发电机转子吊装对中监测系统及监测方法与流程
本发明属于转子吊装对中监测,特别涉及一种发电机转子吊装对中监测系统及监测方法。
背景技术:
1、转子为水轮发电机的重要部件,水电站水轮发电机检修过程中需要进行电机转子的吊出及回装作业,而大型水电站的水轮发电机转子通常具有很大的几何尺寸和设备吨位,其吊装作业难度高和风险大。对于大型水轮发电机组,吊装过程转子和定子间的允许间隙范围较小,吊装过程中需要保证一定的对中精度。此外,吊装过程中转子和定子一旦发生挤压和碰撞,则会造成严重的设备损坏事故。
2、现阶段对转子定位的方式为:在转子上安装距离传感器,吊装过程中,通过多个传感器测量的距离数值(定子与转子间隙距离)来判断转子是否对中。现有对中技术的缺点在于:距离传感器安装的位置与对中操作存在矛盾,无法精确地对转子进行对中监测。例如:当距离传感器安装在转子上部时,转子下部无法检查到距离信号;当距离传感器安装在转子的下部时,由于吊装点在转子的顶部,转子下部晃动厉害(晃动程度远远大于转子顶部的晃动幅度),且晃动频率没有规律,这样造成了距离传感器测量的数值跳动幅度大,无法判断吊装点是否对中。因此需要对现有转子对中监测技术进行改进。
技术实现思路
1、鉴于背景技术所存在的技术问题,本发明所提供的发电机转子吊装对中监测系统及监测方法,解决了距离传感器的弊端,通过对中监测装置和对中靶标装置可实时测量转子吊装过程中位姿,能有效实时指导吊机进行定量操作。
2、为了解决上述技术问题,本发明采取了如下技术方案来实现:
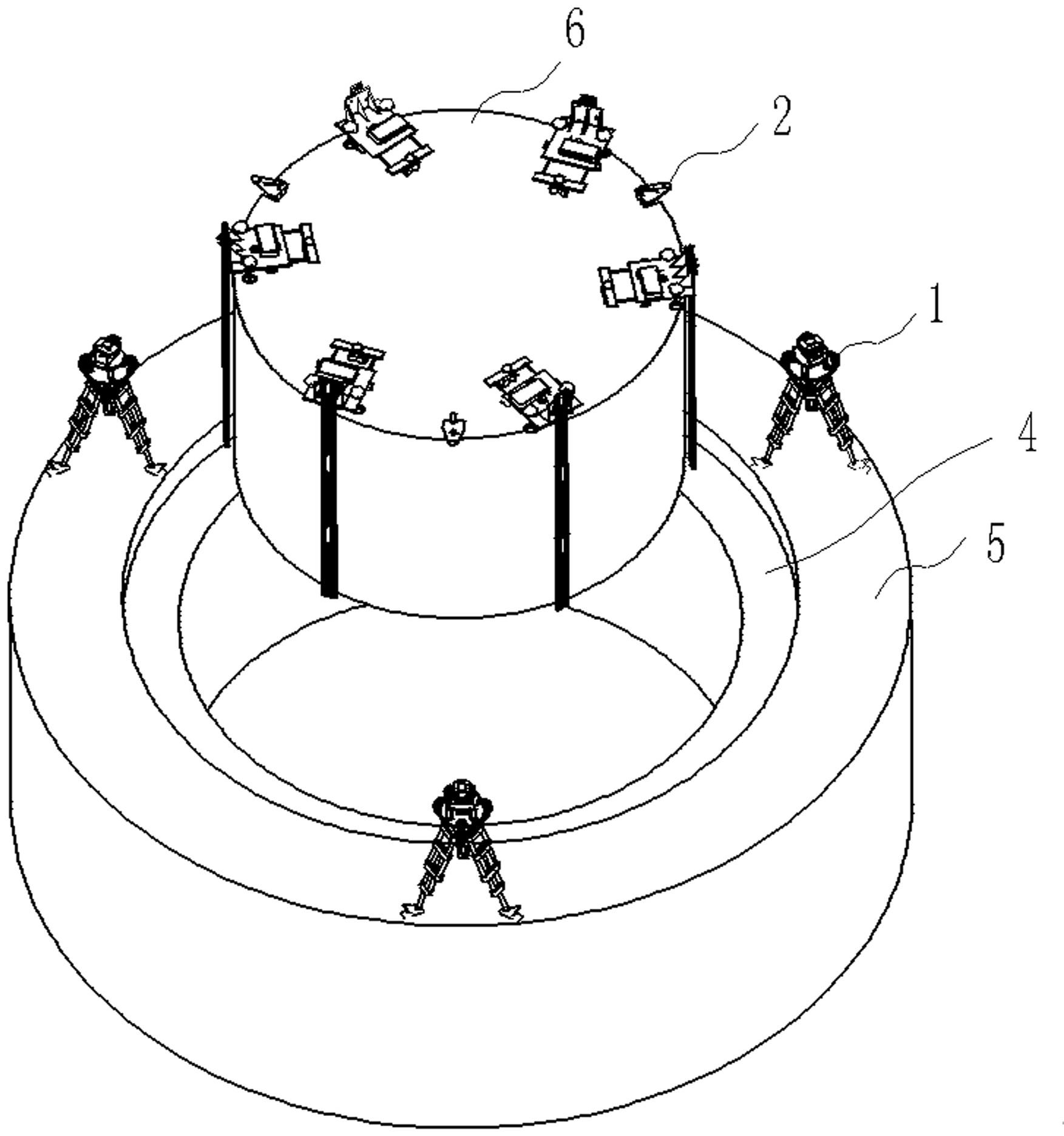
3、一种发电机转子吊装对中监测系统及监测方法,包括对中监测装置和对中靶标装置,对中监测装置的数量有多个,多个对中监测装置沿着定子周向布设;对中靶标装置的数量与对中监测装置的数量相对应,每一台对中靶标装置与一台对中监测装置相适配,多个对中靶标装置沿转子外沿周向安装于转子上端面;对中监测装置用于架设在定子上基面或吊装作业平台上。
4、优选的方案中,所述的对中监测装置包括三脚架,三脚架顶部设有全站仪基座,全站仪基座上设有底板,底板上设有水平仪、点激光发射器和转台座,转台座上安装有回转电机,回转电机用于驱动转架转动,转架上安装有俯仰电机,俯仰电机通过转轴连接并驱动激光测距仪进行俯仰动作,激光测距仪上安装有倾角传感器。
