轨道板多点协同智能顶升设备及方法与流程
本发明涉及,尤其涉及一种轨道板多点协同智能顶升设备及方法。
背景技术:
1、预制轨道板是一种在铁路建设中广泛使用的预制混凝土元件,随着城市化进程的加快,城市轨道交通建设的需求日益增加,预制轨道板的应用市场也在不断扩大。加上国家对于城市轨道交通建设给予了大力支持,相关政策的出台也促进了预制轨道板的应用。如今,预制轨道板因其高施工效率、高平整性、高稳定性等特点,已在高铁线路、地铁线路、市区轨道交通线路中扮演着重要的角色。
2、预制轨道板在轨道交通工程项目中应用日益增多,随之而来也有一些问题产生。预制轨道板施工后,因下部基础不均匀或不稳定、环境变化、施工质量等问题,日积月累,预制轨道板可能会有产生下沉,影响行车安全和乘客舒适性,此时就需要对下沉轨道板做维修复位。对此,目前普遍做法是根据施工场地条件,在天窗时间段选择使用吊车、起重机、人工液压千斤顶等方法进行修复,但现有方法因设备笨重、效率较低、误差大等原因,无法保证在有限的天窗时间内快速、准确完成预制轨道板的修复、就位工作。
3、为此,本发明的设计者有鉴于上述缺陷,通过潜心研究和设计,综合长期多年从事相关产业的经验和成果,研究设计出一种轨道板多点协同智能顶升设备及方法,以克服上述缺陷。
技术实现思路
1、本发明的目的在于提供一种轨道板多点协同智能顶升设备及方法,体积小、效率高、智能协同、操作简单等优点,可以利用少量的人工在天窗时间内高效、高精度地完成轨道板顶升工作。
2、为实现上述目的,本发明公开了一种轨道板多点协同智能顶升方法,其特征在于包含如下步骤:
3、步骤一:准备步骤,即将顶升设备运送到目的位置,把四个顶升千斤顶分别摆放在轨道板的内侧四个角部;
4、步骤二:顶升设备主机开始工作,输入四个顶升千斤顶的目标顶升高度ln,开始进行顶升过程;
5、步骤三:在顶升千斤顶启动时采集各路千斤顶油压值p0n,以在后续顶升过程中实时监测各路千斤顶油压值p1n;
6、步骤四:顶升过程中实时计算每个顶升千斤顶的受力值f△n,当顶升千斤顶顶升到一定高度接触到轨道板下表面时,各路顶升千斤顶会因顶升受阻而导致受力值f△n增大,故设定一个受力临界阈值f临界,当某一个顶升千斤顶受力值达到受力临界阈值后,判定对应的顶升千斤顶完成就位工作,停止该千斤顶的顶升动作;
7、步骤五:分别针对每个顶升千斤顶重复步骤四直至所有顶升千斤顶都已完成就位阶段并停止顶升,完成整体就位;
8、步骤六:开始实际抬升,记录此时四个顶升千斤顶对应的千斤顶位移传感器测量值l0n,以此为起点开始实际的顶升过程,此时四路顶升千斤顶的初始运行速度为v0n;
9、步骤七:在顶升过程中实时监测各个千斤顶位移传感器的测量值l1n,并同步计算四个千斤顶对应点位的实际顶升量l△n升,实际顶升量计算方法为l△n升=l1n-l0n;结合各路顶升千斤顶的目标顶升高度ln,计算各路顶升千斤顶3的顶升进度pern升为根据四路顶升千斤顶的顶升进度pern升判断是否发生因千斤顶顶升不协同导致轨道板倾斜,如发生倾斜,跳到步骤八,未倾斜,跳到步骤九;
10、步骤八:轨道板发生倾斜后,通过调整对应顶升千斤顶的运行速度来纠正倾斜;
11、步骤九:为提高顶升高度的控制精度以及顶升平稳性,在顶升高度接近目标顶升高度时,将各路顶升千斤顶的速度整体降低,直至平稳到达目标顶升高度;
