确定起重机的穿绳滑车的物理行程终点位置的自动方法与流程
本发明总体上涉及起重机的,特别是塔式起重机的。更具体地,为了起重机及其装备的安全,本发明涉及一种用于确定起重机的穿绳滑车的物理行程终点位置的自动方法。本发明发现了用于顶部回转起重机和自升式起重机的一种最受欢迎的但非限制性的应用。
背景技术:
1、众所周知,当起重机正在工作并且负载在向上提升过程中被其穿绳滑车提升时,穿绳滑车可以在上升时移动,直到该穿绳滑车到达与上部行程终点位置相对应的高度极限,并且与穿绳滑车悬挂在其上的分配吊运车的下侧相距预定的安全距离。将穿绳滑车停止在该上部行程终点位置的目的是为了防止该穿绳滑车在其上升过程中撞击在悬臂上平移移动的分配吊运车。吊运车和穿绳滑车之间的碰撞一方面可能损坏它们两者,以及最终损坏悬臂的元件;另一方面,潜在地导致提升缆绳的过度张紧和断裂以及由穿绳滑车提升的负载的全部或部分掉落在地面上,当负载掉落时,存在损坏材料和/或伤害位于穿绳滑车下面的工人的风险。
2、上部行程终点位置是起重机的控制命令系统按照为确定该上部行程终点位置而提供的确定程序存储的参数,并且该参数通常由起重机操作员在起重机的调试期间的一天的开始时执行;并且当起重机正在工作并且在一个或若干个提升操作期间被操纵时,控制命令系统然后自动应用当天的剩余时间,其中提升限制器与控制命令系统通信,从而当穿绳滑车接近上部行程终点位置时降低穿绳滑车的速度,并且当穿绳滑车到达上部行程终点位置时使穿绳滑车停止。
3、通常,确定程序是手动进行的,起重机操作员视觉估计安全距离并且将没有承载负载的穿绳滑车带回到他认为正确的上部行程终点位置。因此,该确定程序是不精确的,估计的上部行程终点位置或多或少地接近实际上部行程终点位置,因此不容易从一个确定程序再现到另一个确定程序。这就是起重机操作员相对于上部行程终点位置在距离方面采取额外安全余量的原因,使得起重机未得到最佳使用。对于起重机操作员来说在起动时省略进行该操作以尽快开始起重机的工作也是常见的。
4、已知的解决方案,比如文献wo21243981和cn208964423中的解决方案,提出了借助于电子装置在上部行程终点位置处自动停止穿绳滑车,所述电子装置具有以下缺点:被添加到已经被包括在起重机中的装备中并且与其控制命令系统通信;并且由若干元件构成。例如在wo21243981中提出的解决方案特别包括用于其实现的链接表、可编程控制器、变频器和与起重机的提升马达通信的modbusr通信多回路绝对值编码器;所有这些元件相互作用,并且可编程控制器与控制命令系统通信。
5、文献us2020/0247647a1提出,对于伸缩悬臂起重机,确定与提升缆绳和吊索的状态变化的位置相对应的吊钩的中间位置,所述提升缆绳和吊索从释放状态转变为张紧状态,以便避免提升负载时的水平摆动现象。
技术实现思路
1、本发明提出借助于一种用于确定负载提升操作的物理行程终点位置的自动方法来响应上述问题。这种自动方法的优点如下:
2、-减少人为干预,从而使人为错误的风险最小化并且提高安全性;
3、-自动方法的再现性和调整的可重复性,这可能是由物理行程终点位置的确定引起的。
4、本发明的另一个目的是在确定物理行程终点位置之后精确地确定起重机工作时的上部行程终点位置,上部行程终点位置在下文中被称为最大行程终点位置。
5、在这一特定点上,本发明具有两个优点:
6、-在起重机的调试期间节省时间,自动方法快速地确定物理行程终点位置,而起重机操作员通常估计最大行程终点位置至少十分钟,从而为起重机的开发和盈利提供相当大的时间节省;
7、-性能提高,特别是在吊钩下方高度的方面。由于物理行程终点位置和最大行程终点位置是精确估计的,因此可以最终减少分开两个位置的安全距离,从而优化起重机的能力。
