基于立体仓库的取货方法和控制器与流程
本技术涉及堆叠式立体仓库出货领域,具体而言,涉及一种基于立体仓库的取货方法和控制器。
背景技术:
1、近年来,人力成本越来越高,这使得很多企业希望实现自动化管理以降低人力成本。而在制造业中,仓储物流成本一直占很大的比例,据统计,仓储物流费用占制造业总成本的50%左右,因此企业想要降本增效,必须想办法减少物流费仓储费用。在这样的背景之下,企业对自动化仓储的需求日益加大,自动化立体仓库的使用可以大幅减少人力,节约人力成本,同时自动化技术的运用还让仓储物流效率大幅提升。近年来,越来越多的企业在规划仓储物流时优先考虑自动化立体仓库。但是现有的基于立体仓库的取货方法效率不高,且占用空间大、空间利用率低。
技术实现思路
1、本技术的主要目的在于提供一种基于立体仓库的取货方法和控制器,以至少解决现有技术中基于立体仓库的取货方法效率低的问题。
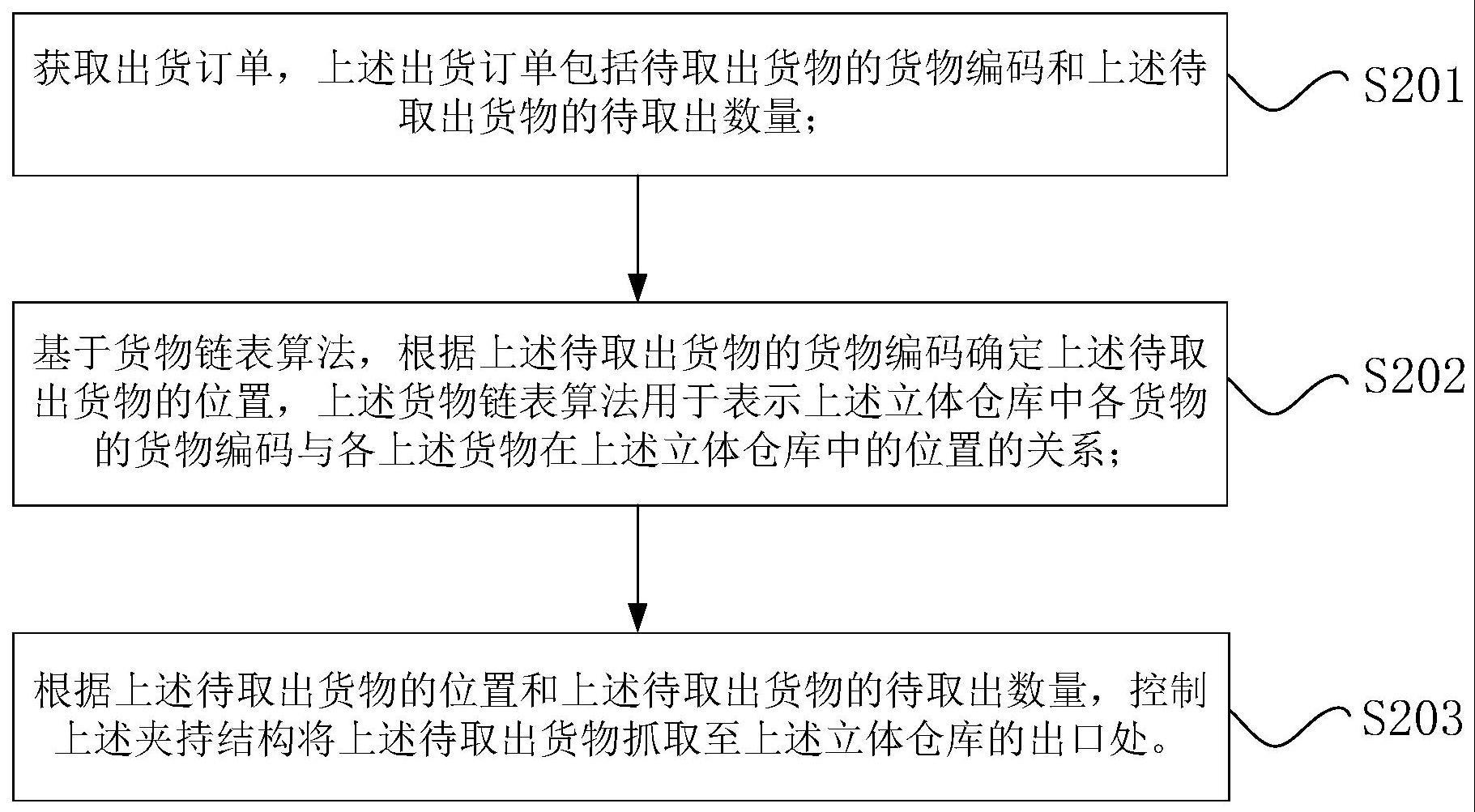
2、为了实现上述目的,根据本技术的一个方面,提供了一种基于立体仓库的取货方法,应用于仓库取货系统中的控制器,所述仓库取货系统还包括至少一个夹持结构和立体仓库,所述立体仓库中包括多个货物,所述夹持结构和所述控制器通信连接,所述方法还包括:获取出货订单,所述出货订单包括待取出货物的货物编码和所述待取出货物的待取出数量;基于货物链表算法,根据所述待取出货物的货物编码确定所述待取出货物的位置,所述货物链表算法用于表示所述立体仓库中各货物的货物编码与各所述货物在所述立体仓库中的位置的关系;根据所述待取出货物的位置和所述待取出货物的待取出数量,控制所述夹持结构将所述待取出货物抓取至所述立体仓库的出口处。
3、可选地,所述立体仓库包括调度区,所述调度区为暂时存放所述货物的区域,根据所述待取出货物的位置和所述待取出货物的待取出数量,控制所述夹持结构将所述待取出货物抓取至所述立体仓库的出口处,包括:在所述待取出货物的待抓取一侧的表面上放置有非待取出货物的情况下,控制所述夹持结构先抓取所述非待取出货物并将所述非待取出货物暂存至所述调度区;在将所述非待取出货物暂存至所述调度区之后,根据所述待取出货物的位置和所述待取出货物的待取出数量,控制所述夹持结构将所述待取出货物抓取至所述立体仓库的出口处。
4、可选地,所述夹持结构每次可抓取的所述货物的数量为目标数量,所述待取出货物的数量为至少一个,所述非待取出货物的数量为至少一个,各所述非待取出货物均位于所有的所述待取出货物的待抓取一侧,并且所有的所述待取出货物与所有的所述非待取出货物依次堆叠成目标列,在所述待取出货物的待抓取一侧的表面上放置有非待取出货物的情况下,控制所述夹持结构先抓取所述非待取出货物并将所述非待取出货物暂存至所述调度区,包括:在所述目标列中的所述非待取出货物的数量小于或者等于所述目标数量的情况下,获取所述目标列中距离所述待取出货物的待抓取一侧的表面最近的所述非待取出货物的位置,并根据距离所述待取出货物的待抓取一侧的表面最近的所述非待取出货物的位置,控制所述夹持结构单次将所述目标列中所有的所述非待取出货物抓取并暂存至所述调度区;在所述目标列中的所述非待取出货物的数量大于所述目标数量,并且所述非待取出货物的数量为所述目标数量的整数倍的情况下,根据第一目标位置分n次将所述非待取出货物抓取至所述调度区,n等于整数倍中的最大值,并且每一次抓取的数量是所述目标数量,其中,所述第一目标位置处的非待取出货物与最远位置处的非待取出货物之间的非待取出货物数量为所述目标数量