矿区作业的装载方法、装置、电子设备及存储介质与流程
本公开涉及无人驾驶,尤其涉及矿区作业的装载方法、装置、电子设备及存储介质。
背景技术:
1、当前矿区无人驾驶业务中,矿用作业主要包括采、运、排三个环节。其中“采”表示挖掘采集物料过程,需要挖掘机和运输车配合完成;“运”和“排”分别表示物料运输和物料卸载的过程,可以由运输车单独完成。
2、相关技术的挖掘机装载物料过程中,通常需要通过配置在挖掘机和运输车的惯导设备,完成对两车位置或车姿的调整,以便挖掘机的铲斗中的装载物的落点处于运输车车斗的区域内。然而,由于惯导设备通常会存在一定的定位误差,且定位误差会随时间增大,造成长期精度差的缺陷,不能准确的确定车斗的区域位置,导致装载作业中的作业效率受到很大影响。
技术实现思路
1、本公开提供了一种矿区作业的装载方法、装置、电子设备及存储介质。
2、根据本公开的第一方面,提供了一种矿区作业的装载方法,所述方法包括:
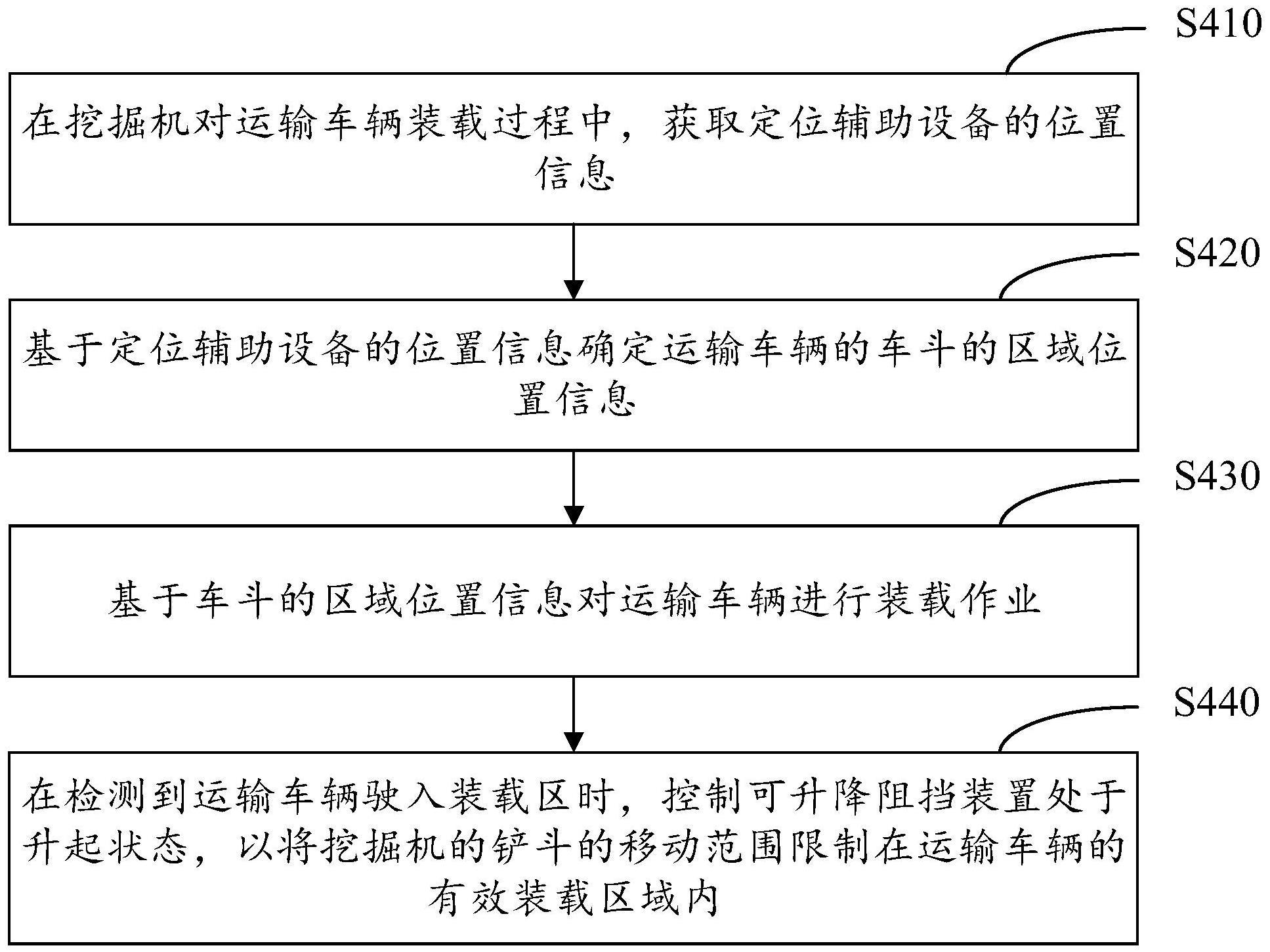
3、在挖掘机对运输车辆装载过程中,获取定位辅助设备的位置信息;其中,所述定位辅助设备设置在所述运输车辆的车斗的边界;
4、基于所述定位辅助设备的位置信息确定所述运输车辆的车斗的区域位置信息;
5、基于所述车斗的区域位置信息对所述运输车辆进行装载作业;
6、在检测到所述运输车辆驶入装载区时,控制可升降阻挡装置处于升起状态,以将挖掘机的铲斗的移动范围限制在运输车辆的有效装载区域内;其中,所述定位辅助设备包括可升降阻挡装置,所述可升降阻挡装置升起的高度大于预设高度。
7、可选地,所述可升降阻挡装置设置在所述车斗的目标侧;所述获取定位辅助设备的位置信息,包括:
8、旋转所述挖掘机的铲臂;其中,所述铲臂在旋转的过程中经过所述车斗的上方至少一部分,且与所述铲臂连接的铲斗的高度不大于所述预设高度;
9、在所述挖掘机与所述可升降阻挡装置接触时,获取接触部位的位置信息,并将所述接触部位的位置信息作为所述定位辅助设备的位置信息。
10、可选地,所述运输车辆的车身方向与所述挖掘机的车身方向相同;所述基于所述定位辅助设备的位置信息确定所述运输车辆的车斗的区域位置信息,包括:
11、获取所述车斗的参数信息,所述参数信息包括所述车斗的宽度;
12、基于所述参数信息和所述定位辅助设备的位置信息,确定所述车斗的区域位置信息。
13、可选地,所述定位辅助设备包括定位传感器;所述基于所述车斗的区域位置信息对所述运输车辆进行装载作业,包括:
14、基于所述定位传感器的位置信息,确定所述挖掘机的目标装载位置;其中,所述目标装载位置位于以所述定位传感器所在的位置为中心的预设范围内的区域;
15、在所述目标装载位置对所述运输车辆进行装载作业。
16、可选地,所述定位辅助设备包括分别设置在所述车斗四个角上的测距传感器,所述定位辅助设备的位置信息包括所述车斗四个角上的测距传感器分别对应的位置信息。
17、可选地,所述基于所述车斗的区域位置信息对所述运输车辆进行装载作业,包括:
18、根据车斗的区域位置信息,将所述车斗的区域划分为多个子区域;
19、分别对所述多个子区域进行装载作业。
20、可选地,所述方法还包括:
21、在所述挖掘机移动的距离大于预设距离时,向所述运输车辆发送位置更新信息;
22、在检测到所述运输车辆基于所述位置更新信息完成移动时,重新获取所述车斗的区域位置信息,并基于所述重新获取到的所述车斗的区域位置信息对所述运输车辆进行装载作业。
23、根据本公开的第二方面,提供了一种矿区作业的装载装置,所述装置包括:
