一种储能集装箱吊装机械的控制系统及控制方法与流程
本发明涉及吊装机械控制系统,尤其涉及一种储能集装箱吊装机械的控制系统及控制方法。
背景技术:
1、在应对全球气候变化以及我国双碳目标的共同推动下,清洁能源逐渐备受青睐。清洁能源如风力发电是在高山、海岛等地区风力强劲地区,利用风的动能带动风力发电机组再将其转换成电能。而风力发电的叶片则需要汽车吊这类吊装机械吊装至指定位置才能发挥作用。此外,新能源存在时空上分布不均匀的现象,储能集装箱恰可以克服新能源间歇性和波动性的缺陷,汽车吊也已成为储能集装箱的主要装卸设备。
2、随着纯电动汽车的商业化,纯电动汽车吊也已广受关注,汽车吊起升/下降频繁而且瞬时功率较大,对于目前已有的纯电动汽车吊,不仅存在对电网的严重冲击,而且当汽车吊工作时,吊具抓取重物下降、以及汽车吊行驶制动时,由于质量、行程大,产生较大的势能,若不及时进行回收利用,会有较大的能量损失和浪费。利用混合储能系统进行驱动以及负载下降和汽车刹车时能量回收一体化的纯电动汽车吊,目前仍是空白。
技术实现思路
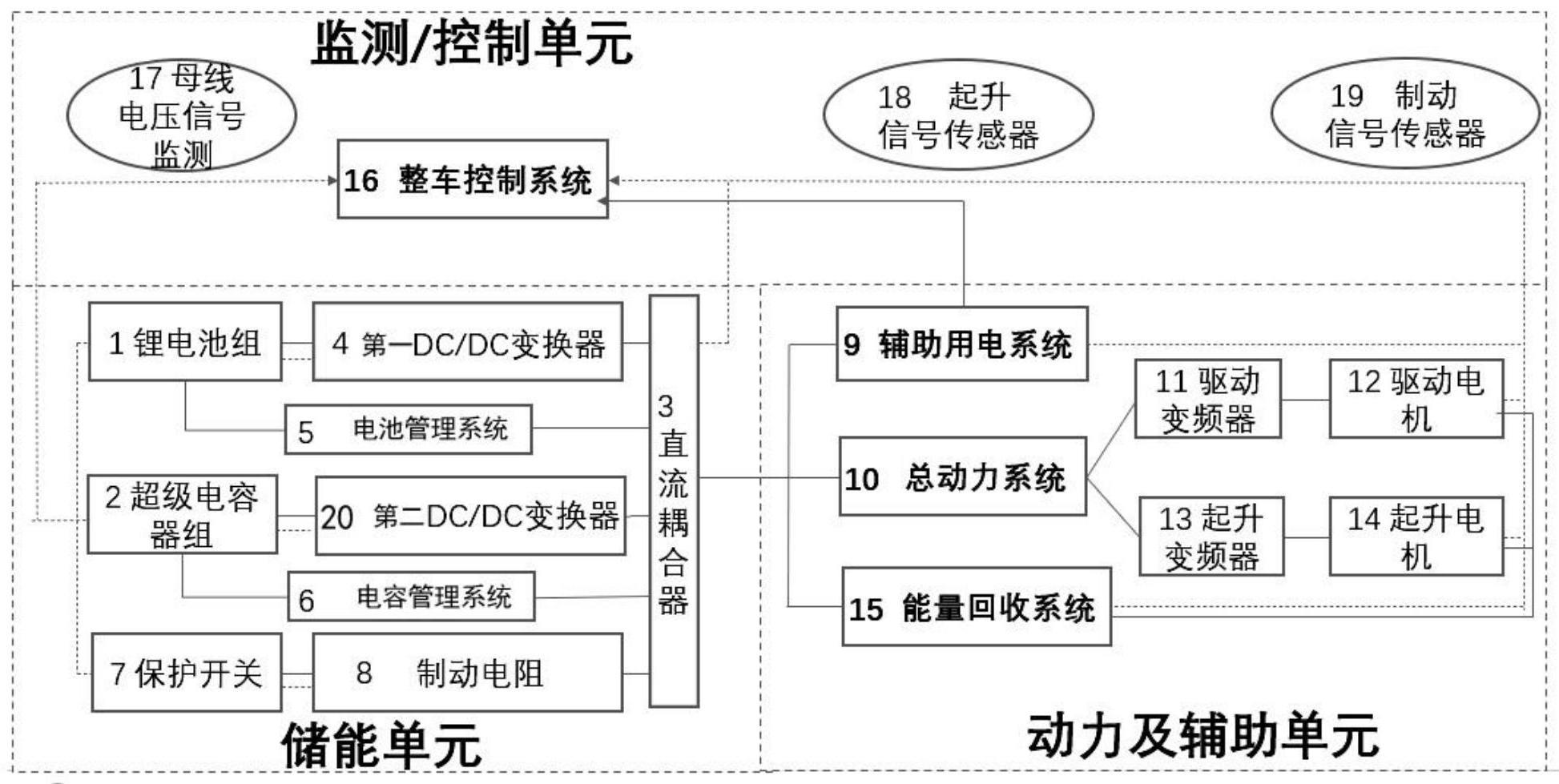
1、本发明实施例第一方面提供一种储能集装箱吊装机械的控制系统,所述控制系统包括:
2、储能单元,所述储能单元包括电池组、电池组管理系统、直流耦合器、保护开关和制动电阻,所述电池组与所述电池组管理系统直接或间接连接后与所述直流耦合器连接,所述制动电阻串联所述保护开关后与所述直流耦合器连接;
3、所述储能单元能够为所述储能集装箱吊装机械供给作业所需的动力;
4、动力及辅助单元,所述动力及辅助单元包括辅助用电系统、总动力系统和能量回收系统,所述辅助用电系统、所述总动力系统和所述能量回收系统分别连接于所述直流耦合器;
5、所述动力及辅助单元为所述储能集装箱吊装机械的工作单元;
6、监测控制单元,所述监测控制单元包括整车控制系统和信号传感器,所述整车控制系统分别与所述储能单元和所述动力及辅助单元连接;
7、所述监测控制单元能够对所述储能集装箱吊装机械进行能量调度与监控,并对其进行控制。
8、在一种可选的方案中,所述电池组包括:锂电池组、超级电容器组、第一dc/dc变换器和第二dc/dc变换器;所述电池组管理系统包括电池控制系统和电容控制系统;
9、所述锂电池组与所述第一dc/dc变换器相连,经所述电池控制系统后连接到所述直流耦合器,所述超级电容器组与所述第二dc/dc变换器相连,经所述电容控制系统后连接到所述直流耦合器。
10、在一种可选的方案中,所述动力及辅助单元还包括:驱动变频器、起升变频器、驱动电机和起升电机;
11、所述总动力系统分别与所述驱动变频器和所述起升变频器连接,所述驱动变频器与所述驱动电机连接,所述起升变频器与所述起升电机连接,所述驱动电机和所述起升电机分别与所述能量回收系统连接。
