一种罐体旋转定位方法及装置
本发明涉及机器视觉领域,具体而言,涉及一种罐体旋转定位方法及装置。
背景技术:
1、厂家在生产煤气罐时,需要对罐体上所刻的一些字符进行采集并生成电子标签,如钢印编码、二维码等,而工厂环境存在背景杂乱、光照条件差、罐体字符小而难以肉眼识别等问题,如果采用人工采集可能因人为因素造成误检、漏检,且效率不高。近年来,随着目标检测和图像识别算法的不断发展,采用机器视觉技术代替人工用于罐体的字符识别是最佳的选择,此项技术难点就在于如何将每个罐体都旋转到同样的位置进行检测。传统的方法是人为进行罐体旋转,但放到如今是行不通的。目前有运用摄像头采集罐体的图案,由控制程序驱动动力组件转动罐体,调整位置,实现罐体的定位的方法。该方法虽然能较为准确的实现定位,但缺点在于对图案的识别度还不是很高,并且每更换一种图案就要重新训练模型,以达到对新图案识别的效果,这无疑加大了整个项目的工作量,增加了工作强度。为解决这一难题,一种操作方便且精准定位的罐体定位方式和定位装置是目前所迫切需要的。
技术实现思路
1、本发明旨在提供一种罐体旋转定位方法及装置,以解决煤气罐的旋转定位问题。为了实现上述目的,本发明提供罐体旋转定位方法,该方法包括以下步骤:
2、步骤s1,顶升单元将待检测罐体顶升,使所述罐体脱离导轨并由夹持机构悬空夹住;
3、步骤s2,检测单元实时接收激光传感器信号,所述激光传感器位于罐体周边且所述激光传感器的安装高度使其发射的激光束能够在指定位置穿过所述罐体护罩提手形成的缺口处;
4、步骤s3,所述检测单元判断所有激光传感器信号是否为低电平状态,若判断所述所有激光传感器信号不为低电平状态,则执行步骤s4,若判断所述所有激光传感器状态为低电平状态,则执行步骤s5;
5、步骤s4,控制单元基于所述检测单元的判断结果为否时,给执行单元发出运动指令,以使所述执行单元驱动所述罐体旋转,重复执行步骤s2—步骤s4;
6、步骤s5,顶升单元将所述罐体降至导轨,罐体旋转定位完成。
7、进一步的,所述步骤s1中的顶升单元为顶升气缸或顶升油缸,所述罐体的顶升由顶升气缸动或顶升油缸动作所完成;所述夹持机构为分布于所述罐体周围的三个橡胶滚筒,且所述三个橡胶滚筒呈三角形位置分布。
