交叉带式分拣机的下包控制方法、系统及装置与流程
本发明涉及物流分拣,具体涉及一种交叉带式分拣机的下包控制方法、系统及装置。
背景技术:
1、随着物流行业的发展,每天需要运输的包裹越来越多,对物流时间要求也越来越高,传统的分拣机已不能满足物流分拣的需求。交叉带式分拣机与传统的分拣机相比,分拣效率更高。
2、交叉带式分拣机是一款物流环形分拣设备,多个分拣托盘沿着环形轨道循环运动,沿着环形轨道铺设下包口,载有包裹的分拣托盘运动到其包裹地址信息对应的下包口时,分拣托盘通过分拣托盘上的驱动机构将包裹卸入下包口中,从而实现可靠、快速、高效和精准分拣。
3、现有的交叉带式分拣机的下包控制系统中,为了提高分拣效率,通常采用增加分拣托盘数量或者增加扫码相机数量的方法,但是为了保证分拣的准确度,又不得不降低分拣托盘的速度。因此,在现有的控制系统中,增加了硬件成本,且分拣速度和效率不高,使交叉带式分拣机不能很好地满足客户的分拣需求。
技术实现思路
1、有鉴于此,有必要提供一种快速高效和精准分拣的交叉带式分拣机的下包控制方法、系统及装置。
2、一种交叉带式分拣机的下包控制方法,所述方法包括以下步骤:
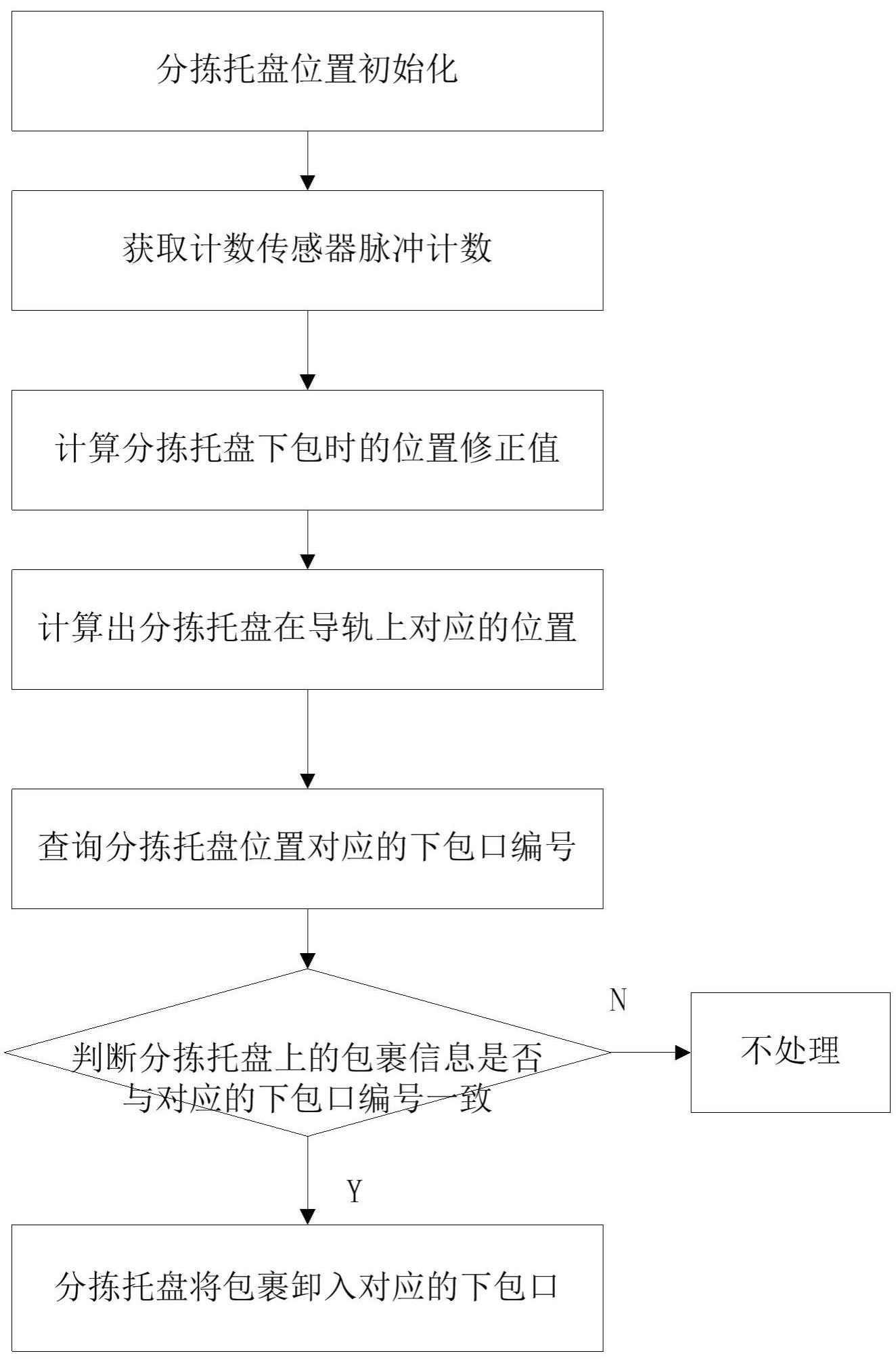
3、步骤一,分拣托盘位置初始化;
4、步骤二,采集脉冲计数器传感器的脉冲计数;
5、步骤三,采用插值法,根据两个脉冲之间的时间差,实时计算分拣托盘下包时的位置修正值;
6、步骤四,将两个脉冲之间的时间差进行离散化处理,以离散后的时间差为基准,计算运行中的分拣托盘在环形导轨中对应的位置;
7、步骤五,根据分拣托盘位置查询该位置对应的下包口编号;
8、步骤六,判断分拣托盘上的包裹地址信息对应的下包口编号与分拣托盘位置的下包口编号是否匹配,若匹配则进行下包操作。
9、优选地,所述分拣托盘位置初始化的具体步骤包括:
10、对环形轨道上的每一个分拣托盘按顺序编号,编号k的范围为:1≤k≤n,相邻的两个分拣托盘之间的距离相等;
11、设置零位传感器,在1号分拣托盘上设置零位传感器感应装置;
12、1号分拣托盘到达零位传感器时,系统将1号分拣托盘的位置清零,定义为初始位置;
13、后续每个分拣托盘的初始位置为(n-1)* d,其中, d为相邻的分拣托盘之间的距离。
14、优选地,所述采集脉冲计数器传感器的脉冲计数的具体步骤包括:
15、设置脉冲计数传感器,脉冲计数传感器与零位传感器之间的距离小于d;
