用于运行输送系统的方法和输送系统与流程
本发明涉及一种用于运行输送系统、尤其多载具系统的方法,所述输送系统包括多个线性电机和多个输送元件,这些线性电机彼此紧靠地依次布置并且具有导轨,这些输送元件借助所述线性电机能够沿所述导轨运动。
背景技术:
1、在运行这种输送系统时的挑战通常在于避免输送元件相互间的碰撞,并且尤其是在大量输送元件沿导轨运动的情况下。为了提高输送系统的容量,多个输送元件应以尽可能高的速度沿导轨运动。然而另一方面在高速情况下也会提高碰撞的风险。
2、例如输送元件可能会从输送系统的控制单元获得指令,沿导轨向特定的目标位置行驶。然而如果该目标位置已经被一个或多个输送元件阻塞,该输送元件就必须首先运行至维修位置,该维修位置取决于处于目标位置的输送元件的数量、与前方输送元件的必要距离以及有时输送元件所输送的产品的尺寸。然后必须反复计算位置,直至目标位置已经清空了其他的输送元件并且该输送元件可以移动至目标位置。
3、此外还可能会发生的是,前方输送元件更缓慢地运动。那么就必须避免后方的输送元件追尾前方输送元件。而且前方输送元件的速度的变化在此也必须被监控,以便避免追尾。
4、传统的解决方案通常规定,使用中央控制器,其通常周期性地监控输送元件的间距。在两个输送元件面临碰撞风险时,为避免该碰撞而使输送系统的所有输送元件都停止。随后必须麻烦地重新启动所有的输送元件,其中,整个设备都必须在特定的时间内停止运行,而且生产线必须停止。
技术实现思路
1、本发明所要解决的技术问题在于,提供一种用于运行输送系统的方法和一种输送系统,其改进地避免碰撞或间距不足。
2、所述技术问题按照本发明通过一种用于运行输送系统、尤其多载具系统的方法和一种输送系统、尤其多载具系统解决。有利的设计方案由说明书和附图给出。
3、根据本发明的方法用于运行输送系统、尤其多载具系统,所述输送系统包括多个线性电机和多个输送元件,这些线性电机彼此紧靠地依次布置并且具有导轨,这些输送元件借助所述线性电机能够沿所述导轨运动,其中,所述方法具有以下步骤:
4、-针对多个输送元件中的第一输送元件生成行驶任务,用于沿着所述导轨的至少一个子区段行驶,
5、-基于预定的运动特征值生成用于该行驶任务的第一输送元件的第一运动特征曲线,
6、-将所述第一运动特征曲线与紧接在第一输送元件前方的第二输送元件的第二运动特征曲线相比较,并且确定在实施该行驶任务时是否低于所述第一输送元件与所述第二输送元件之间的预定的最小间距,
7、-如果确认低于所述最小间距,则更新所述第一运动特征曲线,以便维持所述最小间距,并且
8、-控制所述线性电机,以便使所述第一输送元件按照所述第一运动特征曲线运动。
9、输送元件的运动特征曲线通常包括沿导轨的位置关于时间的至少一个变化曲线,从而能够准确地确定输送元件在哪个时刻处于沿子区段的哪个位置。为了能够计算位置变化曲线,还可以考虑速度、加速度和顿挫关于时间的变化曲线。在此,“顿挫”表示加速度随时间的变化率。输送系统的操作者尤其可以预先给定特定的极限值。例如可以针对每个输送元件和/或针对不同的行程区段预先给定速度、加速度和顿挫的极限值。由此可以例如规定,在导轨的弯道区域中降低输送元件的速度,以便避免该输送元件从导轨脱离或者丢失运载的负载。
