一种悬挂式空中运输小车及物料搬运方法与流程
本发明属于搬运机械,具体涉及一种悬挂式空中运输小车及物料搬运方法,可用于实现自动搬运半导体magazine工件。
背景技术:
1、半导体车间的物料转运大多采用自动化形式进行,但针对magazine工件在机台和人工检验台间的流转大部分依然是人工进行搬运,搬运过程存在车间过道狭窄、易产生振动损伤工件,重复劳动多等缺点。现有的magazine工件转移设备,其功能较单一,抓取过程中缺乏可靠的安全避障和防设计,容易对工件产生损伤,降低了magazine工件的转移效率和运输质量。
技术实现思路
1、技术目的:针对上述技术问题,本发明提出了一种悬挂式空中运输小车及物料搬运方法,采用单轨行走驱动模块的结构形式,各组件的布局合理,具有自动抓取模块、垂直升降模块、横向移动模块和安全避障模块等,通过设置多个夹爪的自动抓取结构,提升了小车的运输效率,能够实现magazine工件在机台和检验台之间的自动、高效和准确地流转。
2、技术方案:为实现上述技术目的,本发明采用了如下技术方案:
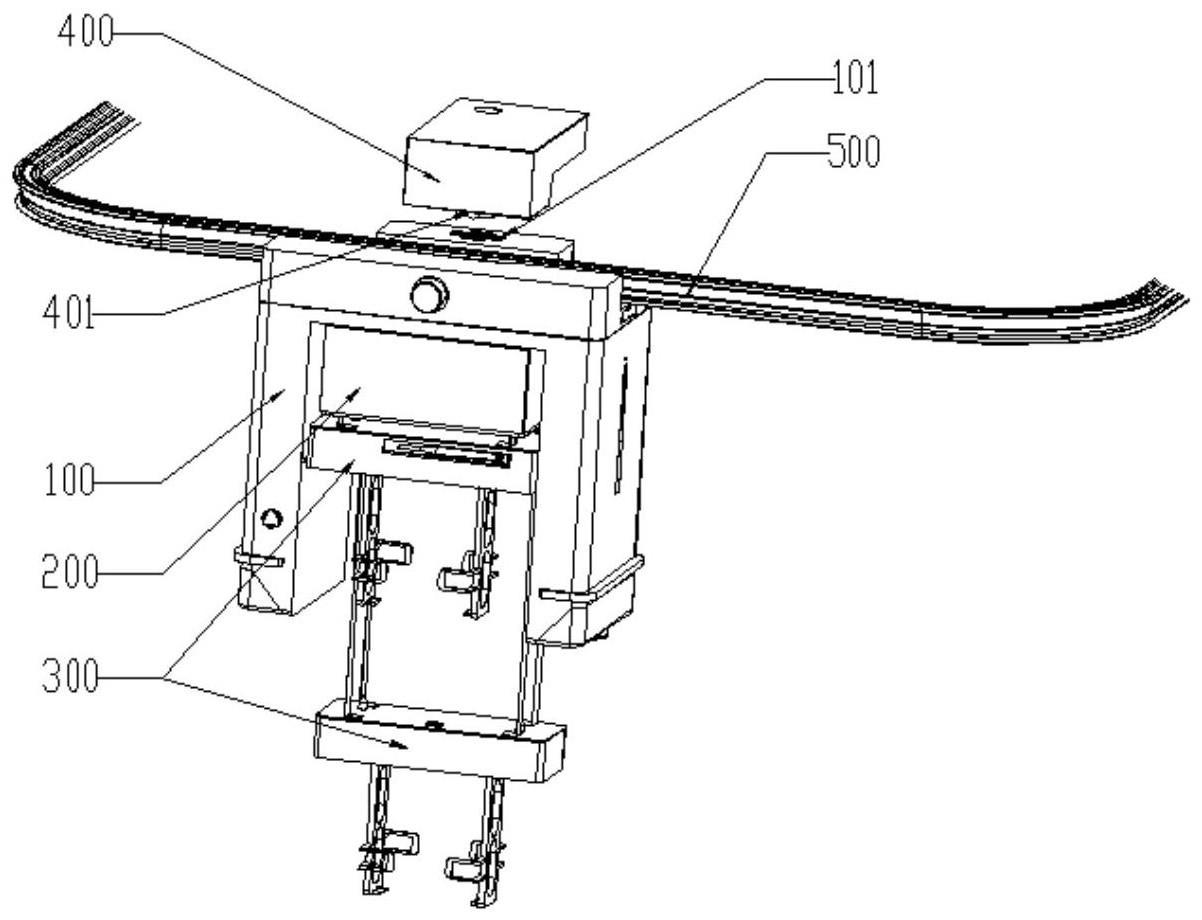
3、一种悬挂式空中运输小车,其特征在于:包括行走驱动模块、横移和垂直升降模块、自动抓取模块、充电桩和轨道;
4、所述行走驱动模块包括中间挡板、设置于中间挡板底部两侧的第一挡板和第二挡板,第一挡板和第二挡板形成贯通空间;中间挡板的顶壁与所述轨道之间设置第一驱动连接组件,用于实现行走驱动模块在所述轨道上前进或后退;
5、所述横移和垂直升降模块包括横移组件和位于横移组件下方的一个或多个垂直升降组件,横移组件和中间挡板的底壁之间设置第二驱动连接组件,用于实现所述横移和垂直升降模块在中间挡板的底部平移;
6、所述自动抓取模块包括设置于所述垂直升降组件底部的一个或多个夹爪组件,夹爪组件在水平和竖直方向上的位置由所述横移和垂直升降模块调节;
7、所述充电桩安装在行走驱动模块上;
8、所述中间安装板设有台面高度检测传感器和物料高度检测传感器,夹爪外壳上设置第二无线ap。
9、所述中间挡板的前壁上设置水平面激光雷达;第一挡板的底部设置视觉相机,第二挡板的底部设置竖直面激光雷达。
10、作为优选,所述第一驱动连接组件包括设置于中间挡板顶壁上的倾斜限位承重轮,每个倾斜限位承重轮设有对应的辅助竖直限位轮和驱动电机组件,倾斜限位承重轮和倾斜限位承重轮与所述轨道的结构配合,驱动电机组件用于驱动倾斜限位承重轮在所述轨道上前进或后退。
