码垛机的制作方法
本发明涉及电池包装设备,尤其涉及对电池进行码垛打包的码垛机。
背景技术:
1、蓄电池作为一种能将电能储存为化学能,需要放电时再次把化学能转换成电能的装置,被广泛运用于汽车电池和电瓶车电池等领域,由于蓄电池自身特性,在组装完成后,需稳妥包装后方能安全运输,其中,为了实现更好的防震保护的目地,则涉及到将电池先安置于泡沫盘中,并对载满电池的泡沫盘进行码垛,再根据需要装入到包装箱中。现有生产中,常常是通过人工对电池进行码垛打包,耗时长,劳动强度大,工作效率低,且人工作业还存在码垛用力不均而损坏电池内部电芯的问题,存在一定的安全隐患,虽然也有采用码垛机对电池进行自动码垛包装,但现有的码垛机工作效率相对低,码垛效果无法有效保证,且无法有效适应对不同规格尺寸的电池进行码垛作业。如专利cn202021137034.2公开的蓄电池自动码垛机中,夹持机构在起升机构与第二传送机构的驱使下上下移动及水平移动,并通过转动,将第一传送机构上的电池夹取并码垛在托盘上,每次只能对一个电池进行码垛,效率低,且用于夹持电池的夹持槽的大小是固定的,无法有效适应对不同的电池的码垛作业,且直接对各电池进行码垛,彼此间未隔离保护,因而无法有效防止碰撞问题,存在安全隐患。
2、因此,需要一种结构简单、工作效率高且适应性强的码垛机来克服上述问题。
技术实现思路
1、本发明的目的是提供一种结构简单、工作效率高且适应性强的码垛机。
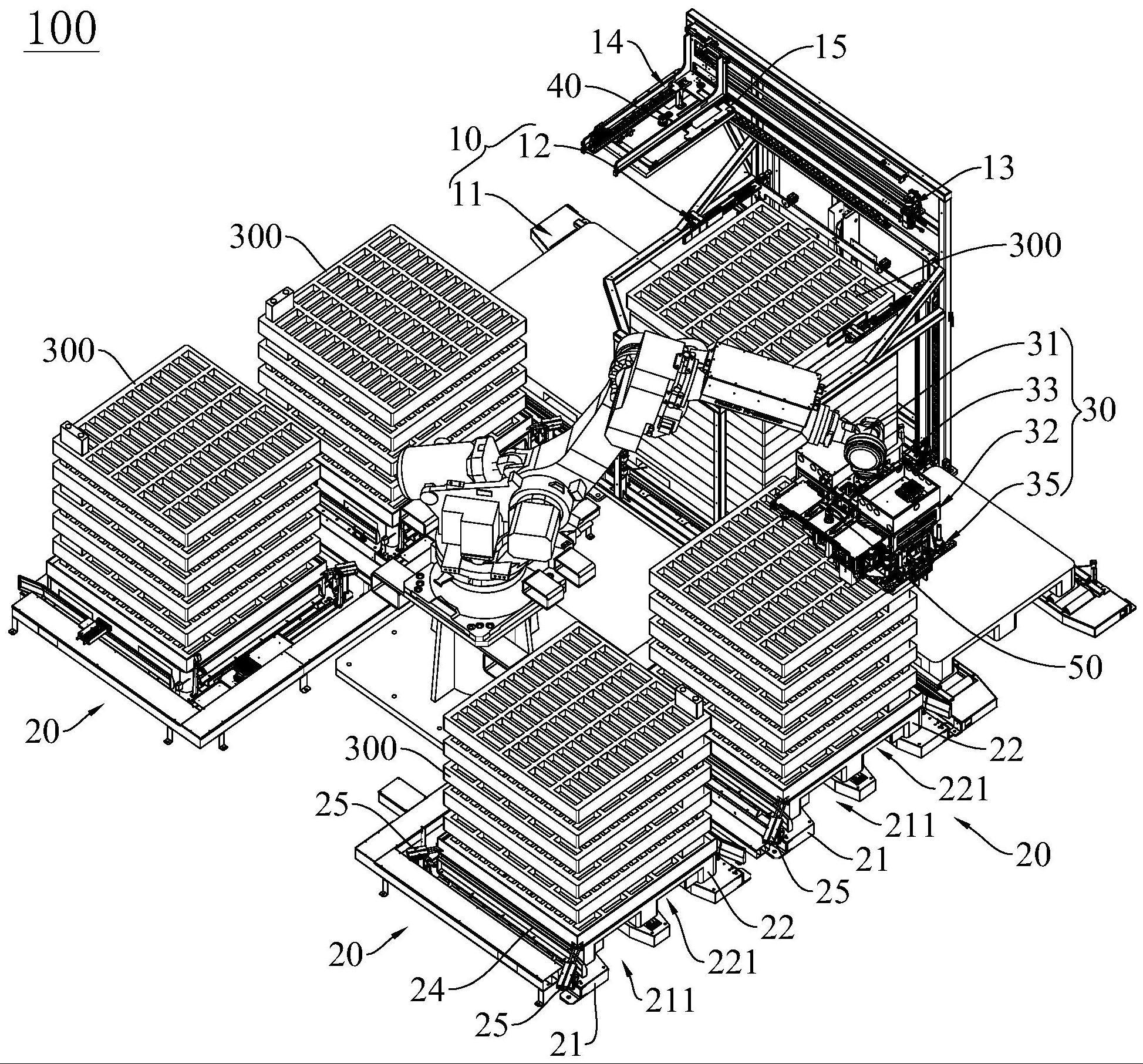
2、为了实现上述目的,本发明公开了一种码垛机,其包括供盘装置、布置于所述供盘装置旁侧的多个码垛台及布置于所述供盘装置与各所述码垛台之间的机器人,所述机器人包括连接于机械臂末端的安装架、安设于所述安装架的相对上侧端的变间距机构、连接于所述变间距机构的输出端的多个夹取单元以及安设于所述安装架的相对下侧端的夹持装置,所述供盘装置用于将成叠的空的泡沫盘传送到所述机器人处,所述码垛台用于承接空的泡沫盘及电池,所述机械臂用于驱使所述夹持装置与所述夹取单元移动及转动,使得所述夹持装置将所述供盘装置处的所述泡沫盘逐个地取放到对应的所述码垛台上,使得多个所述夹取单元每次将多个电池同步取放到所述码垛台上的泡沫盘中,所述变间距机构用于调整各所述夹取单元间的间距,所述夹持装置还依次将空的所述泡沫盘码垛于装满电池的所述泡沫盘上,直至达到预设的码垛层数,且所述夹持装置还能够从上方抵压所述泡沫盘以调整所述泡沫盘的平整度。
