一种数控升降设备控制方法及系统与流程
本发明属于升降设备控制,涉及到一种数控升降设备控制方法及系统。
背景技术:
1、移动剪叉式升降机作为辅助人员进行高空作业的可移动货物运输设备,具有提升效率和节约成本等多个特点,因此被广泛应用于建筑工地、电梯维修、装修等各个领域,为了保障移动剪叉式升降机的安全性和稳定性,需要对其运行进行控制。
2、现有的升降机主要通过根据货物的重量、输送距离等基本情况,再通过人员远程进行输送控制,很显然,这种控制方式还存在以下几个方面的问题:1、未考虑到升降机自身的安全性能,从而导致升降机的使用存在安全隐患,增加了货物运输的倾覆和坠落风险,使得货物运输的效率和稳定性得不到保障。
3、2、当前对升降机的停靠位置主要通过人员进行评判,进而进行粗略性的调控,未根据现场实际情况以及结合升降机的尺寸情况进行精细化分析,无法降低升降机升降过程中的碰撞概率,使得升降机的停靠点位置确认的精确性和可靠性不足,从而使得货物运输的效率得不到保障。
4、3、未结合货物放置状态、所处环境中的风况以及支持腿的固定情况进行综合型的速度控制,使得速度控制的可靠性和适配性还存在一定的欠缺,无法为升降机输送速度的确认提供更加稳固的支撑依据,从而无法保障货物运输的安全性和顺畅性。
5、4、当前适用于运输平面较为平整的情况,不适用于障碍输送平面,存在一定的场景局限性,适用性不强。
技术实现思路
1、鉴于此,为解决上述背景技术中所提出的问题,现提出一种数控升降设备控制方法及系统。
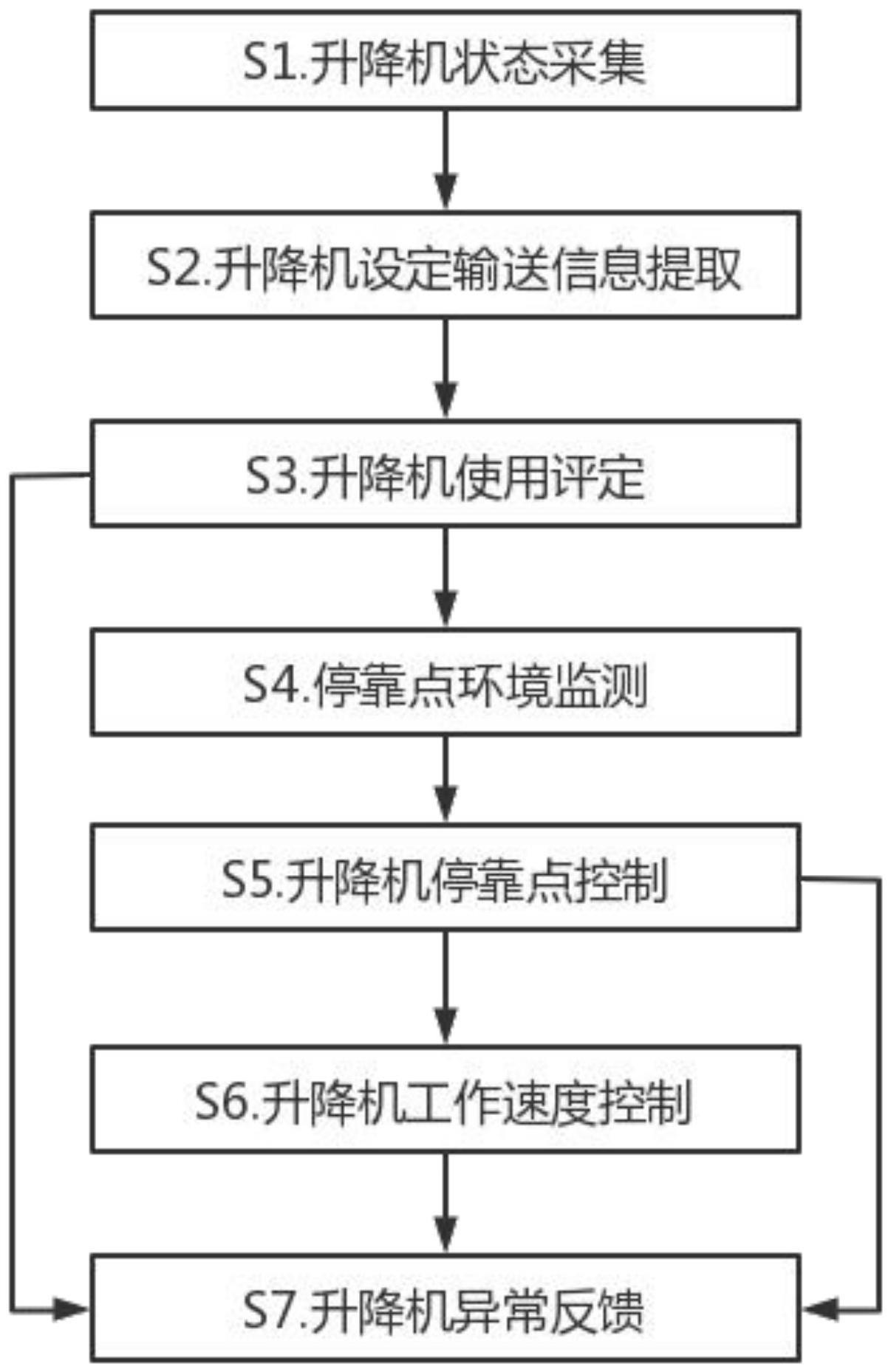
2、本发明的目的可以通过以下技术方案实现:本发明第一方面提供了一种数控升降设备控制方法,包括:s1、升降机状态采集:将当前待输送货物的移动剪叉式升降机记为目标升降机,并对目标升降机进行状态采集,进而得到目标升降机的各状态参数。
3、s2、升降机设定输送信息提取:提取目标升降机的长度、设定输送间距、设定输送高度、设定输送速度、当前待输送货物重量和当前待输送货物对接平台所在位置和长度。
4、s3、升降机使用评定:根据目标升降机的各状态参数,计算得到目标升降机的安全评估系数,当目标升降机的安全评估系数大于或等于设定值时,则评定目标升降机许可使用,执行s4,反之,启动s7。
5、s4、停靠点环境监测:对目标升降机当前待运输货物对应对接平台所在竖直平面进行图像采集,得到目标升降机各停靠参数。
6、s5、升降机停靠点控制:根据目标升降机各停靠参数,确认目标升降机的目标停靠点位置,进而对目标升降机进行停靠位置控制。
7、s6、升降机工作速度控制:对目标升降机的各速度相关影响数据进行采集,并确认目标升降机的目标输送速度,进而对目标升降机进行输送速度控制。