12、步骤十:根据各路顶升千斤顶的顶升进度pern升判别是否有千斤顶已达到目标顶升高度,如果pern升≥1,千斤顶已达到目标顶升高度,停止对应顶升千斤顶的顶升动作,如果pern升<1,千斤顶尚未达到目标顶升高度,继续顶升;
13、步骤十一:判断是否所有千斤顶都已达到目标顶升高度;
14、如果是,完成目标轨道板的顶升工作;
15、如果否,跳转到步骤七,继续执行智能顶升工作;
16、步骤十二:在轨道板顶升完成后开始进行轨道板修复工作;
17、步骤十三:完成目标轨道板的修复工作后,进行回落过程;
18、步骤十四:以轨道板当前的高度为起始点,以ln为轨道板目标回落的距离,实现轨道板按照顶升轨迹回落;
19、步骤十五:在轨道板回落过程中,实时监测各个千斤顶位移传感器的测量值l1n,并同步计算四个千斤顶对应点位的实际回落量l△n落,实际回落量为l△n落=l0n+ln-l1n;
20、结合各路顶升千斤顶的目标回落高度ln,计算各路顶升千斤顶的回落进度pern落为
21、根据四路顶升千斤顶的顶升进度pern落判断是否发生因千斤顶回落不协同导致轨道板倾斜,如果发生倾斜,跳到步骤十六,未倾斜,跳到步骤十七;
22、步骤十六:轨道板发生倾斜后,需要通过调整对应顶升千斤顶的运行速度来纠正倾斜;
23、步骤十七:在轨道板回落过程中,实时计算每个顶升千斤顶的受力值f△n,当顶升千斤顶回落至轨道板下表面接触到修复后的轨道板槽上表面时,顶升千斤顶会因此导致受力值f△n突然减小,取步骤四中的受力临界阈值f临界,当某一个顶升千斤顶受力降至受力临界阈值后,判定对应顶升千斤顶完成回落工作,停止该千斤顶的回落动作;
24、步骤十八:判断是否所有千斤顶都已停止回落,如果是,完成目标轨道板的回落,如果否,跳转到步骤十五,继续回落过程;
25、步骤十九:完成轨道板的回落后设置所有顶升千斤顶以最大速度回落,完成千斤顶复位。
26、其中:步骤四中顶升千斤顶的受力值通过千斤顶油缸内液压油接触面和千斤顶对应油压值计算,千斤顶油缸内液压油接触面属于千斤顶生产尺寸,是已知值,已知接触面直径为d,结合实时监测到各路千斤顶油压值p1n,四路千斤顶对应p11,p12,p13,p14,计算千斤顶实时受力变化为
27、(1)如果f△n≥f临界,停止对应千斤顶的顶升;
28、(2)否则,继续顶升。
29、其中:步骤七中倾斜判断方法如下:
30、将四路顶升千斤顶的顶升进度per1升,per2升,per3升,per4升按照大小排序,得出最快进度permax升和最慢进度permin升,得出四个顶升千斤顶之间的最大进度差为per△max升=permax升-permin升;
31、设定一最大进度差阈值per△临界:
32、(1)如果per△max升≥per△临界,判定轨道板发生倾斜,跳到步骤八;
33、(2)否则,未倾斜,跳到步骤九。
34、其中:步骤八中根据四路顶升千斤顶的实时顶升进度pern升计算出平均进度per平均为然后计算每一路千斤顶顶升进度与平均进度之间的差值per△n升为per△n升=pern升-per平均,由此,计算出顶升千斤顶3对应调整后的速度v1n为v1n=v旧n+per△n升*eps;
35、其中:v旧n为对应千斤顶调整前的速度,第一次调整速度时v旧n等于初始运行速度v0n,eps为速度调整计算系数。
36、其中:步骤九中按照千斤顶的顶升进度,设定降速阈值per降,在顶升过程中,实时比对各路顶升千斤顶3的顶升进度,当顶升进度pern升≥per降时,进入降速流程;否则,跳转到步骤七;
