用于机器人乘梯的调配方法与流程
本发明涉及电梯领域,具体涉及一种用于机器人乘坐电梯的调配方法。
背景技术:
1、近些年来,机器人(自主移动体)乘坐电梯以实现跨楼层移动逐渐成为电梯领域的一个研究热点。
2、机器人乘梯包括机器人与电梯交互、机器人进入轿厢后的位置规划、机器人与乘客的混合乘梯等多个方面,如:
3、cn202110480588.5提出一种机器人与电梯的通信方法、装置和系统,其中,方法包括:第一通信基站接收机器人发送的控制指令,第一通信基站判断电梯是否位于第一通信基站的辐射范围之内,如果电梯位于第一通信基站的辐射范围之内,则第一通信基站将控制指令发送至电梯,如果电梯不位于第一通信基站的辐射范围之内,则第一通信基站向与第一通信基站相邻的第二通信基站转发控制指令。本技术通过在相应楼层设置通信基站,实现将机器人发送的控制指令,转发给电梯,由于转发过程中不需要耗费资讯流量也不需要设置后台服务器,因此降低了通信成本、提高了可靠性。
4、cn202180020588.5提出:在具有电梯控制系统和由电梯控制系统控制的电梯轿厢的电梯设备中,电梯控制系统被配置为通过呼叫终端接收来自人员的电梯呼叫并且通过无线电收发器接收来自机器人的电梯呼叫,以此实现与电梯控制系统间的通信。电梯设备的当前运输能力由电梯控制系统确定,其中运输能力指示电梯设备的当前使用情况。经由无线电收发器从机器人发起的电梯呼叫被电梯控制系统识别,其中来自机器人的电梯呼叫包括由机器人的调度员设置的优先级级别(pl),其中优先级级别(pl)是高优先级范围、中优先级范围和低优先级范围中的一者,其中电梯呼叫指示登梯楼层。在优先级级别被设置为中优先级范围并且当前运输能力低于第一阈值的情况下,或者在优先级级别被设置为低优先级范围并且当前运输能力低于第二阈值的情况下,延迟将从自机器人发起的电梯呼叫分配给电梯轿厢。
5、cn201680089621.9提供的能够在轿厢内按照下梯顺序重新排列多个自主移动体的电梯系统具有:运转控制部,其根据从自主移动体发送的表示目的地楼层的信息使轿厢移动和停止,该自主移动体具有移动机构和移动控制部,能够乘降电梯的轿厢;对象选择部,其选择轿厢内的自主移动体以及此后马上要搭乘轿厢的自主移动体作为重新排列对象;下梯顺序决定部,其根据由对象选择部选择出的作为重新排列对象的自主移动体各自的目的地楼层,决定作为重新排列对象的自主移动体的下梯顺序;以及重新排列指示部,其将表示由下梯顺序决定部决定的下梯顺序的信息发送到作为重新排列对象的各个自主移动体。
