹紧限位;弹簧施加力的作用有限,弹簧长期工作的过程当中,弹簧施加的预紧力发生变化,对打包带夹紧的效果变差,打包带发生打滑,无法完成打包带的做扣;其次采用弹簧来施加预紧力的作用,其夹紧效果有限且无法根据打包带的厚度进行调整,对于精密设备的打包来说,其最终的打包效果存在瑕疵,不符合打包要求。
技术实现思路
1、针对上述问题,本发明提供一种打包机机头及打包方法,该发明通过杠杆作用能够对打包带施加恒定且足够的预紧力,保证对打包带的夹紧限位效果,满足打包需求。
2、为解决上述问题,本发明所采用的技术方案是:
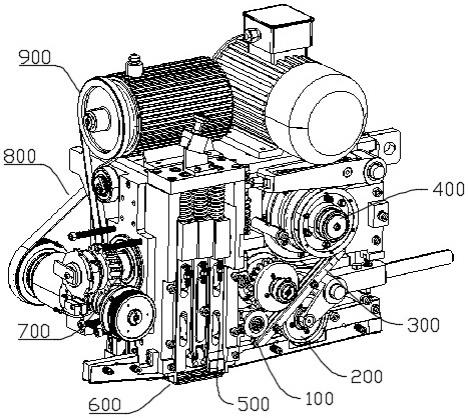
3、一种打包机机头,包括安装机架:用于安装打包设备,内部设置有杠杆控制组件;内置带导向组件:位于安装机架内侧侧壁,为打包带提供移动路径;送带装置:控制打包带定向移动;夹紧切断装置:所述夹紧切断装置位于送带装置后方,完成对打包带两端的夹紧以及切断;所述夹紧切断装置包括位于靠近送带装置一侧的夹具杠杆一、位于远离送带装置一侧的夹具杠杆二和位于夹具杠杆一以及夹具杠杆二之间的振动杠杆;通过夹具杠杆一实现对打包带第一端的夹紧限位,通过夹具杠杆二实现对打包带第二端的夹紧限位,通过振动杠杆从中间位置实现对打包带的熔融切断;凸轮控制组件:所述凸轮控制组件内置于安装机架内部,所述凸轮控制组件与杠杆控制组件相互配合控制夹具杠杆一、夹具杠杆二以及振动杠杆依次动作实现打包过程。
4、优选地,所述凸轮控制组件包括凸轮安装轴,所述凸轮安装轴第一端安装固定有涡轮组件,第二端安装固定有凸轮组,所述杠杆控制组件包括若干个控制杠杆,所述控制杠杆中间位置与安装机架转动连接,所述控制杠杆的第一端位于凸轮组的上方,所述控制杠杆的第二端与夹紧切断装置联接,凸轮组与对应的控制杠杆配合以控制夹具杠杆一、夹具杠杆二以及振动杠杆依次动作。
5、优选地,所述安装机架侧壁安装有位于夹紧切断装置下方的滑动板组件,所述滑动板组件包括第一滑动板以及第二滑动板,所述第二滑动板位于第一滑动板上方并且与之滑动连接,所述第二滑动板侧壁开有第一导向间隙,所述第二滑动板与第一滑动板之间形成第二导向间隙,其中一个控制杠杆与第二滑动板连接以控制第一滑动板以及第二滑动板线性移动,其中控制第一滑动板以及第二滑动板线性移动让第一导向间隙以及第二导向间隙与打包带错开预定间距。
6、优选地,所述夹具杠杆一、夹具杠杆二以及振动杠杆内设置有相变组件,所述相变组件包括伸缩装置,所述伸缩装置内填充有相变材料,所述夹紧切断装置外侧壁设置有控制组件。
7、优选地,所述安装机架侧壁还安装有张紧装置,所述张紧装置位于送带装置前方控制打包带张紧,所述安装机架侧壁安装有第一驱动装置用以控制张紧装置、送带装置以及凸轮控制组件协调转动。
8、优选地,所述第一驱动装置包括主输出轮、张紧驱动轮、送带驱动轮以及凸轮驱动轮,所述主输出轮、张紧驱动轮、送带驱动轮以及凸轮驱动轮之间通过第一皮带传动,所述主输出轮、张紧驱动轮、送带驱动轮以及凸轮驱动轮侧壁均安装有离合器。
9、优选地,所述安装机架侧壁安装有位于内置带导向组件一侧的计数检测组件,所述计数检测组件包括检测安装架,所述检测安装架侧壁安装有位于打包带移动路径上的计数检测轮,所述计数检测轮通过检测转轴固定连接有检测筒,所述检测筒侧壁安装有泵气管道,所述泵气管道与检测转轴轴线一致,所述检测筒内密封滑动连接有偏心控制块,所述内置带导向组件内壁固定连接有喷气气嘴,所述泵气管道末端与喷气气嘴相连通,其中计数检测轮在转动的过程当中控制偏心控制块移动让泵气管道导通最终使得喷气气嘴喷出气体。
