一种自动上下料液袋灯检机的制作方法
本技术涉及液袋灯检,尤其是涉及一种自动上下料液袋灯检机。
背景技术:
1、在医药技术领域,越来越多的药厂使用液袋来代替玻璃药瓶,为了避免混有异物的液袋流入市场,在出厂前需要对液袋进行人工灯检,人工检测效率低,检准率也低,越来越难以适应大批量的药物生产。为此,有人开发出了可以自动上下料的液袋灯检机,比如公开号为cn113125451a、名称为“软袋智能灯检机”的中国发明专利申请,又比如公开号为cn113960059a、名称为“一种软袋灯检机”的中国发明专利申请,这些技术方案都能实现液袋的自动上下料以及自动灯检,但是在液袋的转移过程中对液袋的拾取和定位精度不够,主要原因是液袋为软袋,容易变形,导致袋头的位置容易产生较大的偏差,在与视觉检测装置对接过程容易出现问题,有必要进一步改进。
技术实现思路
1、为了解决现有技术中液袋在转移过程中拾取和定位精度不够的技术问题,本发明提供了一种自动上下料液袋灯检机。
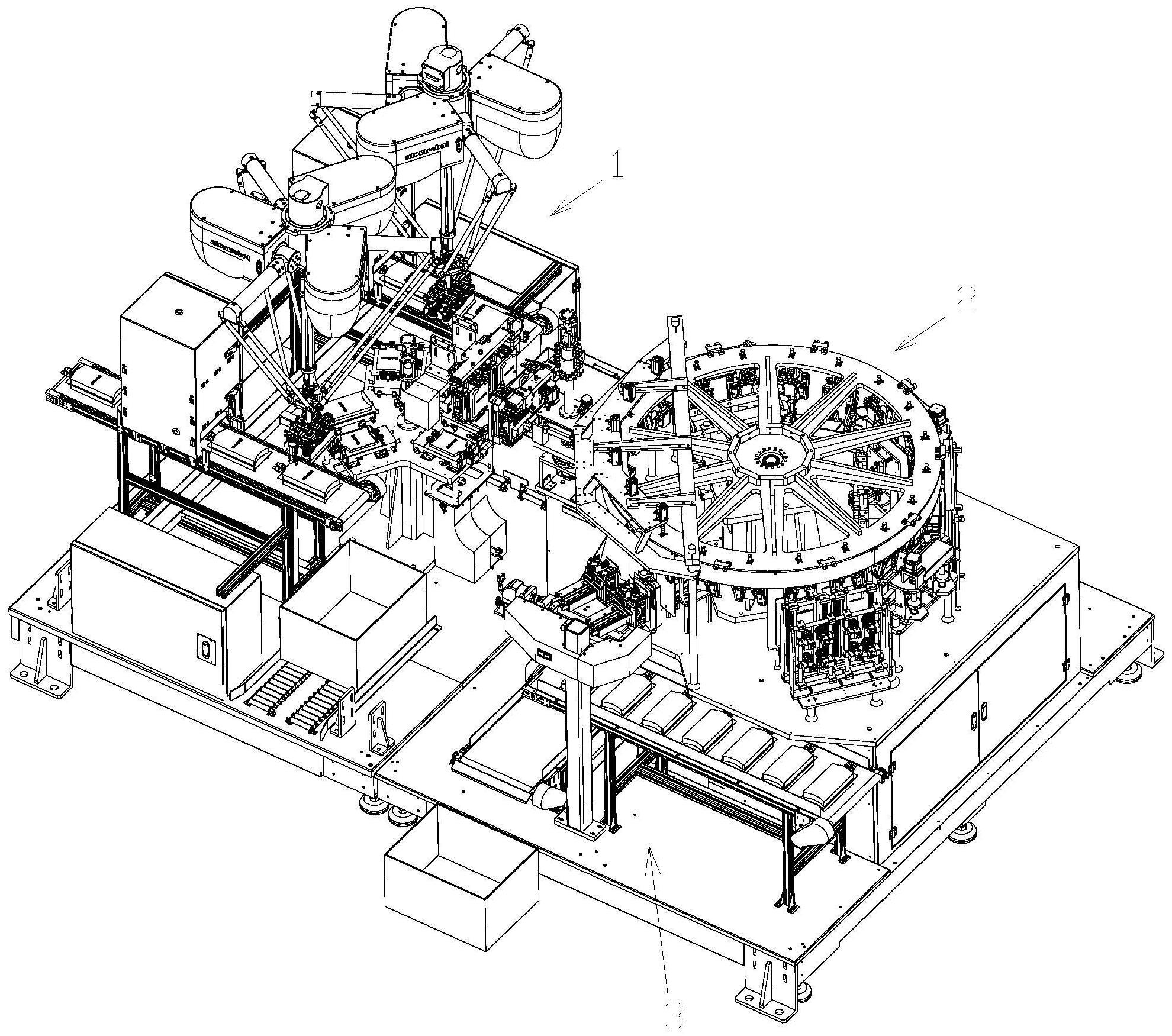
2、本技术提供的一种自动上下料液袋灯检机采用如下的技术方案:一种自动上下料液袋灯检机,包括自动上料装置、视觉检测装置和自动下料装置,所述自动上料装置包括上料皮带线、机器人蜘蛛手、第一吸盘机械手、多工位转盘、旋转上料机械手和移栽机构,所述第一吸盘机械手设置在机器人蜘蛛手上,包括多个第一真空吸盘和手指气缸,用于吸取上料皮带线上的液袋,第一真空吸盘用于吸附液袋的主体,手指气缸用于固定液袋的袋头,所述机器人蜘蛛手用于带动第一吸盘机械手运动,并将第一吸盘机械手吸取的液袋转运至多工位转盘,所述旋转上料机械手用于抓取多工位转盘上的液袋,并将水平的液袋旋转至竖直状态,所述移栽机构用于接住旋转上料机械手上的液袋,并传递给视觉检测装置,所述多工位转盘包括分度盘、载料升降平台和载料盘,所述载料升降平台分布在分度盘上,所述载料盘设置在载料升降平台上,所述分度盘用于带动载料升降平台旋转,所述载料升降平台用于带动载料盘升降,所述载料盘上设有第二真空吸盘和弹簧浮动夹块,所述第二真空吸盘用于吸附液袋的主体,所述弹簧浮动夹块用于固定液袋的袋头。
3、通过采用上述技术方案,本技术自动上料装置中的第一吸盘机械手包括第一真空吸盘和手指气缸,第一真空吸盘用于吸附液袋的主体,手指气缸用于固定液袋的袋头,多工位转盘上设有第二真空吸盘和弹簧浮动夹块,第二真空吸盘用于吸附液袋的主体,弹簧浮动夹块用于固定液袋的袋头,在液袋上料和转移部分或全部过程中,有相应的部件对袋头进行限位,从而较好地保证了袋头位置的确定性,在与视觉检测装置对接过程能顺利地进行,减少意外发生。
