基于视觉的皮带跑偏检测方法、系统、设备及存储介质与流程
本发明属于图像识别处理的,具体地涉及一种基于视觉的皮带跑偏检测方法、系统、电子设备及存储介质。
背景技术:
1、货物运输传送带输送机广泛应用在装运港口、加工厂等短距离运输场景,其具有的结构简单、输送量大、使用场景广泛等优点,使得可以运用在各行各业中。但是,在运送过程中,货物运输传送带会由于安装位置偏差,物料超重、偏移等问题导致其位置发生偏移,长时间的跑偏更可能会使传送带发生断裂,严重影响传送带的使用寿命,而且一旦出现问题也波及整个生产过程。如何准确地对带式输送机皮带跑偏进行识别显得至关重要。
2、目前,皮带跑偏识别方法主要包括基于人工经验的识别方法和基于计算机视觉、传感器技术和深度学习等方法。基于人工经验的皮带跑偏识别方法需要对皮带跑偏情况进行人工判断,容易受到人工因素的影响。基于计算机视觉的皮带跑偏识别方法,容易受到图像噪声(检测皮带的摄像头上积累的大量灰尘)的影响,且现场环境复杂给皮带跑偏的边缘识别带来困难。基于深度学习的端到端皮带跑偏识别方法需要大量的数据支持,包括正常图片与跑偏图片支持来进行训练和优化,而这往往需要大量的时间和资源,导致检测的实时性较差且检测成本高昂。
3、因此,如何实现皮带跑偏检测技术的高精度、简易性及实时性,对于本领域技术人员来说显得尤为重要。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种基于视觉的皮带跑偏检测方法、系统、电子设备及存储介质,可以实现皮带跑偏检测技术的高精度、简易性及实时性。
2、第一方面,本技术提供了一种基于视觉的皮带跑偏检测方法,其包括:
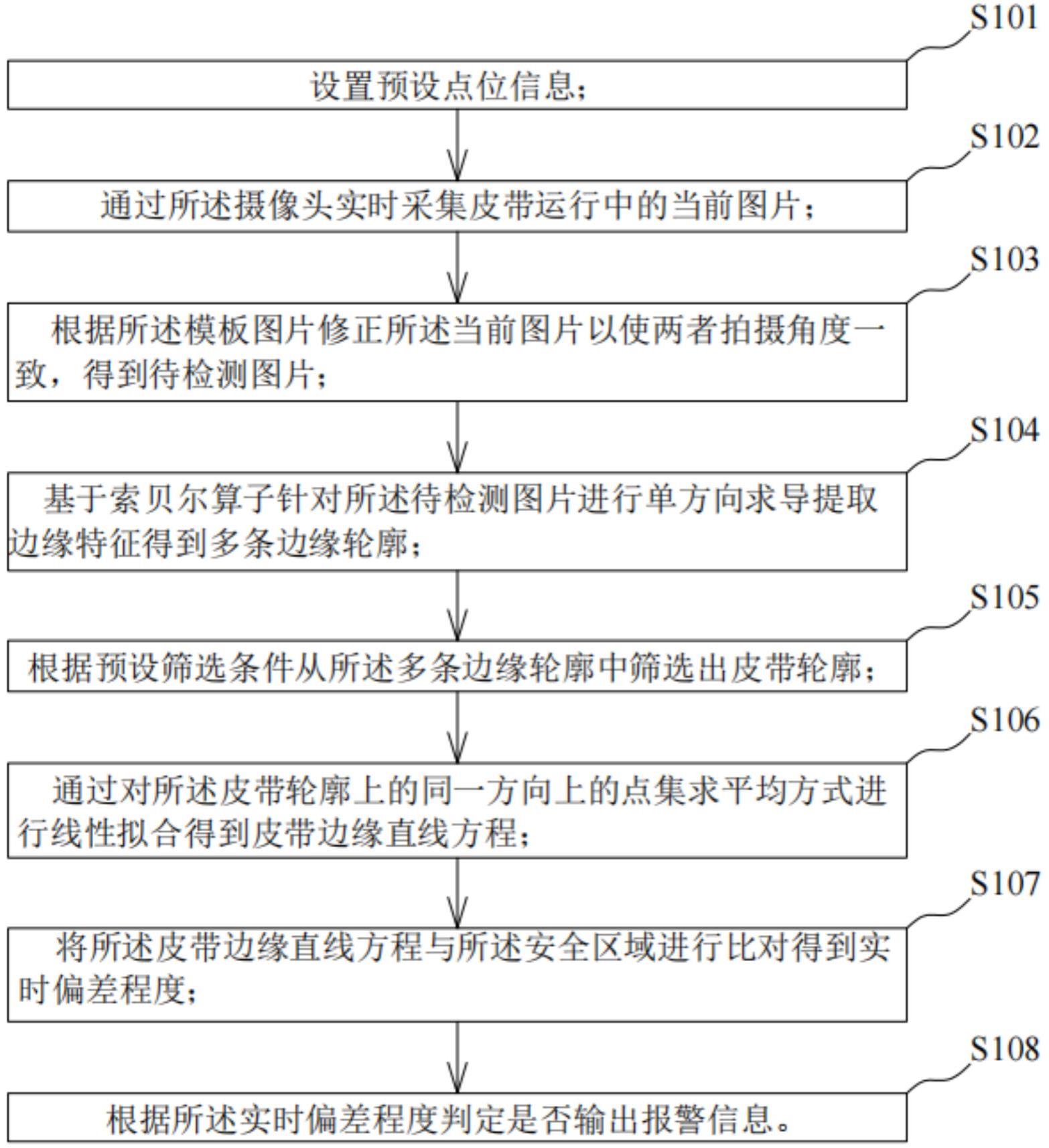
3、设置预设点位信息,其中,所述预设点位信息包括经摄像头采集的模板图片以及在所述模板图片上预划分的皮带矩形框及安全区域;
4、通过所述摄像头实时采集皮带运行中的当前图片;
5、根据所述模板图片修正所述当前图片以使两者拍摄角度一致,得到待检测图片;
6、基于索贝尔算子针对所述待检测图片进行单方向求导提取边缘特征得到多条边缘轮廓;
7、根据预设筛选条件从所述多条边缘轮廓中筛选出皮带轮廓;
8、通过对所述皮带轮廓上的同一方向上的点集求平均方式进行线性拟合得到皮带边缘直线方程;
9、将所述皮带边缘直线方程与所述安全区域进行比对得到实时偏差程度;
10、根据所述实时偏差程度判定是否输出报警信息,其中,所述报警信息包括皮带发生跑偏报警指令及其对应的实时皮带偏移量。
11、优选地,所述设置预设点位信息的步骤具体包括:
12、通过摄像头获取皮带预设点位的模板图片;
13、在所述模板图片内划定含有部分皮带的皮带矩形框;
14、基于所述皮带矩形框内的部分皮带方向在所述皮带矩形框内选定安全区域。
15、优选地,所述根据所述模板图片修正所述当前图片以使两者拍摄角度一致,得到待检测图片的步骤具体包括:
16、将所述当前图片与所述模板图片进行特征匹配得到视角偏移及旋转角度;