的整数倍减一,所述最远位置为距离所述待取出货物的待抓取一侧的表面最远的所述非待取出货物的位置,所述n≥2;在堆叠在所述目标列上的所述非待取出货物的数量大于所述目标数量,并且所述非待取出货物的数量不为所述目标数量的整数倍的情况下,根据第二目标位置分m次将所述非待取出货物抓取至所述调度区,并且第m次抓取所述非待取出货物数量小于所述目标数量,前m-1次抓取所述非待取出货物数量等于所述目标数量,所述第二目标位置包括所述第一目标位置和所述目标列中的距离所述待取出货物的待抓取一侧的表面最近的所述非待取出货物的位置,m≥2。
5、可选地,所述立体仓库还包括多个货物分区,各所述货物分区中存放有对应货物编码的货物,所述方法还包括:在所述待取出货物的待抓取一侧的表面上未放置非待取出货物且目标分区和非目标分区均放置有所述待取出货物的情况下,控制所述夹持结构先从所述非目标分区中将所述待取出货物抓取至所述立体仓库的出口处,若所述非目标分区中的所述待取出货物的数量小于所述待取出货物的待取出数量,再从所述目标分区中将所述待取出货物抓取至所述立体仓库的出口处。
6、可选地,所述立体仓库还包括多个货物分区,各所述货物分区中存放有对应货物编码的货物,根据所述待取出货物的位置和所述待取出货物的待取出数量,控制所述夹持结构将所述待取出货物抓取至所述立体仓库的出口处,包括:在所述待取出货物的待抓取一侧的表面上未放置非待取出货物且各所述待取出货物全部放置在目标分区的情况下,控制所述夹持结构将待取出数量个所述待取出货物抓取至所述立体仓库的出口处;在所述待取出货物的待抓取一侧的表面上未放置所述非待取出货物且所述目标分区和非目标分区均放置有所述待取出货物的情况下,至少根据所述待取出货物的待取出数量、所述目标分区中放置的所述待取出货物的数量和所述非目标分区中放置的所述待取出货物的数量,控制所述夹持结构将待取出数量个所述待取出货物抓取至所述立体仓库的出口处。
7、可选地,所述夹持结构有多个,在所述待取出货物的待抓取一侧的表面上未放置所述非待取出货物且所述目标分区和非目标分区均放置有所述待取出货物的情况下,至少根据所述待取出货物的待取出数量、所述目标分区中放置的所述待取出货物的数量和所述非目标分区中放置的所述待取出货物的数量,控制所述夹持结构将待取出数量个所述待取出货物抓取至所述立体仓库的出口处,包括:获取所述目标分区的位置和所述非目标分区的位置;根据所述目标分区的位置和所述非目标分区的位置,确定第一距离和第二距离,所述第一距离为所述目标分区与所述立体仓库的出口处的距离,所述第二距离为所述非目标分区与所述立体仓库的出口处的距离;根据所述第一距离、所述第二距离、所述待取出货物的待取出数量、所述目标分区中堆叠的所述待取出货物的数量和所述非目标分区中堆叠的所述待取出货物的数量,控制所述夹持结构将待取出数量个所述待取出货物抓取至所述立体仓库的出口处。
8、可选地,所述夹持结构有多个,根据所述第一距离、所述第二距离、所述待取出货物的待取出数量、所述目标分区中堆叠的所述待取出货物的数量和所述非目标分区中堆叠的所述待取出货物的数量,控制所述夹持结构将待取出数量个所述待取出货物抓取至所述立体仓库的出口处,包括:获取各所述夹持结构的位置;根据所述第一距离和各所述夹持结构的位置,计算第一时间,所述第一时间为控制一个或者多个所述夹持结构平均将一个所述待取出货物从所述目标分区中抓取至所述立体仓库的出口处的时间;根据所述第二距离和各所述夹持结构的位置,计算第二时间,所述第二时间为控制一个或者多个所述夹持结构平均将一个所述待取出货物从所述非目标分区中抓取至所述立体仓库的出口处的时间;根据所述第一时间、所述第二时间、所述待取出货物的待取出数量、所述目标分区中堆叠的所述待取出货物的数量和所述非目标分区中堆叠的所述待取出货物的数量,控制所述夹持结构将待取出数量个所述待取出货物抓取至所述立体仓库的出口处。
