一种大型水电站厂房桥机小车行走自动定位方法及系统与流程
本发明涉及计算机平台负载平衡,具体为一种大型水电站厂房桥机小车行走自动定位方法。
背景技术:
1、在工业现场,桥式起重机被广泛的用于水电厂厂房机组检修等过程的生产作业当中,然而在起重机的运输过程中,由于小车的加减速和负载的提升动作以及摩擦引起的扰动等会引起负载的来回摆动,这不但增加了事故发生的可能性,而且严重影响了生产作业效率的提高。针对桥式起重机性能的提升,主要可以从两个方面进行研究:小车的定位和负载的防摆控制。采取的控制方式主要分为开环控制和闭环控制。
2、开环控制以输入整形和轨迹规划最具代表性。该类方法利用桥运动与负载摆动之间的耦合关系,将台车的加速度作为输入信号,来规划桥机的运动轨迹,在无外界干扰的情况下,具有良好的控制效果;无需借助大量传感器,设计简单,使用方便,被广泛应用在工程中。然而,该类方法的控制精度依赖于负载的自然振荡频率,即吊绳长度,且运动轨迹被事先规划,无法应对外界随机干扰,鲁棒性较差。
3、闭环控制则利用实时信号反馈,提高了系统的鲁棒性。其控制方式包括:最优控制、自适应控制、输出反馈控制、基于切换的控制策略、跟踪控制、基于能量的控制策略等。其中,基于能量的控制策略可通过构造系统能量函数来设计控制器,避免直接分析系统复杂的运动状态,且具有良好的控制性能和明确的物理意义,被广泛的应用于桥式起重机的定位防摆控制。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述存在的问题,提出了本发明。
3、因此,本发明解决的技术问题是:现有的起重机的运输过程中,加减速和负载的提升动作以及摩擦引起的扰动等会引起负载的来回摆动,这不但增加了事故发生的可能性,而且严重影响了生产作业效率的提高,开环控制控制精度依赖于负载的自然振荡频率,且运动轨迹被事先规划,无法应对外界随机干扰,鲁棒性较差。
4、为解决上述技术问题,本发明提供如下技术方案:一种大型水电站厂房桥机小车行走自动定位方法,包括:
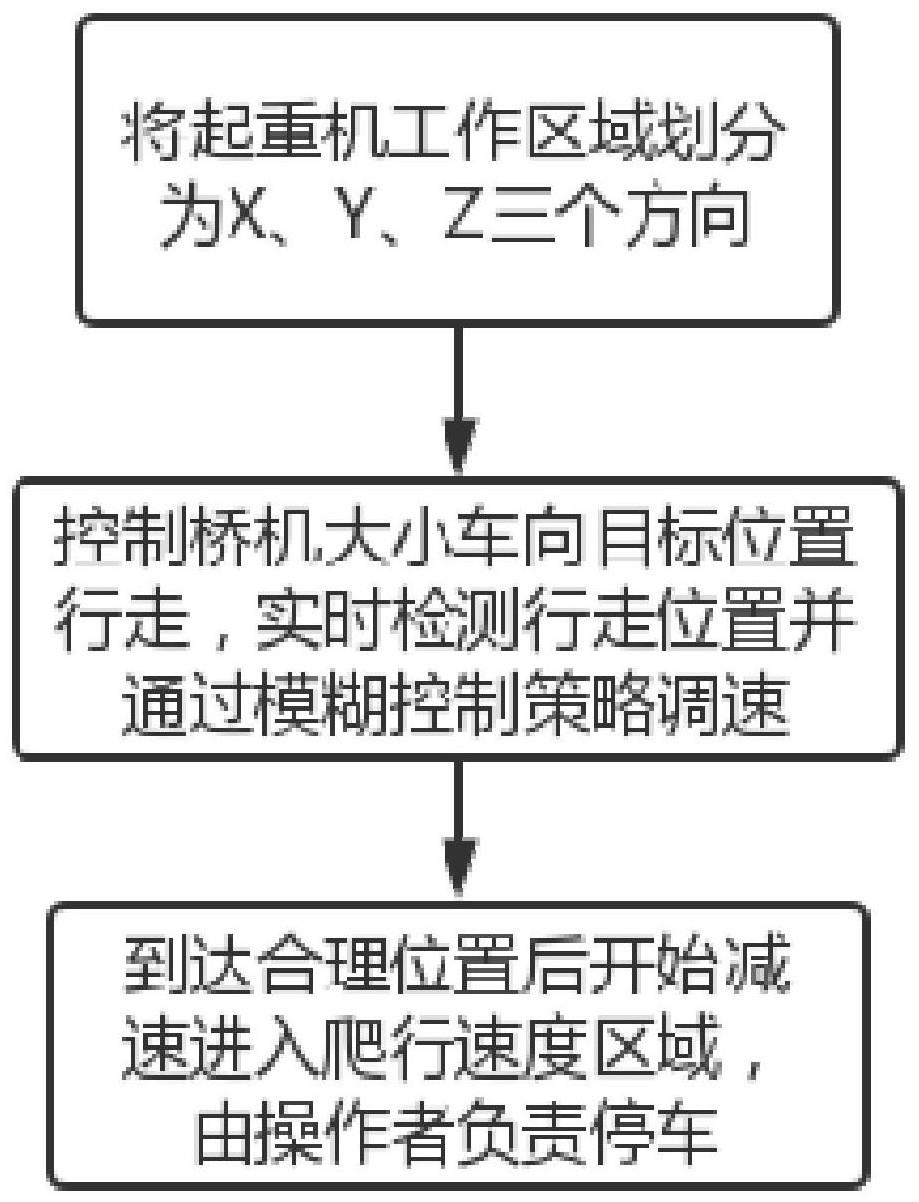
5、把起重机工作区域划分为x、y、z三个方向;
6、输入操作指令使桥机大小车向目标位置行走,行走过程的加速与减速均通过模糊控制策略实现调速控制,行走过程中实时检测行走位置并反馈至位置控制系统;
7、行走机构到达合理位置后开始减速进入爬行速度区域,此时由操作者负责停车,最终完成行走机构的准确定位。
8、作为本发明所述的大型水电站厂房桥机小车行走自动定位方法的一种优选方案,其中:所述三个方向的划分包括,
9、起重机的大车行走机构沿车间两侧上方墙壁铺设的钢轨做横向运行,所述横向运行方向为x,小车行走机构在所述大车行走机构上运行,相对大车行走机构做纵向运动,所述纵向运行方向为y,吊钩在垂直方向运动,所述垂直运行方向为z。
10、作为本发明所述的大型水电站厂房桥机小车行走自动定位方法的一种优选方案,其中:所述模糊控制策略包括位移模糊控制和防摆模糊控制,
11、所述位移模糊控制输入为小车的速度与速度参考曲线之差,输出为控制作用u1,输入、输出的模糊分割数都为9,即nl负很大、nb负大、nm负中、ns负小、ze零、ps正小、pm正中、pb正大、pl正很大;
12、所述防摆模糊控制输入为摆角和摆角速度,输出为控制作用,输入和输出变量的模糊分割数都取5,即nb负大、ns负小、ze零、ps正小、pb正大。
13、作为本发明所述的大型水电站厂房桥机小车行走自动定位方法的一种优选方案,其中:所述定位包括,