17、根据所述视角偏移及旋转角度计算变换矩阵;
18、基于所述变换矩阵修正所述当前图片以使所述当前图片与所述模板图片的拍摄角度一致,得到待检测图片。
19、优选地,所述基于所述索贝尔算子针对所述待检测图片进行单方向求导提取边缘得到多条边缘轮廓的步骤具体包括:
20、将所述待检测图片灰度化处理;
21、采用包含横向矩阵及纵向矩阵的索贝尔算子与灰度化处理的所述待检测图片的图像像素进行平面卷积,以及根据所述图像像素的上下、左右邻点灰度加权差,得到所述图像像素的横向及纵向灰度值;
22、将所述横向及纵向灰度值采用平方根算法得到所述图像像素的梯度值;
23、将所述梯度值大于预设阈值所对应的图像像素定义为边缘点;
24、根据所述边缘点采用线性逻辑得到多条边缘轮廓。
25、优选地,所述根据预设筛选条件从所述多条边缘轮廓中筛选出皮带轮廓的步骤具体包括:
26、基于所述皮带矩形框的大小设定筛选皮带轮廓的预设筛选条件;
27、求解所述多条边缘轮廓中的每一边缘轮廓的最小外接矩形;
28、将所述最小外接矩形与所述预设筛选条件进行对比,以使从所述多条边缘轮廓中筛选出皮带轮廓。
29、优选地,所述通过对所述皮带轮廓上的同一方向上的点集求平均方式进行线性拟合得到皮带边缘直线方程的步骤具体包括:
30、选取皮带轮廓线条的中点坐标;
31、将所述中点坐标按照y轴方向进行排序;
32、基于同一x坐标值下,解算不同y坐标值下所述皮带轮廓线条的平均值;
33、基于所述平均值拟合得到皮带边缘直线方程。
34、优选地,所述将所述皮带边缘直线方程与所述安全区域进行比对得到实时偏差程度的步骤具体包括:
35、将所述安全区域的区域边缘与所述皮带边缘直线方程进行差值运算得到若干差值;
36、将所述若干差值进行均值算法处理得到所述待检测图片的实时偏差程度。
37、第二方面,本技术提供了一种基于视觉的皮带跑偏检测系统,包括:
38、设置模块,用于设置预设点位信息,其中,所述预设点位信息包括经摄像头采集的模板图片以及在所述模板图片上预划分的皮带矩形框及安全区域;
39、采集模块,用于通过所述摄像头实时采集皮带运行中的当前图片;
40、修正模块,用于根据所述模板图片修正所述当前图片以使两者拍摄角度一致,得到待检测图片;
41、提取模块,用于基于索贝尔算子针对所述待检测图片进行单方向求导提取边缘得到多条边缘轮廓;
42、筛选模块,用于根据预设筛选条件从所述多条边缘轮廓中筛选出皮带轮廓;
43、拟合模块,用于通过对所述皮带轮廓上的同一方向上的点集求平均方式进行线性拟合得到皮带边缘直线方程;
44、比对模块,用于将所述皮带边缘直线方程与所述安全区域进行比对得到实时偏差程度;
45、报警模块,用于根据所述实时偏差程度判定是否输出报警信息,其中,所述报警信息包括皮带发生跑偏报警指令及其对应的实时皮带偏移量。
46、优选地,所述设置模块具体包括:
47、获取单元,用于通过摄像头获取皮带预设点位的模板图片;
48、划定单元,用于在所述模板图片内划定含有部分皮带的皮带矩形框;
49、选定单元,用于基于所述皮带矩形框内的部分皮带方向在所述皮带矩形框内选定安全区域。