8、s7、升降机异常反馈:对目标升降机不可使用、目标停靠点位置和目标输送速度进行反馈。
9、作为进一步的方法,所述目标升降机的各状态参数包括各剪叉连杆的腐蚀处数目、各腐蚀处对应的腐蚀面积、腐蚀轮廓以及各剪叉连杆对应各螺栓的紧固高度和各连接处的承载压力。
10、作为进一步的方法,所述目标升降机的安全评估系数的具体计算过程为:a1、提取目标升降机的各状态参数,统计目标升降机对应的腐蚀度、形变度、紧固度和受力均衡度,并将其分别标记为β、τ、δ和ε。
11、a2、计算得到目标升降机的安全评估系数φ,
12、其中,β′、τ′、δ′和ε′分别表示设定许可的腐蚀度、形变度、紧固度和受力均衡度,a1、a2、a3和a4分别表示设定腐蚀度、形变度、紧固度和受力均衡度对应安全评估符合占比权重,γ1表示设定的安全评估符合修正因子。
13、作为进一步的方法,所述目标升降机各停靠参数包括目标升降机当前待输送货物对接平台所在位置下方的凸起障碍区域数目、凸起障碍区域类型、各凸起障碍区域与当前待输送货物对接平台之间的水平间距、重合面积和相对方位,其中,相对方位包括左侧和右侧,凸起障碍区域类型包括单侧型和交错型。
14、作为进一步的方法,所述确认目标升降机的目标停靠点位置,具体确认过程为:b1、提取当前待输送货物对接平台的中心点位置,将当前待输送货物对接平台的中心点位置映射至目标升降机所在平面,得到映射中心点位置,以映射中心点位置为基点,构建垂直于目标升降机待运输货物对应对接平台所在竖直平面的参照线,并将该参照线作为目标升降机的中心线。
15、b2、提取目标升降机的输送间距,基于目标升降机的中心线和输送间距,得到目标升降机的中心点位置,并作为目标升降机的初始停靠点位置。
16、b3、提取凸起障碍区域类型,若凸起障碍区域类型为单侧型,从所述各停靠参数中提取各凸起障碍区域与当前待输送货物对接平台之间的重合面积,若各凸起障碍区域与当前待输送货物对接平台之间的重合面积均为0,则进行单侧通行方式判断。
17、b4、若判断结果为直接通行,则将目标升降机的初始停靠点位置作为其目标停靠点位置。
18、b5、若判断结果为障碍通行,从目标升降机各停靠参数中提取各凸起障碍区域与当前待输送货物对接平台之间的相对方位和水平间距l间,并从目标升降机的设定输送信息中提取目标升降机的长度和当前待输送货物对接平台的长度,记为l机和l台。
19、b6、若凸起障碍区域位于当前待输送货物对接平台的左侧,则判定目标升降机的移动方式为右移,并将作为目标升降机中心点的右移距离,根据目标升降机的初始停靠点位置和右移距离,得到目标升降机的目标停靠点位置。