12、在一种可选的方案中,所述锂电池组为磷酸铁锂电池组,由多个电池单体串/并联而成,总容量为160~200kwh;
13、所述超级电容器组为锂离子电容器组,所述锂离子电容器组由多个24v-10000f模组16串1并组成。
14、在一种可选的方案中,所述信号传感器包括母线电压信号监测传感器、起升信号传感器和制动信号传感器。
15、本发明实施例另一方面提供一种控制系统的控制方法,其中,所述控制系统为上述实施例中的控制系统,所述控制方法包括以下步骤:
16、采集母线电压信号监测传感器、起升信号传感器和制动信号传感器的数据信息,确定车辆状态;
17、根据车辆状态对所述控制系统进行控制,具体包括:
18、(1)判断起升电机转矩t,如t=0,判断车速,如车速大于0,则进行刹车踏板信号量的采集,如刹车踏板信号量大于刹车踏板传感器的初始值d,再进行车速的判断,若车速大于v,v为开启制动能量回收的下限车速,则进行制动能量回收;
19、(2)判断起升电机转矩t,如t=0,判断车速,如车速大于0,则进行刹车踏板信号量的采集,如采集到刹车踏板信号量不大于制动传感器的初始值s,则控制仅由锂电池组供电,第二dc/dc变换器关闭,停止超级电容组放电;
20、(3)定义起升电机的转速为n,n>0,集装箱处于下降状态;n<0,集装箱处于起升状态;
21、判断起升电机转矩t,如t>0,采集到的起升电机转速n>0,则进行集装箱势能回收,关闭控制锂电池组的第一dc/dc变换器,产生的大电流能量回馈给超级电容组充电;
22、(4)如采集到的起升电机转速n<0,此时集装箱处于起吊上升状态,在起吊上升状态时,所述控制系统根据吊装机械的工作情况由锂电池组独立供电,或由锂电池组和超级电容组共同供电。
23、在一种可选的方案中,所述控制系统在起吊上升状态时具有第一工作状态和第二工作状态;
24、所述第一工作状态在吊装机械处于稳定用电工况时运行,由锂电池组独立供电;所述第二工作状态在吊装机械处于突然起升状况时运行,由锂电池组和超级电容组共同供电。
25、在一种可选的方案中,定义锂电池组的荷电状态为socb,超级电容组的荷电状态为socc,直流公用母线电压为ubus,超级电容组启动放电提供功率补偿时的直流公用母线电压阈值为ubus-low,超级电容组启动充电回收再生能量时的直流公用母线电压阈值为ubus-high;
26、在所述第一工作状态时,根据母线电压信号监测数据,在ubus≥ubus-low时,未达到超级电容组启动放电提供功率补偿时的直流公用母线电压阈值,锂电池组的荷电状态socb≥10%时,第二dc/dc变换器关闭,超级电容组不参与工作,由锂电池组提供全部能量;socb<10%时,紧急控制吊装机械停止工作,以防止锂电池组过放损坏;当socb≤35%时,锂电池组能量管理系统bms充电开启,控制双向第一dc/dc变换器使锂电池组充电直至socb≥95%;