5、优选的方案中,所述的全站仪基座和底板中心设有通孔,所述的通孔用于点激光发射器所发射激光束通过,全站仪基座和底板之间设有脚螺旋。
6、优选的方案中,所述的对中靶标装置包括靶标板、球形反射靶、靶标磁吸座和十字线激光发射器;所述靶标板为透光材质,靶标板设有十字标,靶标板一端安装有球形反射靶,靶标板另一端下侧安装有靶标磁吸座,靶标板上侧安装十字线激光发射器。
7、优选的方案中,所述的十字线激光发射器所发射激光束为可视十字线激光束,十字线激光束与十字标重合,且竖直方向的激光束垂直于靶标板板面且过球形反射靶球心;十字线激光束水平方向激光束与转子外沿相切。
8、优选的方案中,所述的多台对中靶标装置安装高度相同,球形反射靶伸出与转子外沿。
9、一种发电机转子吊装对中监测系统的监测方法,包括以下步骤:
10、步骤1,架设对中监测装置:将多个对中监测装置架设在定子上基面或吊装作业平台上,架设时通过观察水平仪,先通过三脚架进行对中监测装置粗调平,随后通过全站仪基座上的脚螺旋进行对中监测装置精调平。
11、步骤2,标定对中监测装置回转角:通过控制回转电机和俯仰电机,使激光测距仪发射的测距激光束照射于定子内沿上,并使激光测距仪测到最大值,此时标定当前回转电机所在位置为零位即回转角为0;
12、步骤3,标定对中监测装置:
13、情况一,若对中监测装置架设于定子上基面或吊装作业平台上已有经测量和标记有精确坐标的固定点位,则对所有架设的对中监测装置执行步骤2;
14、情况二,若对中监测装置架设于定子上基面或吊装作业平台上任意点位,则现选定其中一架对中监测装置执行步骤2,然后通过控制回转电机和俯仰电机,使激光测距仪发射的测距激光束照射于另一架对中监测装置安装点位上;
15、步骤4,转子位姿校平:通过控制回转电机和俯仰电机,使激光测距仪发射的测距激光束照射于对应的对中靶标装置上的球形反射靶球面,使测距激光束垂直于球形反射靶球面,即在球形反射靶球面呈现点激光斑,此时,根据激光测距仪所测数据以及倾角传感器所测俯仰电机俯仰角 α,结合步骤2中所得激光测距仪测头与定子上端面相对高差,即可求得当前所测对中靶标装置上的球形反射靶球心距离定子上端面相对高差,通过测得多个点位对中靶标装置上的球形反射靶球心距离定子上端面相对高差,将各点高差反馈给吊装操作人员,则可明确此时转子端面与定子端面的倾斜情况,通过调整,当测得多个点位对中靶标装置上的球形反射靶球心距离定子上端面相对高差一致时,转子位姿校平,即此时转子轴心与定子轴心平行。