4、另外,自动上料装置中的上料皮带线可以与前端装液工序直接对接,实现生产和检测的全自动化,机器人蜘蛛手运动灵活,自由度多,第一真空吸盘和第二真空吸盘能够稳稳地吸附住液袋,在液袋高速运动中能防止甩飞,多工位转盘可以接收多个机器人蜘蛛手的上料,提高上料效率,旋转上料机械手能把水平状态的液袋转换成竖直状态,再通过移栽机构传递给视觉检测装置,液袋在视觉检测装置中始终处于竖直状态,方便拍照和检测操作。
5、优选地,所述旋转上料机械手包括第一回转机构和第二吸盘机械手,所述第二吸盘机械手设置在第一回转机构上,所述第二吸盘机械手用于吸取多工位转盘上的液袋,所述第一回转机构用于带动第二吸盘机械手旋转90度,使第二吸盘机械手吸取的液袋从水平状态转换为竖直状态。
6、优选地,所述移栽机构包括第二回转机构、水平直推机构和第三吸盘机械手,所述水平直推机构设置在第二回转机构上,所述第三吸盘机械手设置在水平直推机构上,所述第二回转机构用于带动水平直推机构做旋转运动,所述水平直推机构用于将第三吸盘机械手水平推出和收回。
7、优选地,所述上料皮带线上设有视觉轮廓检测机构和液袋翘头压平机构,所述液袋翘头压平机构包括透明升降压板,用于压平上料皮带线上的液袋,防止液袋的袋头翘头,所述视觉轮廓检测机构用于拍摄被压平的液袋,以获得液袋的准确轮廓。
8、优选地,所述视觉检测装置包括液袋转盘传送机构、液袋夹持机构、风刀组件、消泡组件、二组液袋拍打搅拌机构、第一面拍照机构和第二面拍照机构,所述液袋夹持机构设置在液袋转盘传送机构上,用于接收从移栽机构传送来的液袋,并在液袋转盘传送机构的带动下,将液袋依次传送至风刀组件处进行表面除杂物、消泡组件处进行消除气泡、第一组液袋拍打搅拌机构处进行拍打搅拌使杂质浮起、第一面拍照机构处对液袋进行拍照、第二组液袋拍打搅拌机构处再次进行拍打搅拌使杂质浮起、第二面拍照机构处对液袋的另一面进行拍照。
9、优选地,所述液袋夹持机构包括夹子本体、袋头夹爪和二个袋肩夹爪,所述夹子本体用于带动袋肩夹爪和袋头夹爪同步开合,所述袋头夹爪用于夹取液袋的袋头,二个袋肩夹爪分别用于夹取液袋的两肩。