10、优选地,所述振动杠杆底端安装有摩擦块,所述安装机架顶端安装有控制摩擦块往复移动的第二驱动装置,所述第二驱动装置包括摩擦驱动轮以及摩擦偏心轴,所述摩擦驱动轮以及摩擦偏心轴之间通过第二皮带传动,所述摩擦偏心轴末端与摩擦块之间通过摩擦连杆联接。
11、一种打包方法,s1、驱动送带:通过送带装置控制打包带经过内置带导向组件安装预定路径朝着第一方向定向移动,实现打包带的送带过程;
12、s2、一次夹紧:待s1中打包带的送带完毕后,通过凸轮控制组件控制夹具杠杆一动作,控制夹具杠杆一朝着滑动板组件方向移动实现对打包带的一次夹紧;
13、s3、张紧收带:待s2中打包带一次夹紧完毕后,通过张紧装置控制打包带朝着第二方向定向移动,实现打包带的张紧过程;
14、s4、二次夹紧:待s3中打包带张紧过程完毕后,通过凸轮控制组件控制夹具杠杆二动作,控制夹具杠杆二朝着滑动板组件方向移动,实现打包带的二次夹紧;
15、s5、摩擦熔断:待s4中打包带二次夹紧完毕后,先通过凸轮控制组件控制振动杠杆动作,控制振动杠杆朝着滑动板组件方向移动,与打包带表面相抵紧;后通过第二驱动装置控制振动杠杆内的摩擦块动作,实现对打包带的熔融切断。
16、优选地,在打包工作前,根据打包带的厚度调整控制组件的位置,让相变组件在不同的位置处实现相变以实现对不同尺寸打包带的适配夹紧。
17、本发明的有益效果为:
18、1、与传统多元件繁杂的控制方式相比较,通过凸轮控制组件依次对夹具杠杆以及振动杠杆进行控制,在凸轮转动的过程当中能够控制对应的组件依次动作,实现对打包带两端的限位夹紧,提高了整体的自动化效率,降低了整体的故障率;并且通过设置杠杆组件与凸轮组配合对夹具杠杆以及振动杠杆进行控制,取代传统的弹簧控制,其能够施加足够的预紧力,让打包带被限位得更加稳定,满足打包需求。
19、2、通过在夹具杠杆以及振动杠杆内设置有相变组件,相比组件选择为电流变液时,此时打包机能够根据打包带的厚度进行伸缩,对于不同厚度的打包带实现适配夹紧限位,也降低了动作过程中零部件的损耗;当夹具杠杆以及振动杠杆移动至预定位置后,此时通过控制组件能够控制相位变化,让夹具杠杆以及振动杠杆变为不可伸缩的整体,此时能够保证对打包带的夹紧效果,保证夹紧的稳定有效。
20、3、通过设置喷气气嘴喷出的气体一方面能够打包带施加力的作用,减小其在轨道内滑动的摩擦力,降低损耗;另外一方面能够对工作过程当中产生的碎屑进行自动清理,降低工作人员负担;通过设置检测组件能在打包带移动的过程当中自动触发检测装置,实现整体自动控制,提高了整体自动化效率,提高了打包效率。
21、4、通过各个离合器的吸附和断开来实现不同动作,通过一个电机完成多个动作,实现各个机构共用动力电机,能够合理地分布动力传递路线,减少动力电机的数量,保证打包机的结构紧凑和稳定运行,通过各个传感器实现了传动效率高和精准控制;通过在张紧离合装置上的涨紧轮上设置有规律排列的齿形结构,使得该机对于不同表面光洁度的打包带都具有极好的张紧作用,避免了在使用光面打包带时候发生打滑的现象。
- 还没有人留言评论。精彩留言会获得点赞!