8、进一步的,所述步骤s2中的检测单元包括激光传感器、数据采集设备;所述激光传感器共两个,通过两块折弯的钢板对称布置于罐体两侧,使得所述激光传感器发出的两条激光束相互交错,所述钢板通过可调整高度的连接件固定于机架上;所述激光传感器安装高度高于所述罐体护罩提手,当所述罐体被顶升后,所述激光传感器与所述罐体护罩提手同高;所述数据采集设备用于采集激光传感器信号,实时监控判断激光传感器的信号状态。
9、进一步的,所述步骤s4中的控制单元为plc控制器,plc控制器根据所述数据采集设备采集的激光传感器信号判断是否给所述执行单元发出运动指令;所述步骤s4中的执行单元包括驱动电机、链轮和链条;所述驱动电机输出端和所述橡胶滚筒的一端各装有一个链轮,所述两个链轮之间通过所述链条连接;所述执行单元接收到检测单元发出的运动指令,驱动电机启动并通过链轮和链条带动所述橡胶滚筒转动,所述橡胶滚筒通过摩擦传动直接带动所述罐体旋转。
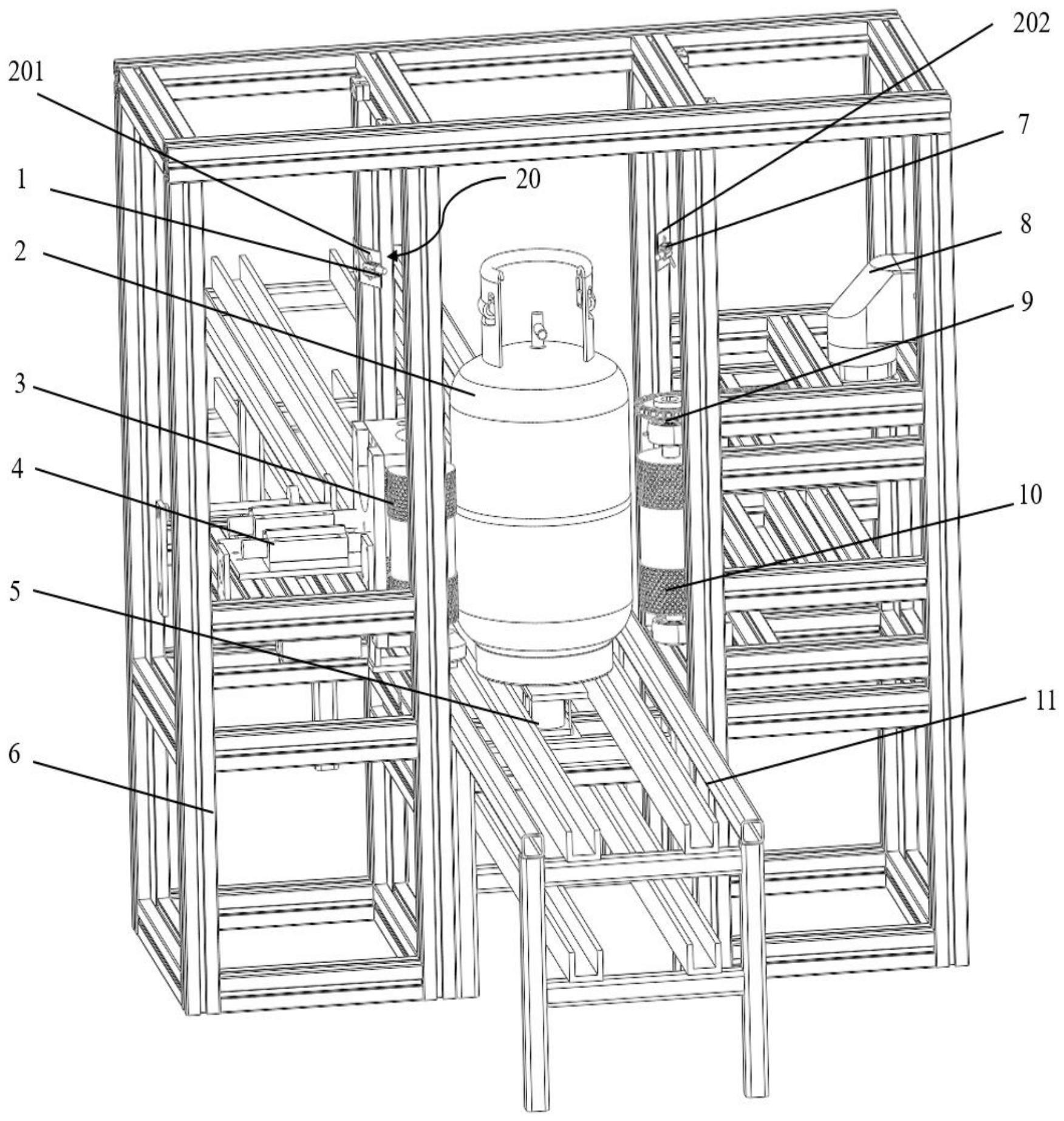
10、本发明还提供一种罐体旋转定位装置,该装置包括顶升单元、检测单元、控制单元、执行单元、推进气缸、机架和导轨,其中,所述罐体顶升单元用于将所述罐体顶升以脱离所述导轨;所述夹持机构安装于机架上用于将被顶升的罐体悬空夹住;所述检测单元用于检测所述罐体是否旋转到位;所述控制单元基于所述检测单元的检测结果控制执行单元驱动罐体旋转到位;所述推进气缸用于控制所述夹持机构的伸出和缩回。
11、进一步的,所述顶升单元为顶升油缸或顶升气缸,安装在所述罐体旋转定位装置底部、所述导轨下方,所述夹持机构为分布于所述罐体周围的三个橡胶滚筒,且所述三个橡胶滚筒呈三角形位置分布。
12、进一步的,所述检测单元包括激光传感器、数据采集设备;所述激光传感器连接到所述数据采集设备,所述数据采集设备用于采集所述激光传感器信号,实时监控判断所述激光传感器的信号状态;所述激光传感器共两个,利用两块折弯钢板使两个激光传感器固定在机架上,使得所述激光传感器发出的两条激光束相互交错,安装高度高于罐体护罩提手,当所述罐体被顶升后,所述激光传感器与所述罐体护罩提手形成的缺口处恰好在同一高度,以确保所述激光传感器发出的激光束能从护罩提手形成的缺口处穿过;在所述激光传感器发出的激光束处于无遮挡状态下,所述激光传感器的信号为低电平,当所述罐体进入检测装置时,所述激光传感器发出的激光束变为有遮挡状态,所述激光传感器的信号为高电平;所述罐体旋转到位时,所述两条激光束都能从所述激光传感器所在的同侧护罩提手形成的缺口处近端极限位置射入并从另一侧护罩提手形成的缺口处远端极限位置射出,所述两条激光束不会被所述罐体遮挡,所述激光传感器信号重新变为低电平。
