一种航空发动机装配辅助设备的制作方法
本技术涉及航空发动机的,尤其是涉及一种航空发动机装配辅助设备。
背景技术:
1、航空发动机是一种高度复杂和精密的热力机械,作为飞机的心脏,不仅是飞机飞行的动力,也是促进航空事业发展的重要推动力,人类航空史上的每一次重要变革都与航空发动机的技术进步密不可分。
2、目前,航空发动机在进行组装时,由于其体积较大,且重量较重,一般需要通过吊装设备将零件吊起,然后移动到待组装的位置,再进行组装。现有的吊装设备一般将收线机构安装在天车上,且收线机构的下方设置有挂钩对零件进行连接,天车在轨道上移动,带动零件进行移动,收线机构带动挂钩和零件上下移动,完成吊装。
3、在航空发动机的吊装过程之中,垂直装配是至将航空发动机在其轴线与水平面垂直的状态下进行安装的过程。垂直装配是航空发动机的典型装配方式,垂直装配具有易于对中、工艺简单等特点。航空发动机垂直装配完成后需翻转至水平状态,以便于运输和进行台架试验。
4、针对上述中的相关技术,采用吊装的方式实现航空发动机的组装过程之中,由于吊装多采用钢索,所以在航空发动机的零件相互对准的过程之中,零件容易出现晃动的情况,而导致定位不准。
技术实现思路
1、本技术提供一种航空发动机装配辅助设备,其目的是降低航空发动机在相互定位安装的过程之中的晃动幅度,增加安装和定位的准确性。
2、本技术提供的一种航空发动机装配辅助设备采用如下的技术方案:
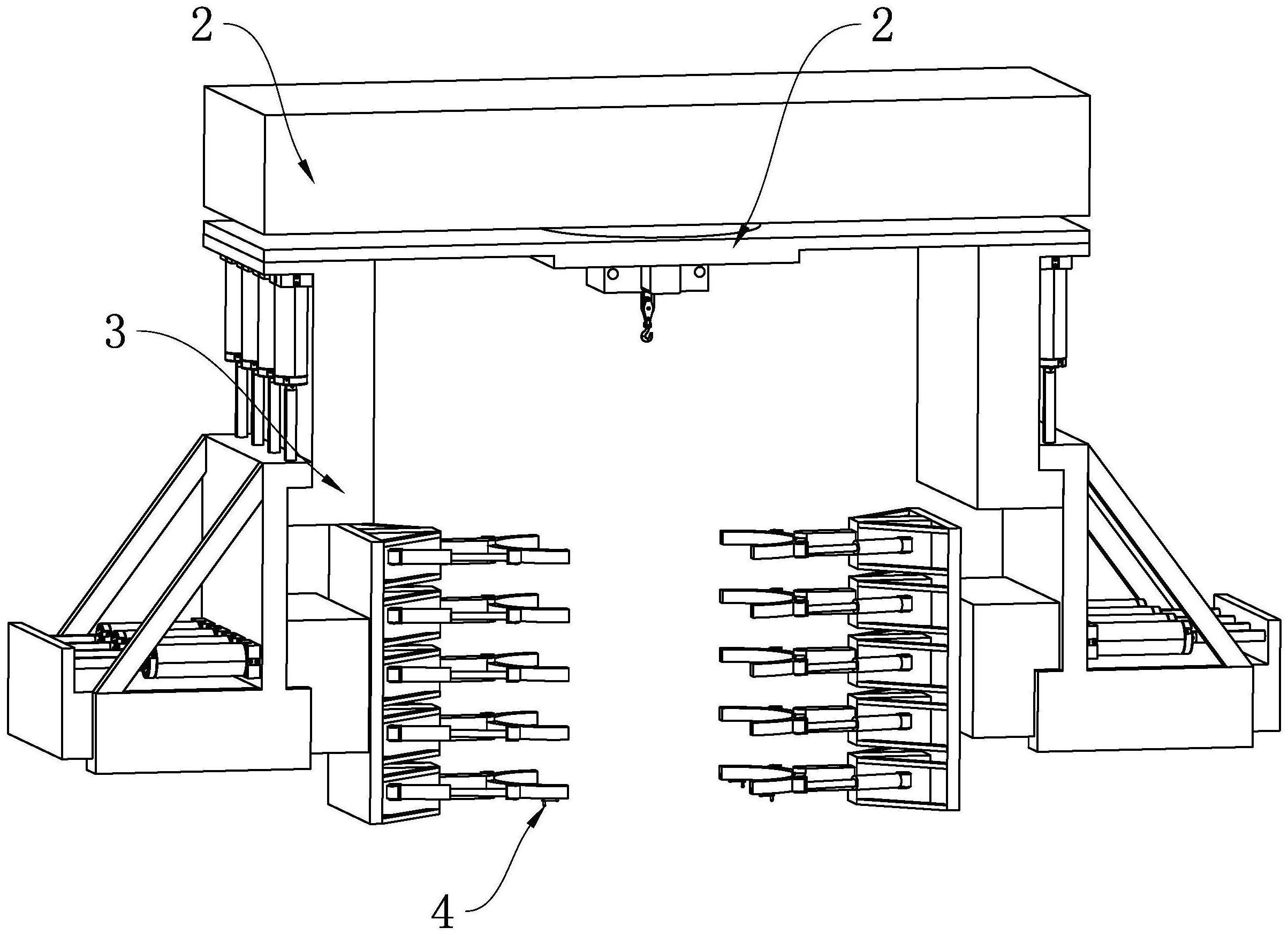
3、一种航空发动机装配辅助设备,包括安装座,所述安装座上设置有吊钩机构,所述吊钩机构相对两侧均设置有辅助稳定机构;所述辅助稳定机构包括伸长臂、推动臂和夹爪,所述伸长臂沿竖直方向设置,所述推动臂设置在所述伸长臂下端且所述推动臂沿水平方向设置,所述夹爪设置在所述推动臂朝向所述吊钩机构的一端,所述推动臂包括能够推动所述夹爪沿水平方向运动的推动驱动件。
4、通过采用上述技术方案,本技术中安装座的设置,一方面用于与工厂内的行车相互连接,另一方面也为吊钩机构以及辅助夹持机构提供了安装的主体。而安装座下方的吊钩机构的设置,能够实现航空发动机中各个零件的起吊工作;吊钩机构两侧均设置一个辅助夹持机构,辅助夹持机构通过伸长臂的设置,将夹爪设置在吊钩机构的下侧,并且在伸长臂与夹爪之间设置推动臂,而推动臂包括推动驱动件,因此在推动驱动件的作用下,夹爪能够沿水平方向朝吊钩机构的方向运动。
5、从而通过两个辅助夹持架构的配合,在吊钩机构将航空发动机的零件吊起后,两个夹爪沿水平方向设置在零件的两侧,因此能够在水平方向对零件进行定位,降低吊起后的零件的晃动情况。
6、可选的,所述吊钩机构包括安装板,所述安装板设置在所述安装座下侧,所述安装板与所述安装座之间设置有能够驱动所述安装板旋转的微转平台。