3、较佳地,所述供盘装置包括输送线及架设于输送线上的定位机构,所述定位机构能够相对所述输送线上下移动,以从周侧对成叠的所述泡沫盘中位于第二层的所述泡沫盘进行夹持固定。
4、较佳地,所述码垛台包括底托、安置于所述底托上的托板及布置于所述底托周侧的抵推块,所述底托远离所述机器人的一侧开设有插接口,所述托板用于承接所述泡沫盘,且所述托板的底部具有与所述插接口相对应的插槽,所述抵推块用于对所述托板或/和位于最底层的所述泡沫板进行对位调整及定位。
5、较佳地,所述夹持装置包括侧架、整形气缸、整形块、取盘气缸及取盘夹爪,两所述侧架呈对称地安设于所述安装架的左右两相对侧,两所述整形气缸一一对应地安设于两所述侧架的上侧端,每一所述侧架的下侧端的前后两端呈对称地布置有两所述整形块,两所述取盘气缸一一对应地布置于所述两侧架的下侧端的中心位置处、且同侧的所述整形块与所述取盘气缸分别与同侧的所述整形气缸连接,两取盘夹爪一一对应地连接于两所述取盘气缸的输出端,所述整形气缸用于驱使两所述整形块与所述取盘夹爪上下移动,使得所述整形块对所述泡沫盘的平整度进行调整,使得所述取盘夹爪能够在所述取盘气缸的驱使下对所述泡沫盘进行夹取。
6、较佳地,所述变间距机构包括变距气缸与连接于所述变距气缸的输出端的驱动板,所述变距气缸安设于所述安装架的上侧端,所述安装架的相对上侧端还具有沿前后方向布置的横向直线导轨,所述驱动板滑设于所述横向直线导轨上,且所述驱动板上具有多个沿前后方向呈倾斜地布置的斜槽孔,所述斜槽孔与所述夹取单元呈一一对应地布置。
7、较佳地,多个所述斜槽孔两两为一组的以所述驱动板的中心抽为中心呈对称地布置。
8、较佳地,所述夹取单元包括一一对应地布置的联动组件、升降气缸、取料气缸及取料夹爪,所述联动组件的上侧端滑设于所述安装架的沿左右方向布置的纵向直线导轨上,且与上方的所述变间距机构可滑动地卡接,所述升降气缸连接于所述联动组件的下侧端,所述取料气缸连接于所述升降气缸的输出端,所述取料夹爪连接于所述取料气缸的输出端,所述升降气缸用于驱使所述取料夹爪上下移动,所述取料气缸用于驱使所述取料夹爪夹取电池,所述联动组件用于带动所述取料夹爪于所述纵向直线导轨上滑动。