11、作为优选,所述第二驱动连接组件包括设置于中间挡板底部的滑块和设置于所述横移和垂直升降模块顶部的横移组件安装板;
12、所述横移组件安装于横移组件安装板的顶部,包括滑轨、横移伺服电机、横移同步轮、横移同步带、丝杠螺母座和第一丝杠,其中,滑轨的方向垂直于所述轨道,滑块与滑轨适配,横移伺服电机用于驱动横移同步轮转动,经过横移同步带传动安装在丝杠螺母座上的第一丝杠,驱动所述滑块和滑轨相对平移;
13、所述横移和垂直升降模块还包括横移模块外壳,横移模块外壳的底端和顶部均设有开口,内部用于容纳所述横移组件。
14、作为优选,所述横移和垂直升降模块还包括设置于横移组件安装板下方的升降组件安装底板;
15、所述升降组件安装底板的顶部设置侧面安装板、左侧中间轴和右侧中间轴,左侧中间轴和右侧中间轴分别通过一组侧面安装板固定在升降组件安装底板,左侧中间轴和右侧中间轴上相对设置多个皮带卷绕轮;
16、所述垂直升降组件包括相对设置的两对或两对以上的皮带卷绕轮、升降伺服电机和升降电机传动同步带,皮带卷绕轮之间通过左右轴同步带实现同步连接,升降伺服电机通过升降电机传动同步带连接其中一个皮带卷绕轮,位于左侧中间轴上的皮带卷绕轮设有左侧升降皮带,位于右侧中间轴上的皮带卷绕轮设有右侧升降皮带,左侧升降皮带和右侧升降皮带均从升降组件安装底板设置的通孔穿出,连接对应的夹爪组件;
17、各个皮带卷绕轮的外侧设置皮带限位滑轨和微动开关。
18、作为优选,所述自动抓取模块中,各个夹爪组件包括:上盖板、中间安装板、电机连接板和夹爪连接板,上盖板和中间安装板之间设有电池和pcb板,中间安装板的底部设有夹爪外壳、位于夹爪外壳内的电机连接板和夹爪连接板,电机连接板和夹爪连接板316的底部外侧设有位置相对的夹爪,电机连接板和夹爪连接板之间设置用于实现平移连接的滑块滑轨组件;
19、所述电机连接板上设置夹爪伺服电机、夹爪电机传动同步带和第二丝杠,夹爪连接板上设置丝杠安装座、左旋丝杠螺母座、右旋丝杠螺母座,丝杠安装座用于安装第二丝杠,左旋丝杠螺母座和右旋丝杠螺母座分别用于调节第二丝杠,夹爪伺服电机通过夹爪电机传动同步带传动第二丝杠,第二丝杠转动后带动电机连接板和夹爪连接板相对平移。
20、作为优选,所述充电桩安装在行走驱动模块的顶部,包括充电桩外壳、设置于充电桩外壳内的充电桩电气组件、电动推缸、导向杆和绝缘连接块,以及与绝缘连接块连接的充电刷块;