7、通过采用上述技术方案,吊钩机构中安装板的设置用于安装吊钩机构的其他零件,而安装板与安装座之间设置微调平台,从而微调平台驱动安装板旋转,使得在吊钩机构吊起零件之后,通过微调平台的旋转能够驱动零件旋转,便于安装过程之中零件与零件的安装孔的对齐。
8、可选的,还包括定位反馈机构,所述定位反馈机构包括激光传感器和调节连杆,所述调节连杆与所述夹爪滑动连接,所述激光传感器与所述调节连杆相互连接,所述激光传感器沿竖直方向设置且所述激光传感器的检测部竖直朝下设置。
9、通过采用上述技术方案,定位反馈机构中激光传感器沿竖直方向设置,且激光传感器的检测部竖直朝下设置,从而当夹爪夹持零件之后,通过调节连接杆在夹爪上滑动,使得激光传感器的检测部能够沿竖直方向对准零件上的安装孔,因此激光传感器能够检测到在吊装零件安装的过程之中,零件与零件的安装孔是否对齐,从而能够反馈信息给微转平台,使得微转平台能够驱动零件与零件的安装孔对齐。
10、可选的,所述调节连杆包括滑动块、连接柱以及旋转杆,所述连接柱轴向沿竖直方向设置,所述连接柱上端与所述滑动块相互连接,所述夹爪上开设有滑动环槽,所述滑动块与所述滑动环槽插接配合且所述滑动块与所述滑动环槽内壁滑动连接;
11、所述连接柱下端与所述旋转杆转动连接,所述激光传感器设置在所述旋转杆远离所述连接柱的一端。
12、通过采用上述技术方案,调节连杆中,通过滑动块与滑动环槽的配合,使得滑动块能够在夹爪上滑动,而连接柱与旋转杆的设置,使得旋转杆能够以连接柱为中轴线进行转动。由于激光传感器设置在旋转杆上,从而通过旋转、连接柱以及滑动块的设置,使得激光传感器能够进行多方向的调节,便于激光传感器对准吊起的零件上的安装孔。
13、可选的,所述夹爪沿竖直方向间隔设置有若干个,所述夹爪包括夹持环与延伸臂,所述延伸臂长度方向沿所述推动臂长度方向设置,且所述延伸臂两端分别与所述夹持环以及所述推动臂相互连接,若干所述夹持环同轴设置且轴向沿竖直方向设置。
14、通过采用上述技术方案,夹爪沿竖直方向设置若干个,使得在吊起零件之后,若干个夹爪分别夹住零件的不同位置,能够有效地防止零件在夹持过程中出现滑移或旋转,从而能够提高零件的夹持稳定性。而延伸臂的设置用于固定夹持环,夹持环的设置便于夹持航空发动机内的圆柱体零件。
15、可选的,所述延伸臂包括支撑臂与滑动臂,所述支撑臂沿自身长度方向与所述滑动臂滑动连接,所述支撑臂与所述滑动臂之间设置有抵紧弹簧,所述抵紧弹簧轴向沿所述支撑臂的长度方向且所述抵紧弹簧两端分别与所述支撑臂以及所述滑动臂相互连接。
16、通过采用上述技术方案,延伸臂包括支撑臂与滑动臂,且滑动臂与支撑臂滑动连接,并且在滑动臂与支撑臂之间设置抵紧弹簧,因此,在夹爪夹持零件时,通过抵紧弹簧的作用,使得夹持环能够与零件抵紧,增加夹持的稳定性。同时,若干个夹爪这样的设置,在夹持的零件沿自身轴向呈阶梯分布时,通过滑动臂与支撑臂之间的滑动,使得对应的夹爪能够适应零件不同位置的直径尺寸,并在承受夹紧力的同时提供足够的支撑。