14、在定位控制系统监控界面中,操作者通过选择目标位置,显示出行走机构当前位置距目标位置的横向x和纵向y的距离,即起重机的本次作业行程,从而获得起重机本次行程最大速度,并将行程最大速度传给plc作为给定速度,此时行走机构开始向目标位置运动,运动过程的加速与减速都是通过模糊控制策略实现调速控制;
15、测距传感器在行走机构达到最大速度后将测量的加速距离传送给上位机,上位机经与全程距离计算可以得出减速距离,即减速的起始位置,并给下位控制器减速信号,使行走机构在合理的位置开始减速,在这过程中再次由模糊控制策略完成减速控制,最后以非常慢的速度接近目标进入爬行速度区域,由操作者负责停车,完成行走机构的准确定位。
16、作为本发明所述的大型水电站厂房桥机小车行走自动定位方法的一种优选方案,其中:所述位移模糊控制输入变量小车位移误差和速度误差,公式分别表示为:
17、
18、
19、其中x和xd为任意给定时刻的小车实际位移及其期望值,和为任意给定时刻的小车实际速度及其期望的最终速度,在经过模糊控制器的控制后理想的小车实际位移:xd=目标距离;
20、所述防摆模糊控制的模糊输入变量是吊具摆角误差ew与角速度误差其中吊具摆角定义为吊具与竖直方向夹角,公式分别表示为:
21、
22、其中,w为初始摆角,wd为模糊控制器输出后的消摆角度,为积分后的速度,为不可预测的速度。
23、作为本发明所述的大型水电站厂房桥机小车行走自动定位方法的一种优选方案,其中:所述模糊控制策略还包括卷扬模糊控制,
24、输入变量为吊物当前位置与预期高度误差el以及卷扬机构卷扬速度与目标速度的误差吊物当前位置及预期高度由当前绳缆长度及预期绳缆长度代替,公式表示为:
25、
26、其中l和ld分别为起重机卷扬机构当前绳缆长度及预期绳缆长度,和分别为仿真绳长及摆角后的绳长。
27、作为本发明所述的大型水电站厂房桥机小车行走自动定位方法的一种优选方案,其中:在所述起重机静止至开始加速阶段,采用输入整形法消除起重机摆角,同时保证起重机在最短时间内达到最大运行速度以及最大运输效率,通过小车电机编码器获得起重机位移,由此计算出当前时刻起重机小车与目标卸货点距离,并设定模糊控制距离阈值,当起重机大小车达到阈值范围内,起重机由匀速行驶进入模糊控制阶段,最终实现停车时刻防摇与定位同时完成的目的。
28、本发明还提供一种大型水电站厂房桥机小车行走自动定位系统,包括:
29、传感器,用于检测小车位移、吊具绳长、吊具摆角;
30、位置检测系统,用于实时检测小车的位置;
31、位置控制系统,用于控制小车的移动方向和距离;
32、模糊控制系统,用于对小车的位置和负载的摆动同时进行控制。
33、一种计算机设备,包括:存储器和处理器;所述存储器存储一种计算机设备,包括:存储器和处理器;所述存储器存储有计算机程序,其特征在于:所述处理器执行所述计算机程序时实现本发明中任一项所述的方法的步骤。
34、一种计算机可读存储介质,其上存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现本发明中任一项所述的方法的步骤。
35、本发明的有益效果:本发明提供的大型水电站厂房桥机小车行走自动定位方法通过布置传感器采集数据,实现自动采集、监测,分析桥机运行的准确位置数据,为了确保桥机在作业过程中的稳定性,专门为其设计有防摇摆技术,能有效减少重物在吊装过程中的摇摆,有助于提高桥机的工作效率,有助于桥机实现定位。防摇摆技术使得桥机不管是起动、停止还是加速、减速都只是轻微晃动。
- 还没有人留言评论。精彩留言会获得点赞!