16、步骤5,转子和定子对中:通过控制回转电机和俯仰电机,使激光测距仪发射的测距激光束照射于对应的对中靶标装置上的球形反射靶球面,使测距激光束垂直于球形反射靶球面,即在球形反射靶球面呈现点激光斑,此时,根据激光测距仪所测数据以及回转电机回转角 β,即可求得当前所测对中靶标装置上的球形反射靶球心于吊装俯视平面的坐标,由于在吊装俯视平面上,不同点位对中靶标装置上的球形反射靶球心所在圆的圆心坐标位置即转子轴线于吊装俯视平面的坐标位置,因此当求得所有对中靶标装置上的球形反射靶球心于吊装俯视平面的坐标,即可知道转子轴线在吊装俯视平面的坐标位置,结合步骤3取得的定子轴线在吊装俯视平面的坐标位置,即可定量指导吊装作业人员调整起吊机移动量;
17、步骤6,对中监测作业:完成转子和定子对中后,转子开始吊装作业,在任意时刻和位置,重复步骤4和步骤5即可对转子位姿进行实时监控。
18、优选地,步骤二的标定方法为:设对中监测装置架设点位为a点,当激光测距仪测到最大值时,此时测距激光束照射于定子内沿b点上,则ab必过定子的轴线,此时以对中监测装置架设点位a点为坐标原点,则根据激光测距仪所测值以及倾角传感器所测俯仰电机俯仰角 α,即可在吊装俯视平面确定定子内沿上b点坐标,以及激光测距仪测头与定子上端面相对高差。
19、优选地,步骤三中,对中监测装置的数量至少为三个,第三个对中监测装置架设的地点设为c,则测距激光束照射于定子内沿d点上;a点架设对中监测装置所发射测距激光束和c点架设对中监测装置所发射垂准激光束光斑点重合,此时通过a点架设对中监测装置激光测距仪所测值、倾角传感器所测俯仰电机俯仰角α以及回转电机回转角β,即可在吊装俯视平面确定c点相对a点坐标,重复上述步骤则可在吊装俯视平面确定其余对中监测装置架设点相对a点坐标,然后重复步骤3,情况一时的操作,则可确定定子轴线于吊装俯视平面的坐标。
20、本专利可达到以下有益效果:
21、本发明通过对中监测装置和对中靶标装置可实时测量转子吊装过程中位姿,能有效实时指导吊机进行定量操作。相比较于现有技术,本发明在吊装的任何位置均可以实现实时对中监测,不会受到转子底部晃动的干扰,有效解决了距离传感器带来的弊端,对中效果更准确。
- 还没有人留言评论。精彩留言会获得点赞!