一种建筑机器人自动砖块卷送装置
本发明涉及建筑机器人,尤其涉及一种建筑机器人自动砖块卷送装置。
背景技术:
1、近年来,在城镇化进程加速前进的背景下,我国建筑行业市场规模不断扩大。但传统建筑业因劳动强度大、工作环境差、安全风险高等特点对年轻人吸引力持续下降,建筑行业招工难、用工荒的现象不断加剧。而处在数字化变革的新时代,作为国民经济重要产业之一的建筑业向着智能化、信息化、数字化转型升级已迫在眉睫。
2、如今,以机器人技术为代表的人工智能产业蓬勃兴起,通过充分利用智能等相关技术,研发应用智能化机械设备,可以有效提高建造过程的智能化水平,减少对人工技术的依赖,建筑机器人由此而生。在危险环境、不确定性环境及高重复性劳动作业等场景下,建筑机器人能够代替工人作业,将人从繁重、艰苦、不安全的劳动中解脱出来,有效提高施工效率和品质。在建筑施工时,砖块作为最常见的基础建筑材料需要搬运至砌砖作业处,传统的机械夹手进行夹取搬运时,由于夹手与砖块之间为刚性接触容易致使砖块破损,而柔性夹爪又无法突破大重量夹取的限制。此外,在搬运过程中,砖块在地面上的放置角度千差万别,如何针对任意角度放置的砖块进行柔性夹取搬运,对于降低砖块破损率、提高建筑效率有效非常重要的意义。
技术实现思路
1、本发明的目的在于提供一种建筑机器人自动砖块卷送装置,实现对大重量、不规则形状以及任意角度放置的砖块的柔性搬运工作,进而提高搬运效率和稳定性。
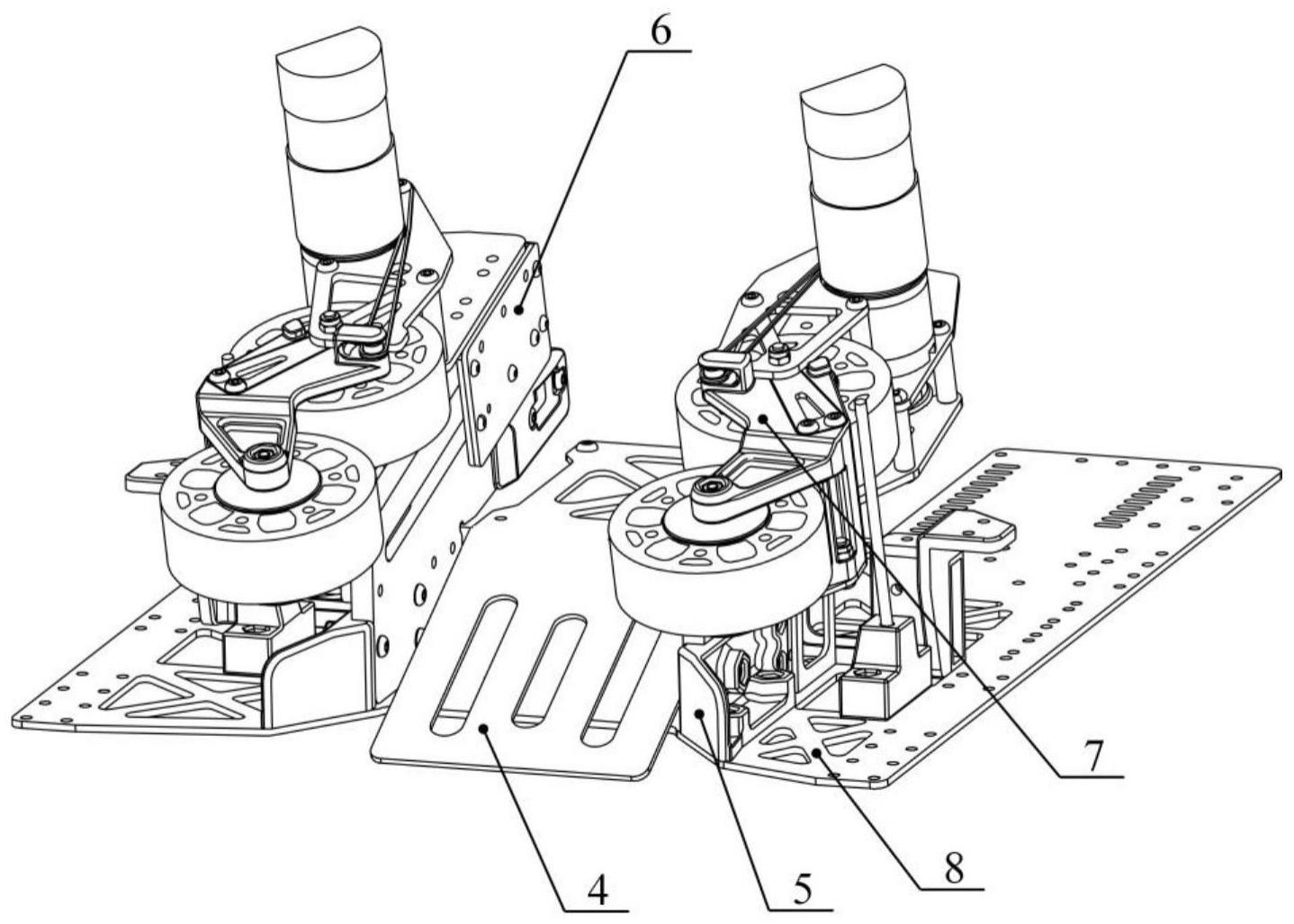
2、为了达到上述目的,本发明提供了一种建筑机器人自动砖块卷送装置,包括导向平台和位于所述导向平台两侧相对设置的砖块卷送机构;
3、所述导向平台包括水平段和弯折段,所述弯折段斜向下弯折设置;
4、所述砖块卷送机构包括侧面支撑组件、滑动调节组件和砖块卷送组件,所述滑动调节组件可调节地安装在所述侧面支撑组件上,所述砖块卷送组件固定安装在所述滑动调节组件上;
5、所述滑动调节组件能够沿着所述侧面支撑组件活动,以使所述砖块卷送组件的前端具有伸出所述侧面支撑组件外和缩回所述侧面支撑组件内两种状态。
6、进一步,所述侧面支撑组件包括张角连接块和侧板,所述张角连接块与所述侧板的一端固定连接,所述侧板中部具有滑孔,所述滑孔靠近所述张角连接块的一端低于远离所述张角连接块的一端倾斜设置,所述滑动调节组件滑动安装在所述滑孔内。