27、在所述第二工作状态时,根据母线电压信号监测数据,在ubus<ubus-low时,若超级电容组的荷电状态socc≥90%,超级电容提供补偿功率,保障锂电池组可以<0.5c的稳定电流放电,与锂电池组共同供电;若超级电容组的荷电状态socc<10%时,超级电容组能量管理系统开启充电,控制第二dc/dc变换器将超级电容组充电直至socc≥20%,控制超级电容组socc在一定范围内,以保证超级电容组至少具备一次起升时的功率补偿或一次下降时再生能量的回收能力。
28、在一种可选的方案中,所述步骤(1)中,进行制动能量回收还包括:
29、在初期车速较高,回收电流大时,关闭控制锂电池组的第一dc/dc变换器,大电流能量回馈只给超级电容组充电;如超级电容组充满电,即cms的soc≥95%时还存在可回收制动能量,再打开第一dc/dc变换器给电池系统充电,通过第一dc/dc变换器调节电池系统充电电流,使其在锂电池系统最大允许充电电流之下;当电池系统充满电,即bms的soc≥95%时,关闭能量回收,避免电池和超级电容过充。
30、在一种可选的方案中,所述步骤(3)中,给超级电容组充电还包括:
31、超级电容充满电,即cms的soc≥99%时还存在可回收势能,打开第一dc/dc变换器给电池系统充电,通过第一dc/dc变换器调节电池系统充电电流,使其在锂电池系统最大允许充电电流之下;当电池系统也充满电,即bms的soc≥95%时,关闭能量回收,避免电池组和超级电容组过充。
32、本发明实施例的有益效果在于:
33、本发明实施例中,当吊装机械起升机构起吊或下降时,在控制系统控制下,由超级电容模组与锂电池模组构成的混合储能装置释放或吸收储能集装箱重力势能转化而来的电能;
34、混合储能装置具有独立的控制保护系统,可自由切换充放电,在锂电池模组添加dc/dc变换器起到电流调节的作用,确保回收再生能量时锂电池组充电电流在系统最大允许充电电流之下;
35、利用锂电池模组高比能量的特性,使吊装机械具备长时间转场作业能力,利用超级电容模组高比功率、长寿命特性,在起升机构起吊时提供短时高功率支撑,下降及汽车制动时优先承担再生、制动功率,有效降低锂电池模组充放电功率与频次,延长系统整体寿命;
36、锂电池组连接dc-dc变换器经过直流耦合器接入公用直流母线,直接在直流侧与超级电容组耦合,省去了在电池直流输出端利用pcs储能变流器直流变交流经过升压变压器最后通过整流器交流变直流接入直流母线的复杂过程,直流耦合方案系统简洁更经济且能量损耗低。
37、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本发明。
- 还没有人留言评论。精彩留言会获得点赞!