9、可选地,根据所述第一时间、所述第二时间、所述待取出货物的待取出数量、所述目标分区中堆叠的所述待取出货物的数量和所述非目标分区中堆叠的所述待取出货物的数量,控制所述夹持结构将待取出数量个所述待取出货物抓取至所述立体仓库的出口处,包括以下至少之一:在所述目标分区中堆叠的所述待取出货物的数量大于或者等于所述待取出货物的待取出数量且所述第一时间小于所述第二时间的情况下,控制所述夹持结构从所述目标分区中将待取出数量个所述待取出货物抓取至所述立体仓库的出口处;在所述非目标分区中堆叠的所述待取出货物的数量大于或者等于所述待取出货物的待取出数量且所述第二时间小于所述第一时间的情况下,控制所述夹持结构从所述非目标分区中将待取出数量个所述待取出货物抓取至所述立体仓库的出口处。
10、可选地,所述立体仓库包括调度区,所述调度区为暂时存放所述货物的区域,所述方法还包括:根据第一类指针变量确定所述待取出货物的待抓取一侧的表面上没有放置非待取出货物,所述第一类指针变量表示所述待取出货物的待抓取一侧的表面上没有放置所述非待取出货物;根据第二类指针变量确定所述待取出货物的待抓取一侧的表面上放置了所述非待取出货物,所述第二类指针变量表示所述待取出货物的待抓取一侧的表面上放置了所述非待取出货物。
11、根据本技术的另一方面,提供了一种控制器,所述控制器还包括:获取单元,用于获取出货订单,所述出货订单包括待取出货物的货物编码和所述待取出货物的待取出数量;确定单元,用于基于货物链表算法,根据所述待取出货物的货物编码确定所述待取出货物的位置,所述货物链表算法用于表示立体仓库中各货物的货物编码与各所述货物在所述立体仓库中的位置的关系;抓取单元,用于根据所述待取出货物的位置和所述待取出货物的待取出数量,控制夹持结构将所述待取出货物抓取至所述立体仓库的出口处。
12、根据本技术的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行任意一种所述的基于立体仓库的取货方法。
13、根据本技术的另一方面,提供了一种电子设备,包括:一个或多个处理器,存储器,以及一个或多个程序,其中,所述一个或多个程序被存储在所述存储器中,并且被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行任意一种所述的基于立体仓库的取货方法。
14、应用本技术的技术方案,该方法应用于仓库取货系统中的控制器,仓库取货系统还包括至少一个夹持结构和立体仓库,立体仓库中包括多个货物,夹持结构和控制器通信连接,该方法包括:获取出货订单,出货订单包括待取出货物的货物编码和待取出货物的待取出数量;基于货物链表算法,根据待取出货物的货物编码确定待取出货物的位置,货物链表算法用于表示立体仓库中各货物的货物编码与各货物在立体仓库中的位置的关系;根据待取出货物的位置和待取出货物的待取出数量,控制夹持结构将待取出货物抓取至立体仓库的出口处。该方法利用算法在最短的时间将混合堆叠的货物取到出口,采用夹持结构代替小车可以省去地面上小车运行的空间,解决了现有技术中基于立体仓库的取货方法效率低的问题。
- 还没有人留言评论。精彩留言会获得点赞!