8、本发明的另一个目的是在不向起重机中已经包括的装备添加装备的情况下实施自动方法。
9、与前一个目的相关,本发明的另一个目的是通过起重机的控制命令系统实施自动方法的确定。
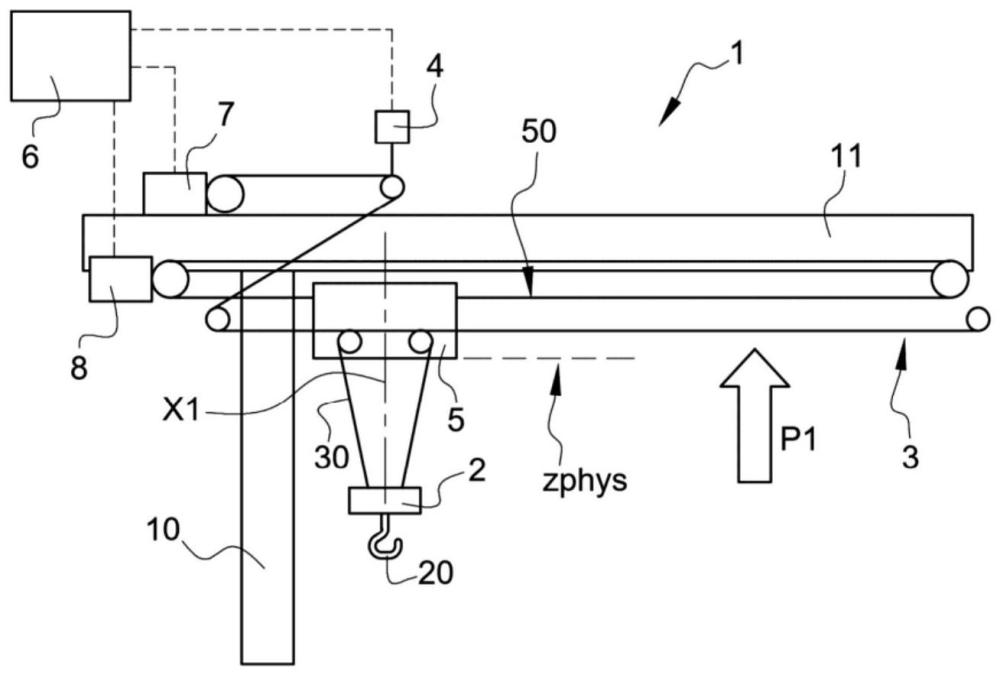
10、因此,本发明提出了一种用于确定起重机的穿绳滑车的物理行程终点位置的自动方法,该穿绳滑车可以借助于提升缆绳在上升和下降时移动,所述穿绳滑车通过提升缆绳从分配吊运车悬挂,所述自动方法包括穿绳滑车的上升阶段,在该上升阶段期间,提升缆绳的绳股上的力由监测装置测量,所述物理行程终点位置是根据提升缆绳的绳股上的力的变化而到达和确定的,所述物理行程终点位置对应于穿绳滑车与分配吊运车物理接触的位置。
11、换句话说,物理行程终点位置的确定是以自动方式实现的,并且物理行程终点位置的确定是基于在上升阶段期间当所述穿绳滑车在起重机的悬臂的方向上抬升时用于监测施加在提升穿绳滑车的提升缆绳上的力的装置的测量;在穿绳滑车的上升的这个阶段,当该监测装置测量到力的变化时,到达并且确定物理行程终点位置。
12、事实上,只要穿绳滑车位于物理行程终点位置下方,提升缆绳的绳股上的力就是稳定的,另一方面,一旦到达物理行程终点位置(换句话说,在与穿绳滑车的物理接触期间),该力突然变化,并且正是这种变化指示已经到达物理行程终点位置。
13、在自动方法中,从穿绳滑车与安装在起重机的悬臂上的吊运车的下侧接触的时刻开始,观察到提升缆绳的绳股上的力的变化。
14、根据本发明的一个特征,物理行程终点位置由提升缆绳的绳股上的力的增加来确定。
15、换句话说,在穿绳滑车和吊运车之间接触的时刻观察到的缆绳绳股上的力的变化导致该力的增加,特别是突然增加。
16、根据本发明的一个特征,提升缆绳的绳股上的力的增加通过所述力超过给定的力阈值或者力的变化的斜率高于给定的斜率值来表征。
17、换句话说,在上升阶段期间,绳股上的力代表提升缆绳所提升的重量。如果满足以下条件,则确定并认为已经到达物理行程终点位置:
18、-绳股上的力超过力阈值,该力阈值代表施加在缆绳上的附加张力,并且其将不仅仅是由于提升缆绳所提升的重量造成的。更精确地说,力阈值代表由缆绳提升的重量,对于该给定的重量,当穿绳滑车与吊运车接触时,产生的过度张力被添加到缆绳上;和/或
19、-力的增加在时间上足够突然/迅速,也就是说,力在非常短的时间间隔内呈现出显著的斜率的变化,这意味着该斜率之前的时刻t对应于穿绳滑车与吊运车接触的时刻,并且该斜率对应于所提升的重量加上由所提升的重量施加在提升缆绳中的过度张力和穿绳滑车在试图继续上升时被阻挡在吊运车下方而施加的力。
20、根据本发明的一个特征,上升阶段是在穿绳滑车空载的情况下进行的。
21、因此,在上升阶段和穿绳滑车与吊运车接触之前,绳股上的力仅仅是由于穿绳滑车本身的重量造成的。
22、上升阶段是在穿绳滑车空载的情况下进行的,几个原因如下:
23、-在穿绳滑车和吊运车接触的瞬间,不通过将负载附接到穿绳滑车的吊钩上而对提升缆绳施加不必要的过度张力;
24、-穿绳滑车的重量是恒定的,在接触之前和在接触的瞬间观察到的绳股上的力从自动方法的一个实施方式到另一个实施方式都是不变的,因此使得自动方法精确且可重复。
25、根据本发明的一个特征,上升阶段以低于最小速度的上升速度进行。
26、在上升阶段和确定物理行程终点位置的过程中,穿绳滑车以低速升高,以便防止穿绳滑车与悬挂它的吊运车过快碰撞并损坏穿绳滑车(和/或也被损坏)。该速度不超过预定的最小速度,预定的最小速度取决于起重机的类型以及所使用的驱动器、绞盘和穿绳系统。
27、根据本发明的一个特征,一旦到达并且确定物理行程终点位置,就停止上升阶段。
