基于相平面轨迹规划的变绳长集装箱起重机防摇控制方法
本发明涉及岸桥起重机的轨迹规划,涉及一种基于相平面轨迹规划的变绳长集装箱起重机防摇控制方法、设备及存储介质,特别涉及一种通过相平面法规划负载摆角,利用相平面轨迹进行线性逼近的方法处理变绳长问题,实现起重机防摇的方法、设备及存储介质。
背景技术:
1、集装箱起重机广泛应用于港口、物流公司等多种工作环境中。随着社会生活节凑的加快,物流时效的要求也不断提高,因此需要研究效率较高的起重机控制方案。为了确保快速并精确的将货物运送到目标位置,不仅要求提高运输效率和增强起重机系统的安全性,同时还要求工作过程中,负载摆动要尽可能小,需要满足工作环境的要求,实现精确定位。
2、绳长变化时,在不考虑大车运行的情况下,此系统就为一个多输入多输出的复杂控制系统。不仅要控制小车运行,还要控制负载的提升与下降,同时要求小车较快的达到目标位置,并且负载摆角输出较小。针对变绳长的情况,许多学者使用反馈控制进行防摇设计。比如,设计状态观测器消除负载摆动的方法、模糊逻辑或模糊估计反馈防摇控制策略、自适应控制以及滑模控制在防摇中的应用等。这些闭环控制防摇方法增加了系统的复杂性和投入成本。为了降低系统复杂度以及节约成本,同时保证起重机快速高效的完成运输工作,有许多学者投身研究变绳长下的开环控制防摇方法。比如,采用多次多项式或多次线性插值拟合负载轨迹的方法进行防摇控制,并没有取得很好的防摇效果,同时存在较大的残余误差。
3、因此,开发一种系统简单、成本低廉、防摇效果好且残余误差较小的变绳长集装箱起重机防摇控制方法极具现实意义。
技术实现思路
1、由于现有技术存在上述缺陷,本发明提供了一种系统简单、成本低廉、防摇效果好且残余误差较小的变绳长集装箱起重机防摇控制方法,具体地,使小车运动的同时负载具有提升和下降运动,通过线性逼近,规划负载摆角的相平面轨迹,有效抑制负载摆动,缓解系统残余振荡,提高起重机系统的工作效率,克服了现有变绳防摇控制方法无法兼顾低成本和良好防摇效果的缺陷。
2、为了实现上述目的,本发明提供以下技术方案:
3、基于相平面轨迹规划的变绳长集装箱起重机防摇控制方法,包括以下步骤:
4、(1)获取吊绳长度l、小车目标距离sx、小车最大速度vmax、最大摆角θmax、提升加速度avl及最大提升速度vlmax并确定控制方案类型,所述控制方案类型为提升-保持-下降或提升-保持;
5、(2)判断控制方案类型是否为提升-保持-下降,如是则进入步骤(3),反之则进入步骤(5);
6、(3)将步骤(1)获取的参数输入提升控制参数计算模型,提升控制参数计算模型输出加速度幅值a1和a2,切换时间ta1、tb、ta2和tc,提升控制参数计算模型涉及的计算公式如下:
7、sx=a1ta12+a2ta22+tc(a1ta1+a2ta2)+2a1ta1ta2+2a1ta1tb
8、vmax=a1ta1+a2ta2
9、θmax=r2
10、
11、
12、
13、
14、
15、
16、
17、
18、
19、
20、td=ta1+tb;
21、(4)根据步骤(3)所得的提升控制参数和控制方案类型确定控制方案,并根据控制方案对小车进行控制,所述控制方案中下降控制参数与提升控制参数匹配;
22、(5)将步骤(1)获取的参数输入提升控制参数计算模型,提升控制参数计算模型输出加速度幅值a1和a2,切换时间ta1、tb、ta2和tc,再将步骤(1)获取的参数输入保持控制参数计算模型,保持控制参数计算模型输出加速度幅值a12和a22,切换时间ta12、tb2和ta22,保持控制参数计算模型涉及的计算公式与提升控制参数计算模型基本相同,不同在于其还包括以下公式:
23、ω1=ω2=ω3=ωn;
24、(6)根据步骤(5)所得的提升控制参数、保持控制参数和控制方案类型确定控制方案,并根据控制方案对小车进行控制。
25、为了提高岸桥起重机的工作效率,通常考虑小车运动的同时伴有负载的提升与下降,因此提出一种变绳长集装箱起重机的防摇方案,由如图1根据动力学公式可知负载摆角具有如下关系式:
26、