10、优选地,所述液袋拍打搅拌机构包括前拍打组件和后搅拌背板组件,所述前拍打组件包括安装架、动力电机、旋转轴、多个曲柄滑块和多个弹性拍板,所述动力电机和旋转轴均设置在安装架上,多个曲柄滑块设置在旋转轴上,弹性拍板滑动设置在安装架上,所述动力电机用于驱动旋转轴旋转,旋转轴带动曲柄滑块旋转,曲柄滑块再带动弹性拍板做直线拍打动作;所述后搅拌背板组件包括浮动挡板和动力滑台气缸,所述动力滑台气缸用于带动浮动挡板前后移动,所述前拍打组件和后搅拌背板组件相向运动以实现对液袋的对拍打效果。
11、优选地,所述第一面拍照机构和第二面拍照机构均包括背景板、镜头组和镜头位置调节架,所述镜头组设置在镜头位置调节架上,所述背景板设置在镜头组的对侧。
12、优选地,所述第一面拍照机构和第二面拍照机构还包括对拍气缸和二个透明对拍夹板,所述透明对拍夹板设置在背景板和镜头组之间,所述对拍气缸用于带动二个透明对拍夹板开合,以夹紧固定液袋,防止在拍照时晃动。
13、优选地,所述自动下料装置包括良品旋转下料机、良品下料皮带线、不良品旋转下料机、不良品下料皮带线、推料气缸和推料板,所述推料板设置在推料气缸上,所述推料气缸用于带动推料板水平移动,以将液袋夹持机构上的液袋推向良品旋转下料机和不良品旋转下料机,所述良品旋转下料机用于从液袋夹持机构处吸取良品液袋,将良品液袋从竖直状态旋转至水平状态,并放置到良品下料皮带线上,所述不良品旋转下料机用于从液袋夹持机构处吸取不良品液袋,将不良品液袋从竖直状态旋转至水平状态,并放置到不良品下料皮带线上。
14、综上所述,本技术包括以下至少一种有益技术效果:
15、1.本技术自动上料装置中在液袋上料和转移过程中,有相应的部件对袋头进行限位,从而较好地保证了袋头位置的确定性,在与视觉检测装置对接过程能顺利地进行,减少意外发生;
16、2.自动上料装置中的上料皮带线可以与前端装液工序直接对接,实现生产和检测的全自动化,机器人蜘蛛手运动灵活,自由度多,第一真空吸盘和第二真空吸盘能够稳稳地吸附住液袋,在液袋高速运动中能防止甩飞,多工位转盘可以接收多个机器人蜘蛛手的上料,提高上料效率,旋转上料机械手能把水平状态的液袋转换成竖直状态,再通过移栽机构传递给视觉检测装置,液袋在视觉检测装置中始终处于竖直状态,方便拍照和检测操作;
17、3.本技术能够实现自动上下料,自动拍打搅拌、表面除杂质、消泡、拍照等工序在液袋转盘传送机构转动一周内完成,提高了大批量液袋检测的准确性,节省了人力,并提高了检测效率。
- 还没有人留言评论。精彩留言会获得点赞!