6、现有技术涉及到机器人在乘坐电梯时的调配时,通常是考虑多个机器人进入轿厢时的顺序(目的在于下梯时的便捷)等问题,尚未有真正从电梯运送机器人的运送效率出发考虑机器人乘梯的调配问题。
技术实现思路
1、本发明要解决的技术问题是如何适当调配机器人使得电梯能够高效地实施对机器人的运送。
2、为了解决上述技术问题,本发明公开了一种用于机器人乘梯的调配方法,所述电梯同一时刻最多运送一台机器人,其特征在于,所述调配方法包括如下步骤:
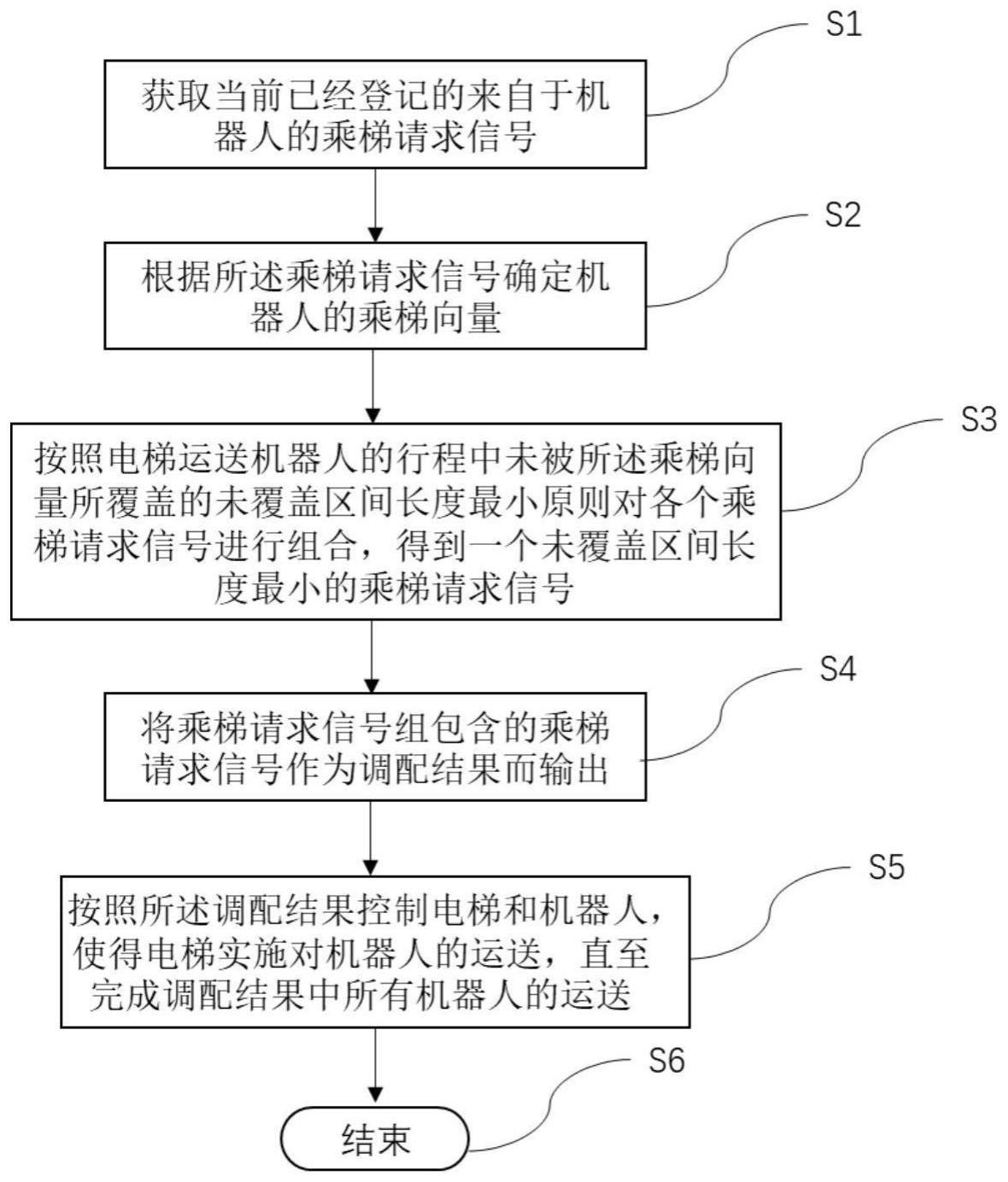
3、步骤s1、获取当前已经登记的来自于机器人的乘梯请求信号,所述乘梯请求信号至少包括机器人的标识、出发楼层和目的楼层;
4、步骤s2、根据所述乘梯请求信号确定机器人的乘梯向量,所述乘梯向量为由机器人的出发楼层指向目的楼层的有向线段;
5、步骤s3、按照电梯运送机器人的行程中未被所述乘梯向量所覆盖的未覆盖区间长度最小原则对各个乘梯请求信号进行组合,得到一个未覆盖区间长度最小的乘梯请求信号组;
6、步骤s4、将乘梯请求信号组包含的乘梯请求信号作为调配结果而输出;
7、步骤s5、按照所述调配结果控制电梯和机器人,使得电梯实施对机器人的运送,直至完成调配结果中所有机器人的运送;
8、步骤s6、结束。
9、优选地,所述步骤s3进一步包括:子步骤s3-1:根据所述乘梯请求信号确定电梯本次运送机器人的行程;子步骤s3-2:按照所述行程范围内未被所述乘梯向量所覆盖的未覆盖区间长度最小原则对各个乘梯请求信号进行组合,得到一个未覆盖区间长度最小的乘梯请求信号组。
10、优选地,所述子步骤s3-1将满足第一条件的乘梯请求信号定义为特定乘梯请求信号,并根据所述特定乘梯请求信号确定电梯本次运送机器人的行程,所述第一条件包括:条件1、乘梯请求信号的所述乘梯向量与电梯运行方向一致;条件2、乘梯请求信号的出发楼层位于电梯轿厢当前所在楼层相对于电梯运行方向的前方。
11、优选地,所述子步骤s3-1按照如下任一方式确定所述行程的起点:
12、方式1、当电梯轿厢停靠在轿厢内机器人的目的楼层时,将轿厢内机器人的目的楼层作为所述行程的起点;
13、方式2、当电梯在完成上一次的机器人运送后停止在某个楼层不动时,将当前停靠楼层作为所述行程的起点;
14、方式3、当电梯在某个楼层被唤醒时,将唤醒楼层作为所述行程的起点;
15、方式4、当电梯完成一次行程且反转方向时,将反转方向的楼层作为所述行程的起点;
16、方式5、将所述特定乘梯请求信号的出发楼层中距离方式1-方式4确定的所述起点最近的出发楼层作为所述行程的起点;