7、进一步,所述侧板远离所述张角连接块的一端设置有距离传感器。
8、进一步,所述滑动调节组件包括分别位于所述侧板两侧相对设置的滚轮框架板和框架盖板,所述滚轮框架板和框架盖板之间通过四根第一螺栓柱连接;
9、所述滚轮框架板位于所述侧板的外侧设置,所述滚轮框架板的内侧面上开有左右对称的四个十字形方槽,每个所述方槽内通过滚轮柱转动连接着第一滚轮,所述滚轮柱纵向设置,所述第一滚轮沿所述侧板板面滚动;
10、所述滚轮框架板的内侧面具有向外凸出的凸块,所述凸块滑动安装在所述滑孔内部;
11、四根所述第一螺栓柱上均转动安装有第二滚轮,其中两个所述第二滚轮沿所述侧板上端表面滑动;剩下两个所述第二滚轮沿所述滑孔下表面滑动,剩下两个所述第二滚轮分别位于所述凸块两端设置;
12、所述滚轮框架板的外侧面上固定安装有角形支架,所述砖块卷送组件安装在所述角形支架上。
13、进一步,所述滑孔前端固定安装有限位块。
14、进一步,所述砖块卷送组件包括驱动电机、电机板、方管状的连接件、上夹板、下支板、前支板、支板骨架、第一柔性轮和第二柔性轮,所述驱动电机固定安装在所述电机板上,所述驱动电机竖直设置,所述驱动电机的转轴向下穿出所述电机板设置;所述电机板固定安装在所述角形支架顶面上;
15、所述连接件顶部固定安装在所述电机板的底部,所述连接件位于所述滚轮框架板和框架盖板之间顶部设置,且所述连接件两侧分别与所述滚轮框架板和框架盖板固定连接;
16、所述上夹板通过三个环绕于驱动电机设置的上立柱固定连接在电机板上方,所述下支板通过三个下立柱固定连接在电机板下方,所述上夹板的前端和下支板的前端均伸出所述电机板设置;
17、所述下支板前端上装有第一长螺栓,所述第一长螺栓自下而上依次转动连接着下支板前端、前支板末端、第一柔性轮、支板骨架末端、上夹板前端和所述前支板前端;
18、所述第一柔性轮转动安装在所述第一长螺栓上,所述第一柔性轮位于所述支板骨架末端和前支板末端之间设置;所述第二柔性轮通过第二长螺栓转动安装在所述前支板前端与支板骨架前端之间;所述第一柔性轮轴向和第二柔性轮轴向平行设置;
19、所述支板骨架末端顶部通过弹性皮条与上夹板的末端弹性连接,所述弹性皮条与所述支板骨架末端顶部的连接处与所述第一长螺栓偏心设置,所述弹性皮条向内侧拉动所述支板骨架;
