一种电缆抬升机器人及其使用方法与流程
本发明涉及电缆敷设,尤其涉及一种电缆抬升机器人及其使用方法。
背景技术:
1、近年来,随着城市建设步伐的加快,对城市美化和供电安全的要求日益提高。对于电力电缆,通常将其敷设在地下隧道内,这样既可以防止雷电、风雨等自然环境对电缆造成不利影响,还可以使电缆不占用地面空间,从而兼顾电缆供电可靠性以及市容美观。
2、隧道内施工环境复杂、空间狭小、转弯较多,难以控制安全和施工质量,使得人工敷设电缆的难度很大。为确保施工安全,保证电缆敷设质量并使电缆不受损伤,目前多采用电缆输送机和人工组合的敷设方法将电缆有序地敷设在隧道的支架上。然而,后续对隧道内支架上的电缆进行检修更换时,通常采用小型手动吊车提升电缆,其中吊架的进深和车辆的行驶仍需检修人员手动调节,导致工作效率较低。当电缆较沉时,考虑重心问题还需加长吊车支架,操作繁琐,极其影响检修工作效率。因此,有必要对提升电缆的装置或结构进行调整。
技术实现思路
1、本发明的目的在于提供一种电缆抬升机器人及其使用方法,可以电动调节起吊装置的高度和进深以及电动控制车体的行驶,同时在吊起待检修电缆时保证车体的稳定性。
2、为了达到上述目的,本发明通过以下技术方案实现:
3、一种电缆抬升机器人,包括:
4、车体;
5、控制装置,设置于所述车体上,用于获取移动指令和起吊指令;
6、动力装置,设置于所述车体上,与所述控制装置通信连接,用于根据所述移动指令产生驱动力和转向力,以使所述车体沿行驶面移动至电缆支架处;
7、起吊装置,其一端设置于所述车体上,其另一端设有吊具;且所述起吊装置与所述控制装置通信连接,用于根据所述起吊指令调整所述吊具的位置,以使所述吊具吊起所述电缆支架上的待检修电缆。
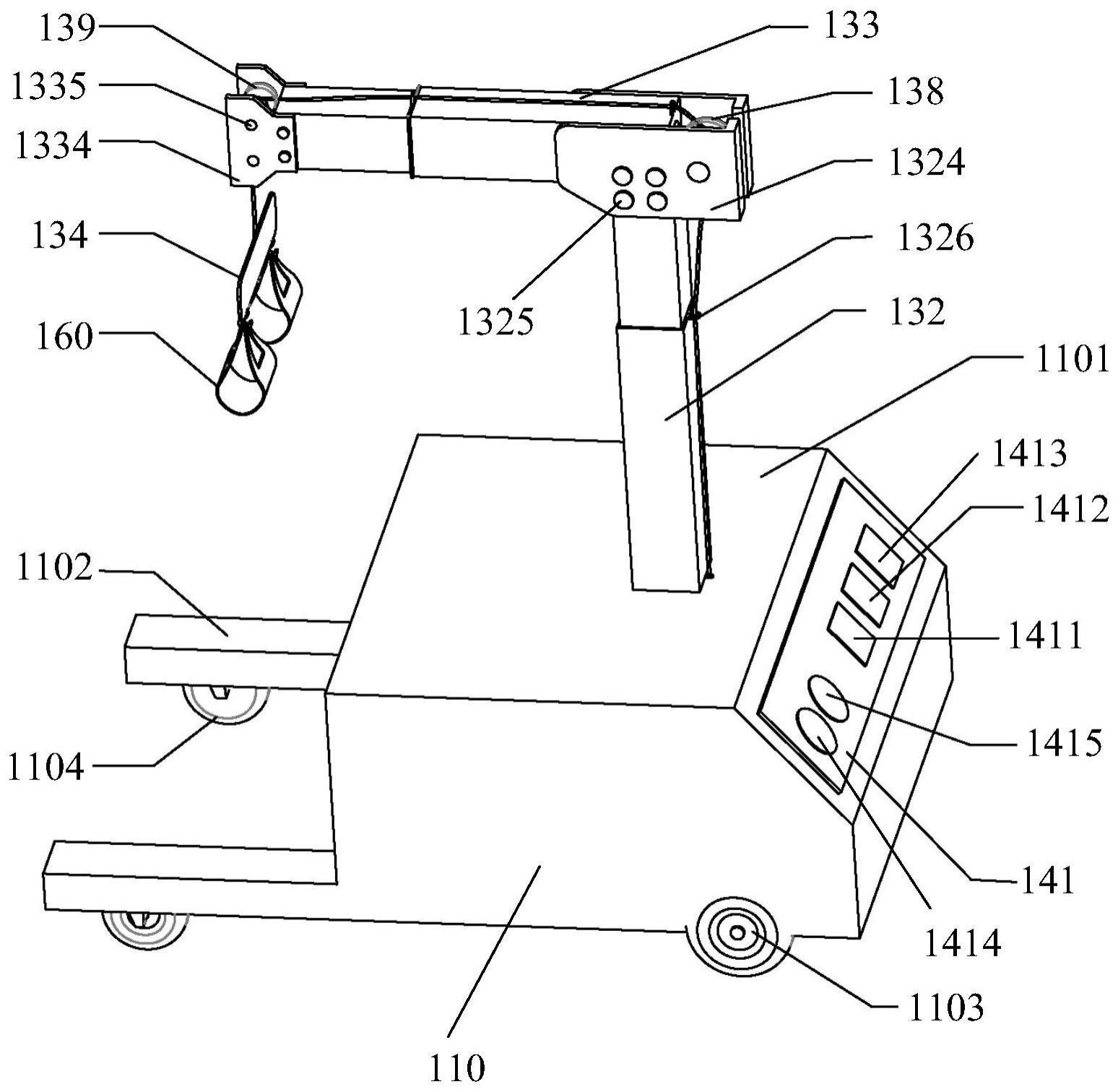
8、可选的,所述车体包括:
9、车身,用于承载所述动力装置、所述起吊装置和所述控制装置;
10、车架,与所述车身固定连接;且所述车架可伸入所述电缆支架与所述行驶面之间的间隙内;
11、两个主动车轮,间隔设置于所述车身远离所述车架(的一端,与所述动力装置连接,用于根据所述驱动力进行转动以及根据所述转向力进行转向;以及
12、被动车轮,设置于所述车架远离所述车身的一端;且所述主动车轮通过所述车身及所述车架带动所述被动车轮转动及转向,以使所述车体移动。