17、方式6、当电梯轿厢内有机器人且处于移动状态时,将轿厢内机器人的目的楼层作为所述行程的起点。
18、优选地,所述步骤s3-1从所述特定乘梯请求信号的各个目的楼层中选择距离电梯轿厢当前所在楼层或所述行程的起点最远的目的楼层作为所述行程的终点。
19、优选地,当采用方式5确定所述行程的起点时,所述步骤s3-1按照如下步骤确定所述行程的终点:
20、步骤a1、根据所述起点确定以该起点为出发楼层的所述乘梯向量并将其作为第一乘梯向量,同时将对应于所述第一乘梯向量的乘梯请求信号添加到所述乘梯请求信号组中;
21、步骤a2、从所有未被添加到所述乘梯请求信号组中的乘梯向量的乘梯请求信号中,选择出发楼层与所述第一乘梯向量的终点间的距离最小的乘梯向量并将其作为第二乘梯向量;
22、步骤a3、判断所述第二乘梯向量的乘梯方向是否与第一乘梯向量的方向一致,若一致则进入下一步骤,否则将所述第一乘梯向量的终点作为所述行程的终点,结束;
23、步骤a4、将对应于所述第二乘梯向量的乘梯请求信号添加到所述乘梯请求信号组中;
24、步骤a5、将所述第一乘梯向量更新为第二乘梯向量,返回步骤a2。
25、优选地,当采用方式5确定所述行程的起点时,所述步骤s3-1按照如下步骤确定所述行程的终点,从所述乘梯请求信号的各个目的楼层中选择乘梯向量与电梯当前运行方向相反,且距离电梯轿厢当前所在楼层或所述行程的起点最远的目的楼层作为所述行程的中间点,利用所述行程的中间点将所述行程分成与电梯的当前运行方向一致的第一子行程和与电梯的当前运行方向相反的第二子行程,然后从满足所述第一条件的乘梯请求信号中为所述第一子行程分配使得第一子行程中未被覆盖的区间最小的特定乘梯请求并将其作为第一子行程的调配结果,然后从满足第二条件的乘梯请求信号中为所述第二子行程分配使得第二子行程中未被覆盖的区间最小的特定乘梯请求并将其作为第二子行程的调配结果,最后将第一子行程的调配结果和第二子行程的调配结果合并在一起得到整个子行程的完整调配结果,所述第二条件为乘梯请求信号的所述乘梯向量与电梯当前运行方向相反。
26、优选地,当采用方式5确定所述行程的起点时,所述步骤s3-1按照如下步骤确定所述行程的终点:
27、步骤b1、根据所述起点确定以该起点为出发楼层的所述乘梯向量并将其作为第一乘梯向量,同时将对应于所述第一乘梯向量的乘梯请求信号添加到所述乘梯请求信号组中;
28、步骤b2、从所有未被添加到所述乘梯请求信号组中的乘梯向量的乘梯请求信号中,选择出发楼层与所述第一乘梯向量的终点间的距离最小的乘梯向量并将其作为第二乘梯向量;