28、换句话说,当监测装置观察到提升缆绳的绳股上的力的变化时,这意味着穿绳滑车刚刚到达物理行程终点位置。穿绳滑车的上升前进,以及由此的上升阶段,立即停止。然后,起重机存储物理行程终点位置(例如,通过控制命令系统的存储器)。
29、根据本发明的一个特征,监测装置是安装在起重机上的负载传感器,以能够测量穿绳滑车的自重。
30、换句话说,该特征提出使用通常存在于起重机上的负载传感器,因为该负载传感器用于确定从穿绳滑车悬挂的负载的重量;这是有利的,因为它不使用专用传感器,而是使用已经存在的传感器。
31、根据本发明的一个实施例,负载传感器是安装在用于使提升缆绳返回的系统上的量规销(gague pin)。
32、换句话说,量规销安装在返回系统上,提升缆绳在该返回系统上卷绕或展开,量规销测量扭力,施加在缆绳的绳股上的力能够从所述扭力推导出。
33、有利地,量规销是安装在起重机上的装备的一体部分,以便测量施加在升降缆绳上的力并且确保起重机工作时升降操作的平稳运行。量规销不是添加到起重机上的附加监测装置,其唯一目的是允许确定物理行程终点位置。
34、根据本发明的一个特征,自动方法包括计算穿绳滑车的最大行程终点位置的步骤,该最大行程终点位置位于物理行程终点位置下方的预定的安全距离处。
35、更精确地说,物理行程终点位置一旦被确定就会被用作参考,以便计算穿绳滑车的最大行程终点位置。计算涉及分开两个位置的安全距离,该安全距离依据所考虑的起重机的类型而有所不同。由于本发明,与当前在手动地和可视地建立最大行程终点位置时实施的安全距离相比,所述安全距离可以减小。
36、根据本发明的一个特征,安全距离被包括在40至100cm之间。
37、有利地,安全距离被定义为使得自动方法可以在顶部回转起重机(对于适于在80和100cm之间的安全距离)和自升式起重机(对于适于在40和80cm之间的安全距离)中实施。
38、根据本发明的一个特征,一旦到达并且确定了物理行程终点位置,穿绳滑车就会下降,直到该穿绳滑车到达最大行程终点位置。
39、换句话说,一旦穿绳滑车到达了物理行程终点位置,该穿绳滑车就会下降与安全距离相对应的高度,以到达最大行程终点位置,该最大行程终点位置然后被起重机存储(更精确地说,被起重机的控制命令系统的存储器存储)。
40、根据本发明的一个特征,最大行程终点位置是在起重机工作时不被穿绳滑车超过的最大位置。
41、如前所述,最大行程终点位置对应于上部行程终点位置,该上部行程终点端位置对应于当起重机工作时在承载负载并且沿着悬臂的方向向上移动时穿绳滑车停止的高度。
42、根据本发明的一个特征,自动方法是在起动起重机时、在移动负载的任何工作之前进行的。
43、由于本发明,该方法可以在每次起动起重机时以强制方式实施,而起重机操作员不可能违反该方法。
44、根据本发明的一个特征,自动方法可以在起重机的活动的两个周期之间重复。
45、有利地,例如,如果起重机操作员观察到,在起重机的任何动作(例如,提升或分配操作)之后,当穿绳滑车必须返回其最大行程终点位置时,穿绳滑车停止的高度发生显著变化或不一致,则起重机操作员有可能在白天重新起动自动方法,使得再次确定和调整物理行程终点位置和最大行程终点位置。
46、为了能够再次精确地确定物理行程终点位置和最大行程终点位置,在注意没有负载悬挂在穿绳滑车上之后,必须在起重机的活动的两个周期之间重新起动自动方法。
47、根据本发明的一个特征,该自动方法在被包括在起重机中的控制/命令系统中实施,所述控制/命令系统至少链接到与提升缆绳联接的提升绞盘并且链接到监测装置。
48、有利地,自动方法在起重机的控制命令系统中实施并且由后者实施。
49、在使用负载传感器(比如量规销)作为监测装置的情况下,这意味着在确定物理行程终点位置时,不需要外部附加装备来实施或执行自动方法或者来监测和测量施加在绳股上的力。
- 还没有人留言评论。精彩留言会获得点赞!