16、每一个分拣托盘经过脉冲计数传感器时,脉冲计数传感器的脉冲计数n的值增加1;
17、当编号为k的分拣托盘经过脉冲计数传感器时,脉冲计数传感器的脉冲计数值n=k。
18、优选地,所述采用插值法,根据两个脉冲之间的时间差,实时计算分拣托盘下包时的位置修正值的具体步骤包括:
19、设定分拣托盘运行的最低速度为和最高速度为,在[,]之间取m个采样点,记录每个速度采样点对应的脉冲时间差,j的取值范围为:1≤j≤m,则,对应的脉冲时间差为,对应的脉冲时间差为,;
20、通过实际调试测试,得到m个采样点中每一个对应的精准下包位置修正值,并保存在系统中;
21、根据分拣托盘在导轨上运行的不同速度,实时计算出脉冲时间差t,并判断出t处于哪两个采样点和之间,即;
22、根据插值法,实时计算出下包位置修正值p,如公式(1)所示:
23、+(1);
24、其中,p为分拣托盘下包时的位置修正值,pj为对应的位置修正值,pj+1为对应的位置修正值。
25、优选地,所述将两个脉冲之间的时间差进行离散化处理,以离散后的时间差为基准,计算运行中的分拣托盘在环形导轨中对应的位置的具体步骤包括:
26、将两个脉冲之间的时间差 t进行离散化,将时间差 t均分成等份,则,;
27、以为分拣托盘位置计数查询周期,每经过一个查询周期,系统对分拣托盘在导轨上的位置进行一次计算,定位精度的计算公式(2)所示:
28、(2);
29、其中, i为常数,为定位精度,即,将相邻分拣托盘之间的间距 d等分为 i等份。
30、计算分拣托盘在环形导轨上对应的位置;
31、分拣托盘在环形导轨上的位置测量值如公式(3)所示:
32、+d*(n-1)+*ni(3)
33、其中,为实际测量的第n个分拣托盘在导轨上的位置值,为第n个分拣托盘的初始位置值,n为脉冲计数值,ni为查询周期数;
34、分拣托盘在环形导轨上的位置如公式(4)所示:
35、+p(4)
36、其中,为第n个分拣托盘的实际位置值与对应位置修正值的和。
37、优选地,所述根据分拣托盘位置查询该位置对应的下包口编号的具体步骤包括:
38、每隔一个分拣托盘位置查询周期,分拣托盘系统查询一下分拣托盘在导轨上的位置对应的下包口编号。
39、优选地,所述判断分拣托盘上的包裹地址信息对应的下包口编号与分拣托盘位置的下包口编号是否匹配,若匹配则进行下包操作的具体步骤包括:
40、相机扫码系统读取包裹上的条码信息并解析,将解析出来的下包口信息传递给分拣托盘系统;