10、第二输送元件是沿导轨紧接着或直接位于第一输送元件前方的输送元件或者紧接着或直接在第一输送元件前方行驶的输送元件,其中,“紧接或直接”表示在第一输送元件与第二输送元件之间不存在其他的输送元件或者没有其他输送元件在第一输送元件与第二输送元件之间行驶。
11、在比较第一运动特征曲线与第二输送元件的第二运动特征曲线时,首先确保这两个运动特征曲线在时间轴方面是相同的,也就是说必要时将时间轴相互匹配,以便使其能够相比较。随后将所考虑的第一输送元件的运动特征曲线与前方行驶或位于前方的第二输送元件的运动特征曲线进行比较,并确定两个运输元件的位置的差分随时间的变化曲线,以便确认是否在执行行驶任务时的任何时刻都低于预定的最小间距。预定的最小间距在此尤其可以由输送系统的操作者给定。当仅应避免碰撞时,也可以将最小间距降低为零。
12、如果确认未低于该最小间距,则输送元件就可以仍执行其行驶任务。相反,如果确认低于该最小间距,则按规定更新第一运动特征曲线,从而确保最小间距。例如规定,为此针对整个行驶任务或者部分行驶任务降低第一输送元件的速度。
13、最后,控制线性电机,以便按照必要时更新的第一运动特征曲线执行行驶任务。
14、由此可以在第一输送元件出发之前就获知是否可能与前方行驶的输送元件发生碰撞或者低于最小间距。也就是说预测地考虑输送元件的运动,而不必在行驶任务过程中周期性地反复计算近似估计。此外,本发明还提供了去中心地考虑最小间距的不足,其中,始终仅一个输送元件与相应的在先行驶的输送元件共同考虑。与集中考虑整个系统相比,这显著地简化了对整个系统的考虑。
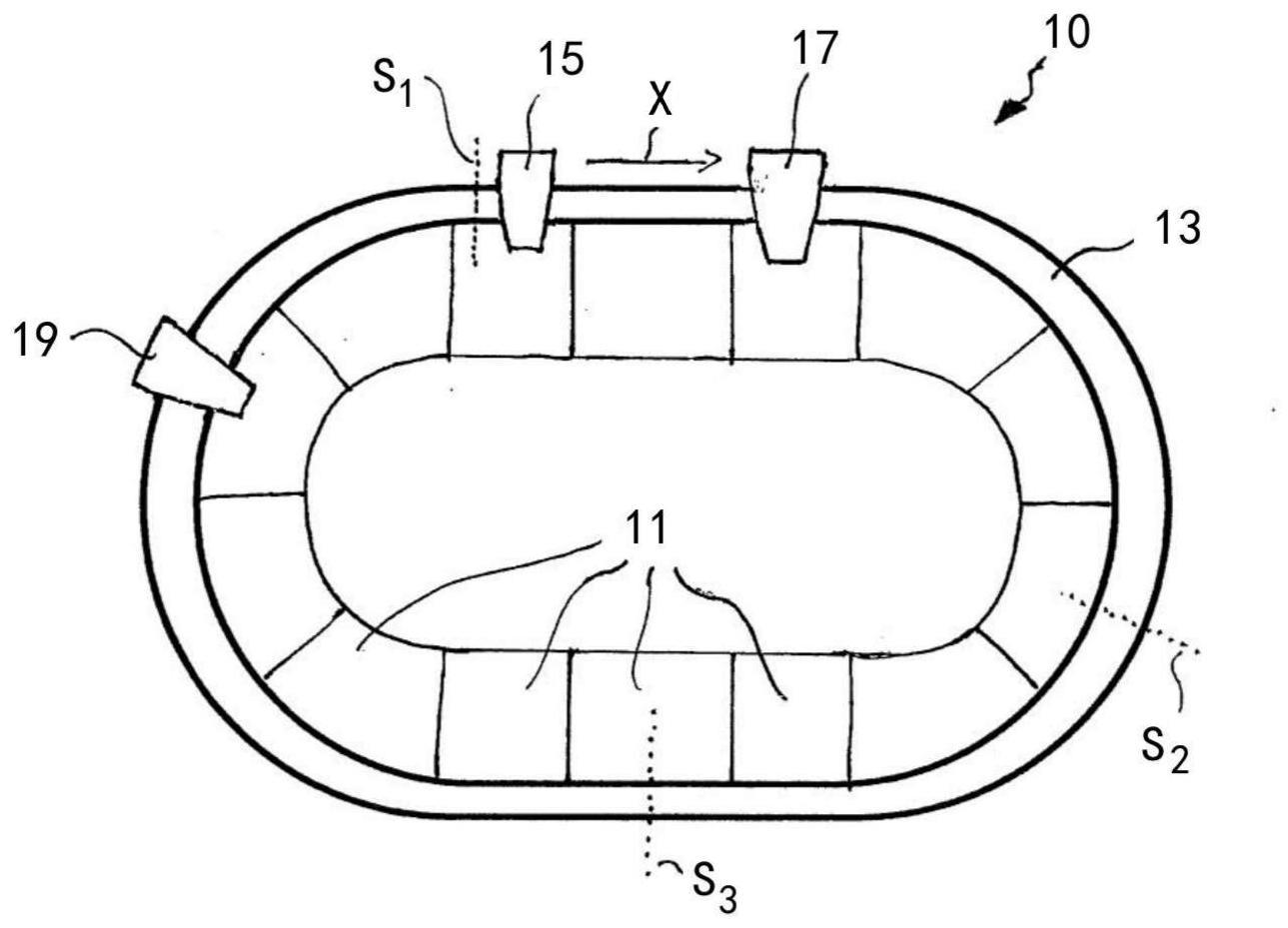
15、每个线性电机都可以尤其具有六个外表面,也即顶面、底面、内侧面、外侧面和两个侧向面。在此,两个相邻的线性电机的侧向面通过约为0.1mm至0.2mm的较小的膨胀间隙相互间隔或者直接相互贴靠。在外侧面上可以构造用于输送元件的导轨。内侧面布置在输送系统的内部空间的区域中。
16、输送系统或者说多载具系统可以环绕地构造,从而使多个线性电机构成闭合的导轨,一个或多个输送元件沿该导轨理论上沿同一方向循环地运动。然而还可行的是,多个线性电机构成具有起点和终点的开放式的导轨。沿该导轨可以布置多个站点,然而这些站点通常仅虚拟地存在并且例如通过导轨的坐标定义。该类型的站点是用于输送元件的可能的起点和终点。例如某个输送元件可以获得使其从一个站点驶向另一个站点的行驶任务,这相当于导轨的子区段。此外,还可以在站点处执行动作,例如特定数量的先后依次的输送元件的耦连或脱耦,或者某个输送元件的维修,直至特定数量的输送元件处于该站点或该站点的队列中。
17、输送元件尤其以磁性方式驱动。为此,输送元件具有一个或多个永磁体,所述永磁体借助由线性电机所生成的变化的和/或迁移的磁场被加载驱动力。驱动力实现了输送元件沿导轨的运动。多个输送元件尤其可以相互无关地并且独立地运动。由此可以借助输送元件将例如工件或产品沿导轨输送。