50、优选地,所述修正模块具体包括:
51、匹配单元,用于将所述当前图片与所述模板图片进行特征匹配得到视角偏移及旋转角度;
52、计算单元,用于根据所述视角偏移及旋转角度计算变换矩阵;
53、修正单元,用于基于所述变换矩阵修正所述当前图片以使所述当前图片与所述模板图片的拍摄角度一致,得到待检测图片。
54、优选地,所述提取模块具体包括:
55、灰度单元,用于将所述待检测图片灰度化处理;
56、卷积单元,用于采用包含横向矩阵及纵向矩阵的索贝尔算子与灰度化处理的所述待检测图片的图像像素进行平面卷积,以及根据所述图像像素的上下、左右邻点灰度加权差,得到所述图像像素的横向及纵向灰度值;
57、方根单元,用于将所述横向及纵向灰度值采用平方根算法得到所述图像像素的梯度值;
58、定义单元,用于将所述梯度值大于预设阈值所对应的图像像素定义为边缘点;
59、逻辑单元,用于根据所述边缘点采用线性逻辑得到多条边缘轮廓。
60、优选地,所述筛选模块具体包括:
61、设定单元,用于基于所述皮带矩形框的大小设定筛选皮带轮廓的预设筛选条件;
62、求解单元,用于求解所述多条边缘轮廓中的每一边缘轮廓的最小外接矩形;
63、筛选单元,用于将所述最小外接矩形与所述预设筛选条件进行对比,以使从所述多条边缘轮廓中筛选出皮带轮廓。
64、优选地,所述拟合模块具体包括:
65、选取单元,用于选取皮带轮廓线条的中点坐标;
66、排序单元,用于将所述中点坐标按照y轴方向进行排序;
67、解算单元,用于基于同一x坐标值下,解算不同y坐标值下所述皮带轮廓线条的平均值;
68、拟合单元,用于基于所述平均值拟合得到皮带边缘直线方程。
69、优选地,所述比对模块具体包括:
70、差值单元,用于将所述安全区域的区域边缘与所述皮带边缘直线方程进行差值运算得到若干差值;
71、均值单元,用于将所述若干差值进行均值算法处理得到所述待检测图片的实时偏差程度。
72、第三方面,本技术提供了一种电子设备,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面所述的基于视觉的皮带跑偏检测方法。
73、第四方面,本技术提供了一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面所述的基于视觉的皮带跑偏检测方法。
74、相比于现有技术,本技术提供的一种基于视觉的皮带跑偏检测方法、系统、电子设备及存储介质,具有以下有益效果:
75、本发明结合预设点位信息,运用包含横向矩阵及纵向矩阵的索贝尔算子进行边缘检测,并且对轮廓进行直线拟合,对皮带运动的跑偏通过视频进行检测。该方法不仅对皮带跑偏的检测具有较高的准确率,而且算法简便,运算过程被简化,参数量较少,计算速度加快,运算效率高,能够实时的对皮带跑偏进行检测。该算法摆脱了深度学习需要大数据支持的缺点,同时也解决基于计算机视觉易受到图像噪声的影响,及现场环境复杂给皮带跑偏的边缘识别带来困难。
- 还没有人留言评论。精彩留言会获得点赞!