20、所述驱动电机的转轴驱动所述第一柔性轮和第二柔性轮同步转动。
21、进一步,所述驱动电机的转轴上固定安装有同步轮,所述同步轮通过第一同步带与所述第一柔性轮传动连接,所述第一柔性轮通过第二同步带与所述第二柔性轮传动连接。
22、进一步,所述支板骨架的末端上表面具有两个与所述上夹板前端侧立面配合以限制所述支板骨架转动范围的限位凸起,所述弹性皮条的一端与靠内侧设置的限位凸起连接。
23、进一步,所述第一柔性轮和第二柔性轮结构相同,均包括轮毂、弹性轮圈和轮盖,所述轮毂、弹性轮圈和轮盖为同轴固定连接;
24、所述轮毂下端为带轮,上端带有卡盘;
25、所述弹性轮圈的内部开有槽孔,并通过槽孔安装在轮毂的卡盘上;
26、所述弹性轮圈的上方固定安装着轮盖,所述弹性轮圈采用柔性材料制作。
27、进一步,所述砖块卷送机构还包括与所述砖块卷送组件相对设置的限制组件,所述限制组件位于所述砖块卷送组件外侧设置以限制所述砖块卷送组件自由伸出所述侧面支撑组件外;
28、所述限制组件包括限位杆底座和固定安装在所述限位杆底座上的限位杆,所述限位杆与所述第一柔性轮轴向平行设置,所述限位杆外壁紧贴并抵压在所述第一柔性轮的斜前方。
29、本发明的有益效果体现在:
30、(1)本发明中的砖块卷送组件使用柔性轮代替传统的机械夹爪,通过两组四个斜置交错布置的柔性轮,依靠弹性轮圈旋转产生的摩擦力以及弹性皮条提供的夹持力实现对砖块的柔性搬运,同时柔性轮采用斜放置的方式,使得在搬运过程中将砖块产生的重力分解,并将大部分的力分解到导向平台的斜面上,以实现对较大重量的砖块轻松搬运;
31、(2)本发明中的砖块卷送组件,第二柔性轮以第一柔性轮的旋转轴为转动中心,通过弹性皮条实现砖块卷送组件张合角度的自动调节,搬运砖块时两侧受压张开,并基于差速原理调节挤压力偏大侧柔性轮的转速,能够实现对任意角度放置的砖块进行吸纳搬运;
32、(3)本发明中的滑动调节组件,通过限位杆的限位作用,可将砖块卷送组件收纳进装置内部,大大减少建筑机器人非工作时间的占用空间,以便于机器人的转向移动,同时侧面支撑机构上加入了距离传感器,能有效判别导向平台上是否载运砖块,以便于建筑机器人的后续搬运工作,有利于实现建筑机器人的全自动化控制。
- 还没有人留言评论。精彩留言会获得点赞!