41、分拣托盘控制系统根据分拣托盘位置查询周期,计算分拣托盘位置和位置修正值,得到分拣托盘所在位置的下包口编号;
42、比较分拣托盘所在位置的下包口编号与分拣托盘上的包裹地址信息对应的下包口编号是否一致;
43、若编号一致,则分拣托盘控制系统控制分拣托盘进行下包操作,否则不做处理。
44、以及,一种交叉带式分拣机的下包控制系统,用于实施如上所述的下包控制方法,所述系统包括:
45、分拣托盘结构单元,用于承载包裹;
46、直线电机单元,用于驱动分拣托盘在环形导轨上移动;
47、分拣托盘控制单元,用于计算分拣托盘在环形导轨上的位置,查询和判断是否需要下包,并控制分拣托盘进行下包操作;
48、脉冲采集单元,用于读取零位传感器和脉冲计数传感器的触发脉冲;
49、相机扫码单元,用于扫描分拣托盘上的包裹的地址信息,并传送至分拣托盘控制单元进行地址解析。
50、以及,一种交叉带式分拣机的下包控制装置,用于实现上所述的下包控制方法,所述下包控制装置包括环形导轨、多个分拣托盘和相机扫码装置,多个所述分拣托盘依次设置于所述环形导轨上,并沿着所述环形导轨移动,每个所述分拣托盘依次进行编码1~n,相邻的两个所述分拣托盘之间的距离相等;所述环形导轨包括上包口段和下包口段,所述相机扫码装置设于所述上包口段和所述下包口段之间,所述相机扫码装置用于扫描所述分拣托盘上的包裹的地址信息。
51、优选地,所述环形导轨上还设有直线电机、零位传感器和脉冲计数传感器,所述直线电机用于驱动多个所述分拣托盘沿所述环形导轨移动;所述零位传感器和所述脉冲计数传感器分别设于所述上包口段与所述下包口段之间,所述脉冲计数传感器与所述零位传感器之间的距离小于相邻的两个所述分拣托盘之间的距离;第一个所述分拣托盘上设有零位传感器感应装置,所述零位传感器用于感应第一个所述分拣托盘的位置,所述脉冲计数传感器用于感应每一个所述分拣托盘位置。
52、上述交叉带式分拣机的下包控制方法、系统及装置中,通过采集所述脉冲计数传感器的脉冲计数,根据脉冲计数,实时准确地计算出所述分拣托盘在所述环形导轨上的运动时,在不同速度下需要调整的下包位置修正值及所述分拣托盘在所述环形导轨上所处的位置,再通过判断所述相机扫码装置扫描解析出的包裹信息与下包口编号是否匹配,以实现可靠、快速和精准地进行下包操作,既满足了客户对分拣机的分拣需求,又降低了装置的硬件成本。本发明的结构简洁,计算方法合理、精确、高效,易于实现,成本低廉,便于推广。
- 还没有人留言评论。精彩留言会获得点赞!