18、为了将输送元件保持在导轨上,优选借助相对于输送元件的运动方向垂直的方向的吸引力将输送元件拉向导轨。由此,吸引力垂直于驱动力地延伸。吸引力优选从导轨朝线性电机或者说朝线性电机的线圈延伸。吸引力通常由此生成,即,输送元件的磁体被相应的线性电机的导磁的定子吸引。
19、输送元件还可以作为载具、搬运体或动子,相反,线性电机则也被称为定子。
20、优选地,如果确认发生了触发事件,则更新所述第一运动特征曲线。该运动特征曲线的重新生成尤其也可以发生在第一输送元件已经为了执行行驶任务而出发之后。在重新生成第一运动特征曲线时,重复之前提到的步骤,也就是说当前有效的第一运动特征曲线与可能已经改变的、当前有效的第二运动特征曲线相比较。如果识别出低于最小间距,则重新更新第一运动特征曲线。
21、在此原则上,可能影响第一输送元件与第二输送元件之间的间距的任何事件都可以用作触发事件。所述触发事件尤其可以是所述第二输送元件的顿挫的变化。如果第二输送元件的顿挫被确认,则该顿挫可以表明第二输送元件的制动,因此就要降低两个输送元件之间的间距。相应地,在顿挫发生变化时,需要检查是否仍遵守最小间距。如果前方行驶的输送元件的顿挫变化被选定为触发事件,这导致速度的变化被极其迅速地识别,并且可以几乎实时地重新生成后方的输送元件的运动特征曲线。
22、此外,在发生所述触发事件时,还可以更新紧接着第一输送元件后方的第三输送元件的第三运动特征曲线,从而不会发生第三输送元件对第一输送元件的追尾。相应地,这可以影响可能存在的其他的后方输送元件。
23、在有利的设计方式中,所述第一运动特征曲线与所述第二运动特征曲线的比较包括计算所述第一输送元件与所述第二输送元件之间的间距的间距轨迹。间距相当于两个输送元件的位置的差分关于时间的变化曲线。由此可以确认,如果执行行驶任务,何时以及是否低于预定的最小间距。
24、在更新所述第一运动特征曲线时,所述第一输送元件的速度可以降低至或者低于所述第二输送元件的速度。这尤其可以自第一输送元件接近第二输送元件至最小间距的时刻起发生。从该时刻起,第一输送元件在第二输送元件后方以相同速度行驶,从而保持最小间距。
25、所述运动特征值可以包括最大速度、最大加速度和顿挫的量,并且同样地包括边界条件的给定以及在不出现低于最小间距时在理想情况下达到的值。
26、运动特征曲线的生成和/或更新尤其包括确定具有不变的顿挫的时间段以及计算最大实际加速度和最大实际速度。尤其可以由顿挫的量确定出现该顿挫的时长。此外,由此还可以通过积分确定加速度、速度和位置的变化曲线。
27、例如可以将行驶任务的路程首先分成加速区段、具有恒定速度的区段和减速区段。随后,加速区段和减速区段同样地也可以又分成具有不变的正顿挫的区段和具有不变的负顿挫的区段。由此针对行驶任务形成多个具有不变的顿挫的时间段,其相应的时长能够基于行驶任务和运动特征值确定。
28、根据本发明的输送系统、尤其多载具系统包括多个线性电机和多个输送元件,这些线性电机彼此紧靠地依次布置并且具有导轨,这些输送元件借助所述线性电机能够沿所述导轨运动。所述输送系统还包括控制单元,所述控制单元构造用于实施前述的方法。
29、此外,有关根据本发明的方法的表述也相应地适用于根据本发明的输送系统。
- 还没有人留言评论。精彩留言会获得点赞!