24、第一位置信息获取模块,用于在挖掘机对运输车辆装载过程中,获取定位辅助设备的位置信息;其中,所述定位辅助设备设置在所述运输车辆的车斗的边界;
25、第二位置信息获取模块,用于基于所述定位辅助设备的位置信息确定所述运输车辆的车斗的区域位置信息;
26、作业模块,用于基于所述车斗的区域位置信息对所述运输车辆进行装载作业;
27、控制模块,用于在检测到所述运输车辆驶入装载区时,控制可升降阻挡装置处于升起状态,以将挖掘机的铲斗的移动范围限制在运输车辆的有效装载区域内;其中,所述定位辅助设备包括可升降阻挡装置,所述阻挡装置升起的高度大于预设高度。
28、可选地,所述可升降阻挡装置设置在所述车斗的目标侧;所述第一位置信息获取模块,具体用于:
29、旋转所述挖掘机的铲臂;其中,所述铲臂在旋转的过程中经过所述车斗的上方至少一部分,且与所述铲臂连接的铲斗的高度不大于所述预设高度;
30、在所述挖掘机与所述可升降阻挡装置接触时,获取接触部位的位置信息,并将所述接触部位的位置信息作为所述定位辅助设备的位置信息。
31、可选地,所述运输车辆的车身方向与所述挖掘机的车身方向相同;所述第二位置信息获取模块,具体还用于:
32、获取所述车斗的参数信息,所述参数信息包括所述车斗的宽度;
33、基于所述参数信息和所述定位辅助设备的位置信息,确定所述车斗的区域位置信息。
34、可选地,所述定位辅助设备包括定位传感器;所述作业模块,具体还用于:
35、基于所述定位传感器的位置信息,确定所述挖掘机的目标装载位置;其中,所述目标装载位置位于以所述定位传感器所在的位置为中心的预设范围内的区域;
36、在所述目标装载位置对所述运输车辆进行装载作业。
37、可选地,所述定位辅助设备包括分别设置在所述车斗四个角上的测距传感器,所述定位辅助设备的位置信息包括所述车斗四个角上的测距传感器分别对应的位置信息。
38、可选地,所述作业模块,具体还用于:
39、根据车斗的区域位置信息,将所述车斗的区域划分为多个子区域;
40、分别对所述多个子区域进行装载作业。
41、可选地,所述矿区作业的装载装置还包括:
42、信息发送模块,用于在所述挖掘机移动的距离大于预设距离时,向所述运输车辆发送位置更新信息;
43、处理模块,用于在检测到所述运输车辆基于所述位置更新信息完成移动时,重新获取所述车斗的区域位置信息,并基于所述重新获取到的所述车斗的区域位置信息对所述运输车辆进行装载作业。
44、根据本公开的第三方面,提供了一种电子设备。该电子设备包括:存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现如以上所述的方法。
45、根据本公开的第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现本公开的上述方法。
46、本公开实施例提供的矿区作业的装载方法、装置、电子设备及存储介质,在挖掘机对运输车辆装载过程中,通过获取定位辅助设备的位置信息,并基于该定位辅助设备的位置信息来确定运输车辆的车斗的区域位置信息,进而通过该车斗的区域位置信息来对运输车辆进行装载作业;定位辅助设备可以包括可升降阻挡装置,并且在检测到运输车辆驶入装载区时,控制可升降阻挡装置处于升起状态,以将挖掘机的铲斗的移动范围限制在运输车辆的有效装载区域内。这样通过确定运输车辆的车斗的区域位置信息,可以实现对运输车辆准确的装载作业,能够大大提高装载作业的效率。
- 还没有人留言评论。精彩留言会获得点赞!