20、b7、若凸起障碍区域位于当前待输送货物对接平台的右侧,则判定目标升降机的移动方式为左移,则将作为目标升降机中心点的左移距离,根据目标升降机的初始停靠点位置和左移距离,得到目标升降机的目标停靠点位置。
21、b8、若各凸起障碍区域与当前待输送货物对接平台之间的重合面积存在不为0的凸起障碍区域,则按照障碍通行中目标升降机的目标停靠点位置的分析方式同理分析得到目标升降机目标停靠点位置。
22、b9、若凸起障碍区域类型为交错型,进行交错通行判断,并根据交错通行的判断结果分析目标升降机的目标停靠点位置。
23、作为进一步的方法,所述进行单侧通行方式判断,具体判断过程为:c1、若l机≤l台,则将直接通行作为单侧通行方式判断结果。
24、c2、从目标升降机各停靠参数中提取各凸起障碍区域与当前待输送货物对接平台之间的水平间距和相位方位,并从中提取出左侧最小水平间距和右测最小水平间距,记为l左和l右。
25、c3、若或则将直接通行作为单侧通行方式判断结果。
26、c4、若或则将障碍通行作为单侧通行方式判断结果。
27、作为进一步的方法,所述目标升降机的各速度影响数据包括升降工作台重量监测点对应的位置以及监测的重量值、目标升降机所处环境的风力和风向、目标升降机对应支持腿的支撑力和支撑区域的平整度。
28、作为进一步的方法,所述确认目标升降机的目标输送速度,具体确认过程为:d1、提取升降工作台各重量监测点对应的位置,并从中定位出升降工作台中心点位置的重量监测点,作为目标监测点,将目标监测点监测的重量值作为参照重量值。
29、d2、将其他各重量监测点作为各分析监测点,提取各分析监测点对应监测的重量值,并与参照重量值进行作差,得到各分析监测点对应的参照重量差。
30、d3、将各分析监测点对应的参照重量差进行均值计算,得到平均重量差,记为g0。
31、d4、从各分析监测点对应的参照重量差中提取出最大重量差和最小重量差,分别记为g大和g小。
32、d5、计算目标升降机对应货物分布层面的速度适配度的干扰评估权重因子θ,其中,δg表示设定参照的重量差偏差,γ2表示设定的货物分布层面的速度适配度干扰评估权重因子。
33、d6、分析目标升降机对应风力层面的速度适配度
34、d7、分析目标升降机对应支持腿抓取力层面的速度适配度
35、d8、从设定输送信息中提取目标升降机当前待输送货物重量和设定输送高度,分别记为w和h。
36、d9、计算目标升降机的输送速度适配度ζ,并由此计算目标升降机的目标输送速度v,其中,ζ′表示设定参照的输送速度适配度,v基表示设定输送速度,δv表示单位输送速度适配度差对应的参照输送速度。