29、步骤b3、判断所述第二乘梯向量的乘梯方向是否与第一乘梯向量的方向一致,若一致则进入下一步骤,否则进入步骤b6;
30、步骤b4、将对应于所述第二乘梯向量的乘梯请求信号添加到所述乘梯请求信号组中;
31、步骤b5、将所述第一乘梯向量更新为第二乘梯向量,返回步骤b2;
32、步骤b6、将计数器加1,并判断计数器的当前值是否等于2,若是则将所述第二乘梯向量的终点作为行程的终点,结束,否则返回步骤b4,所述计数器的初始值为0。
33、优选地,所述步骤s3-2按照如下步骤得到所述乘梯请求信号组:
34、步骤c1、确定电梯轿厢的当前所在楼层;
35、步骤c2、从所有乘梯向量中选择以出发楼层距离电梯轿厢当前楼层最近的乘梯向量并将其作为第一乘梯向量,并将所述第一乘梯向量的乘梯请求信号添加至所述乘梯请求信号组;
36、步骤c3、从所有未被选择过的乘梯向量中选择出发楼层距离所述第一向量的终点最近的乘梯向量并将其作为第二乘梯向量,并将所述第二乘梯向量的乘梯请求信号添加至所述乘梯请求信号组;
37、步骤c4、判断是否还有未被选择过的乘梯向量,若是,返回步骤c2,否则进入步骤c4;
38、步骤c5、输出所述乘梯请求信号组。
39、优选地,所述乘梯请求信号组包括其中的乘梯请求信号及其添加次序,所述步骤s5根据所述添加次序对机器人和电梯进行控制。
40、优选地,所述调配方法在步骤s5后还包括:
41、步骤s6、判断是否接收到新的乘梯请求信号,若是则进入下一步骤,否则继续执行步骤s5;
42、步骤s7、以当前电梯轿厢内机器人的目的楼层为电梯所在楼层进行重新调配,并在电梯抵达当前电梯轿厢内机器人的目的楼层且机器人下梯后按照重新调配的调配结果再次执行步骤s5。
43、优选地,所述调配方法在步骤s5后还包括:
44、步骤s8、在执行步骤s5的过程中接收到新的乘梯请求信号时,继续执行步骤s5直至完成上一次调配结果中的所有机器人的运送后,将步骤s1中的乘梯请求信号更新为当前所有接收到但尚未运送的乘梯请求信号,然后转入步骤s2。
45、优选地,当需要考虑机器人的候梯时间长短时,根据机器人的候梯时间为其乘梯向量赋予不同的权重,将前述任一权利要求中的未被覆盖的区间的长度或距离等替换为区间长度与权重的乘积或距离与权重的乘积。
46、有益技术效果
47、本发明的机器人乘梯调配方法通过最小化乘梯向量间的间隔长度,可以实现电梯运送机器人的效率的最大化。
- 还没有人留言评论。精彩留言会获得点赞!