9、较佳地,所述联动组件包括导向轮、滑接板、导向杆及连接板,两所述纵向直线导轨呈对称地布置于所述安装架的前后两相对侧,所述变间距机构具有沿前后方向滑设于所述安装架的上侧端的驱动板,所述连接板沿前后方向布置于所述安装架的下方,两所述导向杆呈对称地穿置于所述连接板的前后两相对侧,且两所述导向杆的顶侧端还与上方的所述滑接板的前后两底壁一一对应地连接,所述滑接板沿前后方向穿置于所述安装架与所述驱动板之间,且所述滑接板的前后两侧壁一一对应地滑设于两所述纵向直线导轨上,所述导向轮凸设于所述滑接板的顶侧端的中心位置处,且可滑动地卡接于所述驱动板的斜槽孔中。所述升降气缸安设于所述连接板上。
10、较佳地,所述机器人还包括托载机构,所述托载机构可移动地且可转动地安设于所述安装架的前侧端或/和后侧端,用于从前侧或/和后侧对夹持于各所述夹取单元的电池的底部进行托载。
11、较佳地,所述码垛机还包括第一工业相机与第二工业相机,所述第一工业相机可移动地架设于所述供盘装置的顶侧端,用于对所述供盘装置处的泡沫盘的位置坐标进行识别,所述第二工业相机安设于所述安装架上,用于对所述电池的位置坐标及所述码垛台上泡沫盘的位置坐标进行识别。
12、与现有技术相比,本发明公开的码垛机中,机器人布置于供盘装置与各码垛台之间,机器人包括连接于机械臂末端的安装架、安设于安装架的相对上侧端的变间距机构、连接于变间距机构的输出端的多个夹取单元以及安设于安装架的相对下侧端的夹持装置,供盘装置每次对成叠的泡沫盘进行传送,有效提高供盘效率,而多码垛台的设置则可适应对不同规格尺寸的泡沫盘及对应的电池的承载及定位,当机械臂驱使夹持装置与夹取单元移动及转动以往返于供盘装置、各码垛台及电池取放位之间时,运动的夹持装置可将供盘装置处成叠的泡沫盘逐个地取放到对应的码垛台上,从而便于多个夹取单元每次将多个电池同步取放到码垛台上的泡沫盘中,有效提高单次取放效率,进而提高整个码垛作业的工作效率,当该泡沫盘装满后,夹持装置还依次将空的泡沫盘码垛于装满电池的泡沫盘上以供电池继续安置,从而通过简单的重复作业,达到预设的码垛层数,且在码垛过程中,可通过变间距机构调整各所述夹取单元间的间距,从而适应对不同规格的电池的码垛作业,另外,夹持装置还能够从上方抵压泡沫盘以调整泡沫盘的平整度,从而有效保证电池码垛作业的精度及效率,本发明的码垛机整体结构简单,布局合理且紧凑,码垛效率高且适应性强。
- 还没有人留言评论。精彩留言会获得点赞!