27、其中,li=l-vlt
28、式中:t表示时间,变量(t)表示该变量关于时间的变量,表达摆角加速度,θ(t)表示摆角,ωn表示自然振荡频率,g表示重力加速度,l为绳的初始长度,vl为绳的提升速度,ac表示小车加速度。
29、分析系统的数学模型方程可知,在时变系统下,负载摆角的相平面轨迹表现出极限环行为。当提升速度vl<0时,根据式,在相平面上得到一族极限环,平衡解是一个不稳定的焦点,如图2所示。当提升速度vl>0时,根据式,在相平面内得到另一族极限环,平衡解是一个稳定的焦点,如图3所示。当起重机在运行过程中适当切换工况时,会有一族极限环组合,如图2中的实体轨迹oabco所示,让负载摆角及小车速度在适当的时间内归零。
30、研究发现使用双步加速时,大振荡发生的周期非常短,以至于线性和非线性频率近似之间的差异不会产生与所需系统动力学的显著偏差。从欠驱动起重机模型公式的双步加速相平面轨迹变化规律中可以找到形如oabco的轨迹轮廓,如图4所示。因此表明利用双步加速进行相平面轨迹规划时,将式线性逼近式是有效可行的。
31、
32、在小车加速阶段,主要分为三段进行逼近,在每一段逼近过程中,取切换时间的中点时刻的绳长计算自然振荡频率。小车减速阶段与加速阶段对称,这里不再赘述,相平面轨迹设计如图4所示。
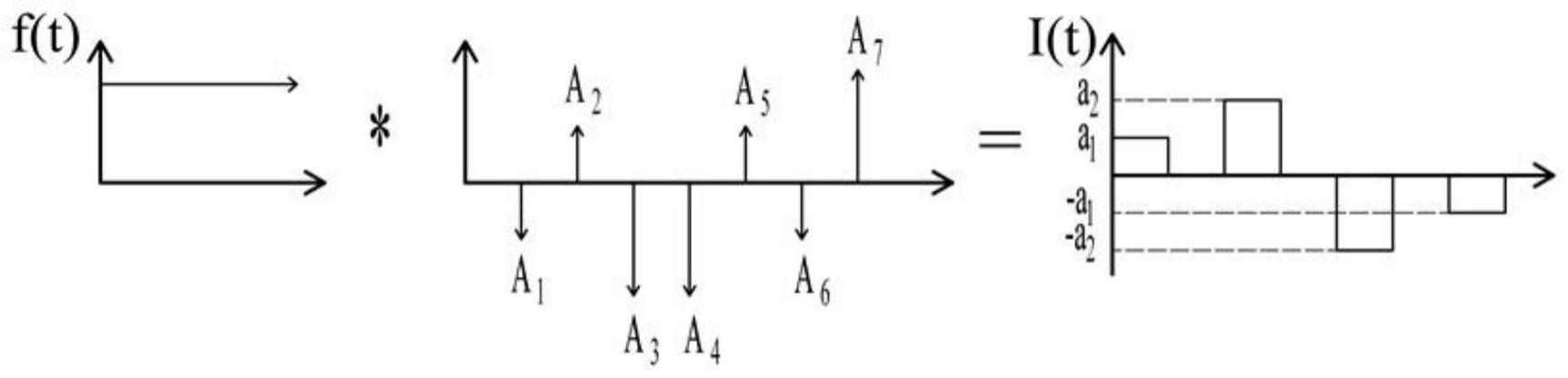
33、利用输入整形器得到按照设计的相平面轨迹运行的加速度信号如图5所示,这里考虑卷积后加速度a1>a2与a1<a2两种情形,其表达式如下:
34、
35、其中,td=ta1+tb,tg=tb+ta2,te=ta1+tb+ta2,tf=ta1+tb+ta2+tc。
36、当0≤t<ta1时,利用圆o1线性逼近第一段极限环轨迹,小车加速度为a1,提升速度为vl,自然振荡频率为ω1的运行过程。
37、
38、当加速度为a1时,基于式解微分方程得:
39、
40、将式对时间t求一阶导数得
41、
42、为了方便接下来的相平面轨迹分析,引入如下尺度化的角速度信号:
43、
44、基于式-得:
45、
46、可见当0≤t<ta1时,输入加速度为a1,相平面轨迹将沿着以为圆心,为半径的圆弧运动,符合规划的摆角相平面轨迹。
47、当ta1≤t<td时,利用圆o线性逼近第二段极限环轨迹(滑行段),小车加速度为0,提升速度为vl,自然振荡频率为ω2的运行过程。
48、
49、当加速度为0时,基于式解微分方程得:
50、θ2(t)=c4cos(ω2t)+c5sin(ω2t) (18)
51、将式对时间t求一阶导数得:
52、
53、其中,
54、
55、
56、同理引入:
57、
58、基于式-得:
59、
60、其中,
61、可见当ta1≤t<td时,输入加速度为0,相平面轨迹将沿着以原点为圆心,r2为半径的圆弧运动,符合规划的摆角相平面轨迹。
62、当td≤t<te时,利用圆o2线性逼近第三段极限环轨迹,小车加速度为a2,提升速度为vl,自然振荡频率为ω3的运行过程。
63、
64、当加速度为a2时,基于式解微分方程得:
65、
66、将式对时间t求一阶导数得:
67、
68、其中,
69、
70、
71、
72、同理引入:
73、
74、基于式-得:
75、
76、其中,r32=cb2+c72
77、可见当t1≤t<te时,输入加速度为a2,相平面轨迹将沿着以为圆心,r3为半径的圆弧运动,符合规划的摆角相平面轨迹。
78、这样便完成了负载摆角的相平面轨迹线性逼近的规划设计,接下来将进行加速度幅值及切换时间的求解。
79、基于式对时间t进行二次积分得小车的行驶距离sx:
80、sx=a1ta12+a2ta22+tc(a1ta1+a2ta2)+2a1ta1ta2+2a1ta1tb (27)
81、基于式可得小车的最大速度vmax为:
82、vmax=a1ta1+a2ta2 (28)
83、基于图6可知最大摆角θmax等于线段ob的幅值,即滑行段的摆角方程的圆半径,故:
84、θmax=r2 (29)
85、由第一段加速运行时的摆角轨迹方程,可以得到a点坐标:
86、
87、由a点坐标可得:
88、
89、由滑行段的摆角轨迹方程,可以得到c点坐标:
90、
91、由c点坐标可得:
92、
93、基于图6,弧所对应的加速时间ta1计算如下:
94、
95、基于图6,弧所对应的加速时间ta2计算如下:
96、
97、为了使第二段加速结束后摆角可以回到零,即第二段加速的负载摆角圆方程必须经过原点,有:
98、
99、基于约束条件:距离约束、速度约束、摆角约束、第一段加速时间约束、第二段加速时间约束和回零约束,可以求解出加速度幅值a1和a2,切换时间ta1,tb,ta2和tc。按照图5生成的小车加速度信号,给小车提供相应的加速度幅值及切换时间,即可完成小车的定位与防摇控制。
100、作为优选的技术方案:
101、如上所述的基于相平面轨迹规划的变绳长集装箱起重机防摇控制方法,所述提升控制参数包括加速度幅值a1和a2,切换时间ta1、tb、ta2和tc;
102、所述保持控制参数包括加速度幅值a12和a22,切换时间ta12、tb2和ta22。
103、如上所述的基于相平面轨迹规划的变绳长集装箱起重机防摇控制方法,步骤(4)中的控制方案具体为在0~ta1时使得小车加速度保持在a1;ta1~td时使得小车加速度为0;td~te时使得小车加速度为a2;te~tf时使得小车加速度为0;tf~tf+ta2时使得小车加速度为-a2;tf+ta2~tf+tg时使得小车加速度为0;tf+tg~tf+te时使得小车加速度保持在-a1,其中tg=tb+ta2,te=ta1+tb+ta2,tf=ta1+tb+ta2+tc。
104、如上所述的基于相平面轨迹规划的变绳长集装箱起重机防摇控制方法,步骤(6)中的控制方案具体为在0~ta1时使得小车加速度保持在a1;ta1~td时使得小车加速度为0;td~te时使得小车加速度为a2;te~tf时使得小车加速度为0;tf~tf+ta22时使得小车加速度为-a22;tf+ta22~tf+ta22+tb2时使得小车加速度为0;tf+ta22+tb2~tf+ta22+tb2+ta12时使得小车加速度保持在-a12,其中te=ta1+tb+ta2,tf=ta1+tb+ta2+tc。
105、本发明还提供了一种计算机设备,所述计算机设备包括:
106、至少一个处理器;以及,
107、与所述至少一个处理器通信连接的存储器;其中,
108、所述存储器存储有计算机可读指令,所述处理器执行所述计算机可读指令时实现如上所述的基于相平面轨迹规划的变绳长集装箱起重机防摇控制方法。
109、此外,本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储计算机可读指令,所述计算机可读指令被处理器执行时实现如上所述的基于相平面轨迹规划的变绳长集装箱起重机防摇控制方法。
110、以上技术方案仅为本发明的一种可行的技术方案而已,本发明的保护范围并不仅限于此,本领域技术人员可根据实际需求合理调整具体设计。
111、上述发明具有如下优点或者有益效果:
112、(1)本发明的基于相平面轨迹规划的变绳长集装箱起重机防摇控制方法,使用相平面轨迹规划与输入整形相结合的方法,结构简单,易于实现;
113、(2)本发明的基于相平面轨迹规划的变绳长集装箱起重机防摇控制方法,采用相平面法,可以在相平面中清楚地看到摆角大小的变化,再利用摆角相平面轨迹规划摆角的变化,可以有效控制摆角大小;
114、(3)本发明的基于相平面轨迹规划的变绳长集装箱起重机防摇控制方法,通过相平面法分析变绳长下负载摆角轨迹的变化,将时变系统线性化为时不变系统,在方便计算的条件下,实现有效防摇的效果;
115、(4)本发明的基于相平面轨迹规划的变绳长集装箱起重机防摇控制方法,适用于任何以阶跃加速度信号为输入,进行防摇控制或者缓解振荡最终实现零振荡的系统;
116、(5)本发明的基于相平面轨迹规划的变绳长集装箱起重机防摇控制方法,能够获取小残余振荡的控制方案,实现线性逼近,应用前景好。
- 还没有人留言评论。精彩留言会获得点赞!