37、其中:per降为降速阈值,为固定值,顶升进度超过此值的顶升千斤顶启动降速流程;
38、对于进入降速流程中的顶升千斤顶3,将其运行速度v1n调整为v1n降为v1n降=v1n*eps降;
39、其中:eps降为降速系数,为固定值,具体取值根据使用者对运行速度的等级选择而定,分为快速、中速、慢速三档位,每个档位对应不同的降速系数。
40、其中:步骤十五中倾斜的判断方法如下:
41、将四路顶升千斤顶的回落进度per1落,per2落,per3落,per4落按照大小排序,得出最快进度permax落和最慢进度permin落,得出四个顶升千斤顶之间的最大进度差为per△max落=permax落-permin落,取最大进度差阈值per△临界;
42、(1)如果per△max落≥per△临界,轨道板发生倾斜,跳到步骤十六;
43、(2)否则,未倾斜,跳到步骤十七。
44、其中:步骤十六中根据四路顶升千斤顶3的实时顶升进度pern落计算出平均进度per平均:
45、
46、然后计算每一路千斤顶顶升进度与平均进度之间的差值per△n落:
47、per△n落=pern落-per平均
48、由此,计算出顶升千斤顶3对应调整后的速度v1n为:
49、v1n=v旧n+per△n落*eps
50、其中:eps为速度调整计算系数。
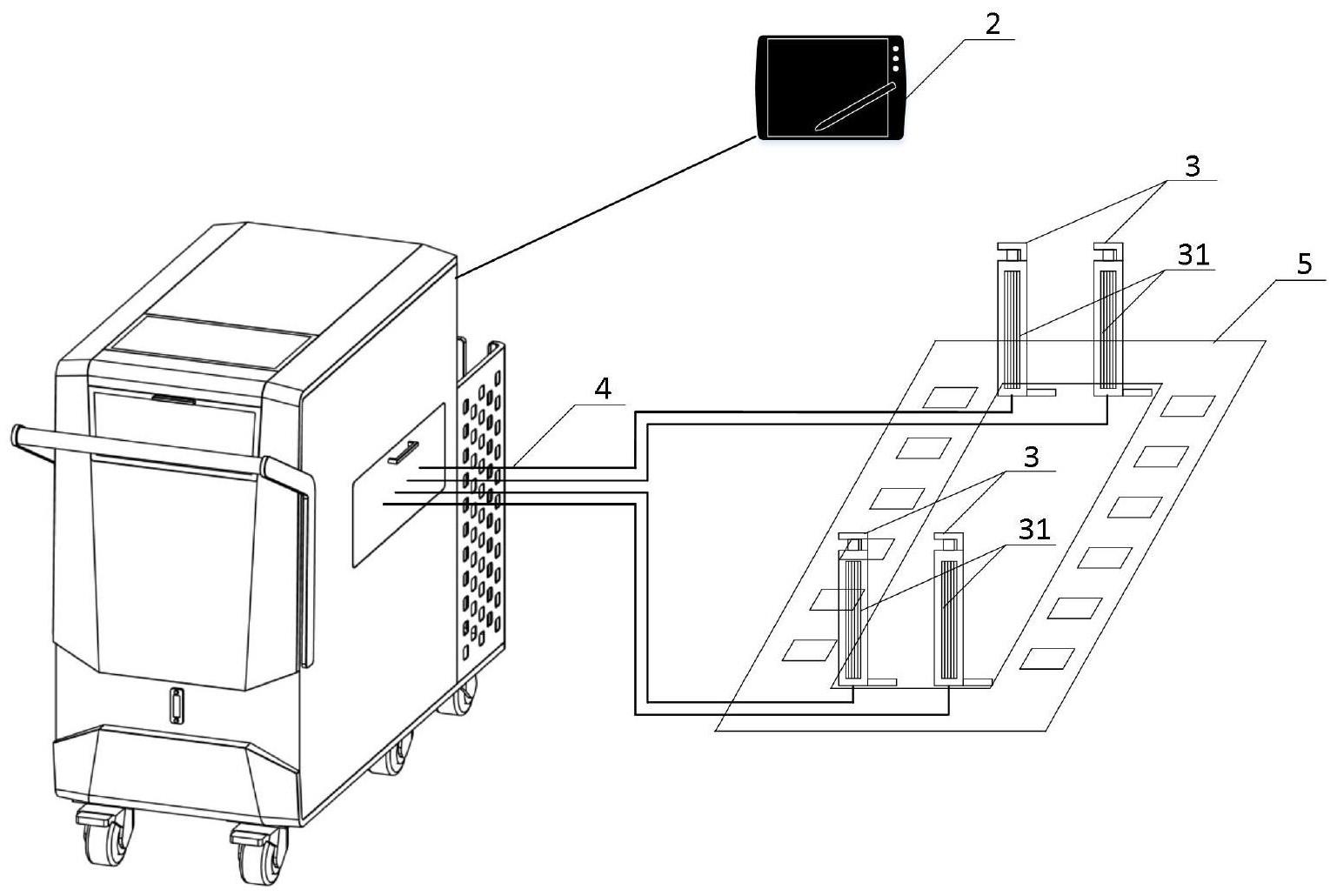
51、还公开了一种轨道板多点协同智能顶升方法的顶升设备,包括顶升设备主机、测控平板和顶升千斤顶,所述顶升设备主机和测控平板之间通过无线通信连接,所述顶升设备主机通过千斤顶油管连接至顶升千斤顶,其特征在于:
52、所述顶升设备主机的前端设置有千斤顶放置区以将顶升千斤顶收纳其中进行移动,所述顶升设备主机的后部可设有推手,其底部设有多个万向轮。
53、其中:所述顶升千斤顶包含千斤顶位移传感器、千斤顶顶升脚、千斤顶顶升头和千斤顶顶升柱,所述千斤顶顶升脚和千斤顶顶升头为一体设置,与一根竖向钢结构组成形的结构,所述千斤顶顶升柱的顶端与千斤顶顶升头之间采用螺杆连接。
54、通过上述内容可知,本发明的轨道板多点协同智能顶升设备及方法具有如下效果:
55、1、体积小、效率高、智能协同、操作简单等优点,可以利用少量的人工在天窗时间内高效、高精度地完成轨道板顶升工作。
56、2、具有吊车、起重机设备顶升轨道板的同步性、智能性、精准性和人工液压千斤顶顶升的轻便性、通用性等优点,可以适应目前轨道板铺设地形环境下的施工。设备配备智能测控系统,一键启动、自动停止,利用更少的人力投入,精准、便捷的完成轨道板顶升操作。
57、本发明的详细内容可通过后述的说明及所附图而得到。
58、附图说明
59、图1显示了本发明的轨道板多点协同智能顶升设备的侧前方示意图。
60、图2显示了本发明的轨道板多点协同智能顶升设备的侧后方示意图。
61、图3显示了本发明的轨道板多点协同智能顶升设备的工作原理图。
62、图4显示了本发明的千斤顶与轨道板结构关系剖面图。
63、图5显示了本发明的千斤顶与轨道板结构关系俯视图。
64、图6显示了本发明的轨道板多点协同智能顶升设备的隧道中轨道板顶升前的剖面图。
65、图7显示了本发明的多点协同智能顶升流程图。
66、图8显示了本发明的多点协同智能复位流程。
- 还没有人留言评论。精彩留言会获得点赞!