37、作为进一步的方法,所述计算目标升降机的输送速度适配度的公式为:其中,w′和h′分别表示设定参照的待输送货物重量和设定输送高度,b1、b2、b3和b4分别表示设定的待输送货物重量、设定输送高度、风力层面和支持腿抓取力层面对应速度适配符合占比权重。
38、本发明第二方面提供了一种数控升降设备控制系统,包括:升降机状态采集模块,用于对目标升降机的各状态参数进行采集。
39、升降机设定输送信息提取模块,用于提取目标升降机的设定输送信息。
40、升降机使用评定模块,用于根据目标升降机的各状态参数,对目标升降机进行使用许可评定。
41、停靠点环境监测模块,用于对目标升降机的停靠点环境进行监测,得到目标升降机各停靠参数。
42、升降机停靠点控制模块,用于根据目标升降机各停靠参数,确认目标升降机的目标停靠点位置,进而对目标升降机进行停靠位置控制。
43、升降机工作速度控制模块,用于对目标升降机的各速度相关影响数据进行采集,并由此分析得到目标升降机的输送速度适配度,进而对目标升降机进行输送速度控制。
44、升降机异常反馈,用于对目标升降机不可使用、目标停靠点位置和目标输送速度进行反馈。
45、相较于现有技术,本发明的实施例至少具有如下优点或有益效果:(1)本发明通过对升降机的自身状态进行健康监测,并根据采集的当前待运输货物对应对接平台所在竖直平面的停靠情况、所述环境的风况以及支撑情况进行升降机的目标停靠位置和输送速度的自动化控制,有效解决了人员远程进行输送控制方式中存在的局限性,实现了升降机的针对性和灵活性控制,同时还减少了货物运输的倾覆和坠落风险,从而确保了升降机停靠点位置确认的精准性和输送速度的适配性。
46、(2)本发明通过结合升降机和当前待输送货物对接平台长度以及凸起障碍区域情况进行升降机停靠点位置控制,为升降机停靠点位置确认提供了更加稳固的支撑依据,同时提高了升降机停靠点位置确认的可靠性。
47、(3)本发明通过货物放置状态、所处环境中的风况以及支持腿的固定情况进行综合型的输送速度控制,提高了升降机输送速度控制的合理性,进而提高了升降机输送速度确认的可信度,同时显著提高了货物运输的安全性和顺畅性。
48、附图说明
49、为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
50、图1为本发明的方法步骤流程示意图。
51、图2为本发明的系统结构连接示意图。
52、图3为本发明单侧型不重合凸起障碍区域示意图。
53、图4为本发明单侧型重合凸起障碍区域示意图。
54、图5为本发明发交错型不重合凸起障碍区域示意图。
55、图6为本发明交错型重合凸起障碍区域示意图。
- 还没有人留言评论。精彩留言会获得点赞!