13、可选的,所述控制装置包括:
14、控制面板,设置于所述车身远离所述车架的一端,用于输入所述移动指令和所述起吊指令;
15、信号接收模块,与所述控制面板、所述动力装置和所述起吊装置通信连接,用于接收所述移动指令并转发至所述所述动力装置,以及用于接收所述起吊指令并转发至所述起吊装置。
16、可选的,所述动力装置包括:
17、驱动电机,与所述主动车轮固定连接,并与所述信号接收模块通信连接,用于根据所述移动指令向所述主动车轮提供所述驱动力;以及
18、转向机构,设置于所述车身上,与所述驱动电机固定连接,并与所述信号接收模块通信连接,用于根据所述移动指令向所述主动车轮提供所述转向力。
19、可选的,所述起吊装置包括:
20、液压泵,设置于所述车身上,与所述信号接收模块通信连接;
21、升降机构,其包括:第一油缸,设置于所述车身上,与所述液压泵连通;升降柱,设置于所述第一油缸内;
22、伸缩机构,其包括:第二油缸,设置于所述升降柱远离所述车身的一端,与所述液压泵连通;伸缩杆,其一端设置于所述第二油缸)内,其另一端与所述吊具连接;
23、所述液压泵根据所述起吊指令调整所述第一油缸和所述第二油缸的液压,以推动所述升降柱在竖直方向上往复移动以及推动所述伸缩杆在水平方向上往复移动,使得所述吊具与所述待检修电缆对齐并吊起所述待检修电缆。
24、可选的,所述起吊装置还包括:
25、绞盘,设置于所述车身上;
26、绳索,其一端缠绕于所述绞盘上,其另一端沿所述升降机构和所述伸缩机构延伸后与所述吊具连接;以及
27、绞盘电机,设置于所述车身上,与所述绞盘固定连接,并与所述信号接收模块通信连接;所述绞盘电机用于带动所述绞盘转动,以放长或收短所述绳索。
28、可选的,所述升降柱远离所述车身的一端和/或所述第二油缸靠近所述升降柱的一端设有第一定滑轮,且所述绳索穿过所述第一定滑轮与所述吊具连接。
29、可选的,所述伸缩杆远离所述升降柱的一端设有第二定滑轮;且所述绳索穿过所述第二定滑轮与所述吊具连接。
30、可选的,所述电缆抬升机器人,还包括:电源装置,设置于所述车身上,用于向所述动力装置、所述起吊装置和所述控制装置供电。
31、另一方面,本发明还提供一种如上述的电缆抬升机器人的使用方法,包括:
32、发送移动指令;