21、所述行走驱动模块设有与充电刷块适配的充电刷板;
22、所述电动推缸电信号连接充电桩电气组件,用于驱动导向杆并带动绝缘连接块和充电刷块移动,实现充电刷块与充电刷板的连接或脱离。
23、作为优选,所述横移和垂直升降模块的底部设有接触式pin母头,自动抓取模块的顶部设有接触式充电pin公头,接触式pin母头电气连接所述充电刷板,接触式pin母头和接触式充电pin公头连接后,为所述电池提供充电路径。
24、作为优选,所述行走驱动模块中,第一挡板的内侧壁上设置防坠落推杆,第一挡板的外侧壁上设置急停按钮和若干防撞条,中间挡板上设置读码器和人工牵引拉手,第二挡板的外侧壁上设置第一无线ap、若干防撞条、示廓灯和语音播报器。
25、一种悬挂式空中运输小车的物料搬运方法,其特征在于,悬挂式空中运输小车接收到物料搬运任务,即行走至检验台抓取待加工工件,或者行走至机台取料位抓取已加工工件,并将待加工工件放入机台的放料位;
26、所述搬运方法包括如下物料抓取步骤:
27、悬挂式空中运输小车通过行走驱动模块行走至检验台或机台;
28、悬挂式空中运输小车的横移和垂直升降模块沿垂直于轨道的方向移动,使自动抓取模块移动至待加工工件或已加工工件的正上方;
29、悬挂式空中运输小车通过行走驱动模块上设置的视觉相机识别待加工工件或已加工工件的信息,并识别检测台或机台的台面上是否有明显的异常障碍物,如果没有异常障碍物,则横移和垂直升降模块的升降组件工作,将自动抓取模块落下,抓取待加工工件或已加工工件;抓取过程中竖直面激光雷达和水平面激光雷达实时检测是否有障碍物靠近;
30、所述搬运方法包括如下放料步骤:
31、悬挂式空中运输小车带料行驶到机台放料位,横移和垂直升降模块沿垂直于轨道的方向移动,将抓有待加工物料的自动抓取模块移动到机台放料位正上方;
32、横移和垂直升降模块的升降组件工作,将丢抓取模块落下并放下物料,放料过程中竖直面激光雷达和水平面激光雷达实时检测是否有障碍物靠近;
33、悬挂式空中运输小车完成任务后行驶到接收任务等待点,等待下个任务。
34、有益效果:本发明提供了一种悬挂式空中运输小车,其采用单轨行走驱动模块的结构形式,各组件的布局合理,且可以设置多夹爪的自动抓取结构,提升小车的运输效率,通过设置激光雷达和视觉相机等手段,提高了了抓取和放料过程的安全可靠性。
- 还没有人留言评论。精彩留言会获得点赞!