17、可选的,所述夹持环包括第一环与第二环,所述第一环与第二环沿水平方向设置在所述延伸臂两侧,所述第一环与所述第二环相互靠近的一端均与所述延伸臂转动连接。
18、通过采用上述技术方案,夹持环包括第一环与第二环,而第一环与第二环均与延伸臂相互连接,从而在夹持零件的直径过大时,通过第一环与第二环的转动,从而使得零件能够进入到夹持环内,实现对零件的夹持。
19、可选的,所述第一环与所述延伸臂之间设置有第一抵紧弹性件,所述第一抵紧弹性件两端分别与所述第一环以及所述延伸臂转动连接;所述第二环与所述延伸臂之间设置有第二抵紧弹性件,所述第二抵紧弹性件两端分别与所述第二环以及所述延伸臂转动连接。
20、通过采用上述技术方案,第一抵触弹性件的设置,通过第一抵触弹性件的弹性形变能够限位第一环的转动,在零件进入到夹持环内时,第一环在第一抵触弹性件的作用下能够与零件侧壁抵紧,从而增加夹持零件的稳定性,同时第一抵触弹性件的设置,也能换实现第一环转动后的自动复位。第二抵触弹性件的作用同第一抵触弹性件的作用相同。
21、可选的,所述伸长臂包括第一臂与第二臂,所述第一臂与所述第二臂沿竖直方向滑动连接,所述第一臂上端与所述安装座相互连接,所述第二臂下端与所述推动臂相互连接,所述第一臂与所述第二臂之间设置有能够驱动所述第二臂沿竖直方向运动的升降驱动件。
22、通过采用上述技术方案,伸长臂包括第一臂、第二臂以及设置在第一臂与第二臂之间的伸降驱动件,并且第一臂与第二臂沿竖直方向滑动连接,从而通过升降驱动件的设置能够实现第二臂沿竖直方向的运动,从而能够改变夹爪的位置,以此适应不同的零件的吊装。
23、可选的,所述第一臂与所述第二臂之间设置有防坠组件,所述防坠组件包括第一限位板与第二限位板,所述第一限位板设置在所述第一臂朝向所述第二臂的一侧,所述第二限位板设置在所述第二臂朝向所述第一臂的一侧,所述第一限位板沿竖直方向设置在所述第二限位板正下方。
24、通过采用上述技术方案,防坠组件中第一限位板与第二限位板沿竖直方向正对的设置,一方面,在第一臂与第二臂沿竖直方向滑动时,第一限位板与第二限位板对第一臂与第二臂之间的滑动距离进行限位;另一方面,在第二臂坠落时,第一限位板与第二限位板能够相处支撑,防止第二臂直接坠落。
25、综上所述,本技术包括以下至少一种有益技术效果:
26、1.本技术在吊钩机构的两侧设置辅助夹持机构,通过夹爪对吊钩机构吊起的零件进行水平方向的加固,能够降低吊起的零件在安装过程之中的晃动情况。
27、2.通过微转平台与反馈定位机构的配合,能够实现吊起的零件的安装过程之中的自动旋转与定位。
28、3.通过延伸臂以及夹持环的结构设置,使得辅助夹持机构能够夹持多种直径尺寸的圆柱形零件以及外侧壁面呈阶梯状的圆柱形零件。
- 还没有人留言评论。精彩留言会获得点赞!