33、控制装置获取所述移动指令并转发至动力装置;
34、所述动力装置根据所述移动指令产生驱动力和转向力,以将车体移动至电缆支架处;
35、发送起吊指令;
36、所述控制装置获取所述起吊指令并转发至起吊装置;
37、所述起吊装置根据所述起吊指令调整吊具的位置,以使所述吊具吊起所述电缆支架上的待检修电缆。
38、本发明与现有技术相比至少具有以下优点之一:
39、本发明提供的一种电缆抬升机器人及其使用方法,控制装置可以获取移动指令和起吊指令,动力装置可以根据移动指令产生驱动力和转向力,以使车体沿行驶面移动至电缆支架处;起吊装置可以根据起吊指令调整吊具的位置,以使吊具吊起所述电缆支架上的待检修电缆。本发明可以电动调节起吊装置的高度和进深以及电动控制车体的行驶,同时在吊起待检修电缆时保证车体的稳定性。
40、本发明中车体在动力装置的作用下行驶至电缆支架处时,车架可以插入该电缆支架与其对应的行驶面之间的间隙内,从而使车架与电缆支架进行配合,防止吊起待检修电缆时车身倾倒,进而保持车体及所述电缆抬升机器人的重心稳定。此外,动力装置、起吊装置、控制装置和电源装置皆设置于车身上,可以增加车身的重量,进一步在吊起待检修电缆时增强车体及电缆抬升机器人的重心稳定性。
41、本发明中可以通过控制面板或遥控器操控到动力装置,从而控制车体及电缆抬升机器人的行驶与转向;主动车轮作为车体的后轮,同时作为转向驱动轮来调节机器人方向移动范围更小更简便,也符合隧道内空间狭小、转弯多的特点。
42、本发明中液压泵可以根据起吊指令调整第一油缸和第二油缸的液压,以推动升降柱在竖直方向上往复移动以及推动伸缩杆在水平方向上往复移动,从而电动调节起吊装置的高度和进深,使得吊具与待检修电缆对齐并吊起待检修电缆,实现电动智能化,提高工作效率。
43、本发明中通过第一定滑轮和第二定滑轮可以控制绳索垂直地上下运动,使得绳索不发生倾斜,从而保证吊具的稳定,同时还可以防止绳索出现摩擦损伤。此外,吊具上安装有吊装带,通过吊装带可以绑紧待检修电缆,从而控制待检修电缆不倾斜,进而防止待检修电缆损伤。
44、本发明中控制面板可以倾斜地设置于车体的后侧,以便于工作人员使用;同时控制面板上设有行程开关,以便于施工、检修、运维人员操作;控制面板上还设有压力表,以直观地显示油缸的液压。
- 还没有人留言评论。精彩留言会获得点赞!