13、进一步的,所述控制单元为plc控制器,所述数据采集设备连接到plc控制器,plc控制器根据数据采集设备采集的激光传感器信号判断是否给执行单元发出运动指令。
14、进一步的,所述执行单元包括驱动电机、链轮和链条;所述链轮共两个,一个安装于所述驱动电机的输出端,一个安装于所述橡胶滚筒的一端,两个链轮间通过所述链条连接,所述驱动电机通过链轮和链条带动所述橡胶滚筒旋转;所述驱动电机与所述plc控制器相连接。
15、进一步的,所述夹持机构由固定板、轴承组成,所述夹持机构安装在所述机架上,其中固定板安装位置位于所述罐体一侧,用来安装两个所述橡胶滚筒,轴承安装于罐体另一侧,共两个,用于安装与驱动电机相连接的橡胶滚筒,当罐体由顶升单元顶升后,夹持机构将罐体悬空夹住。
16、进一步的,所述推进气缸横向安装在所述机架上,安装高度与所述夹持机构固定板中部位置同高,所述推进气缸活塞杆伸出端与所述夹持机构固定板连接;所述推进气缸用于对所述夹持机构进行推出和缩回的作用,当所述气罐被顶升时,所述推进气缸伸出推动所述夹持机构伸出使所述罐体被悬空夹住,当所述罐体定位完成后所述推进气缸缩回使所述夹持机构一同缩回再由所述顶升单元将所述罐体降落至导轨。
17、与现有技术相比,本发明提供的罐体旋转定位方法及装置,有益效果在于:
18、一、本发明采用激光传感器检测、数据采集设备采集信号,对比机器视觉识别罐体上图案进行旋转定位,考虑机器视觉识别图像具有一定的失败率,本方法对于定位精度有所提高;对比传统人工旋转定位,本方法减轻工人的劳动强度。
19、二、本发明采用激光传感器及数据采集系统设备,使用成本低、性价比高。
20、三、本发明采用三个橡胶滚筒呈三角形分布夹住罐体,通过摩擦直接带动罐体旋转,无需另设置旋转平台,且橡胶滚筒质量轻、惯性小,对于旋转启停更好控制。
21、四、本发明采用两头大、中间小且在大头处加工出菱形花纹的橡胶滚筒,对于带动罐体表面光滑的煤气罐有着较好的传动效果;菱形花纹不用覆盖整个橡胶滚筒表面,橡胶滚筒整体加工成本低。
22、五、本发明可用于绝大多数罐体的旋转定位,市场前景好。
23、本发明为罐体的旋转定位提供了一种简单易操作的定位方法和定位装置,为工业上采集罐体信息提供了更好的选择。
- 还没有人留言评论。精彩留言会获得点赞!