一种动梁式龙门双轴不同步因素闭环辨识补偿方法及系统
本发明属于系统辨识与误差补偿领域,更具体地,涉及一种动梁式龙门双轴不同步因素闭环辨识补偿方法及系统。
背景技术:
1、动梁式龙门采用并行的双轴伺服系统共同推动横梁,由于前期制造和安装的差异、后期磨损和保养的区别、横梁在双轴之间的机械耦合等因素的共同影响,并行的双轴之间可能存在电气、机械等动力学特性上的差异,这种双轴特性的差异也称双轴不同步因素。不同步因素会在动梁式龙门运行过程中造成双轴运动状态的不同步,即产生同步误差。同步误差会造成系统运行带宽和控制精度的下降,严重时甚至会引发横梁剧烈的形变,损坏设备,诱发安全事故。
2、现有的龙门控制系统简化了对于不同步因素的分析,仅仅基于双轴同步误差状态进行同步补偿,由于状态补偿的滞后性,通常难以满足对同步性能要求较高的应用场景。因此,为了提升龙门同步控制性能,需要对双轴不同步因素进行辨识,并根据辨识结果进行基于模型的精确同步补偿。
3、现有技术方案为了获取双轴不同步因素,一般采用开环激励辨识方法,这种开环激励辨识方法需要对单轴注入合适的激励能量来激发同步误差。但是,动梁式龙门特殊的机械结构对激励能量产生了诸多限制,激励能量不足会造成激励不充分、辨识不准确,激励能量过大则可能诱发剧烈的同步误差,造成横梁的过度扭转形变,严重时甚至会导致机械抱死或设备损坏。因此,选取合适的激励能量往往费时费力,且难以保证辨识结果的有效性以及根据辨识结果进行同步补偿时的系统稳定性。
4、龙门中横梁连接形成的双轴机械耦合结构,使得多种不同步因素对于同步误差的影响相互耦合在一起,而同步误差还受到了系统运动状态的影响,往往是在龙门启动、换向等急动度、加速度迅速变化的工况下同步误差最为剧烈。现有技术方案忽略了龙门在起动、停车、换向等动态过程中不同步因素的影响,仅对静止或匀速状态下的同步误差进行补偿,导致同步控制性能的提升有限,无法实现高性能的同步控制效果。
技术实现思路
1、针对现有技术的缺陷和改进需求,本发明提供了一种动梁式龙门双轴不同步因素闭环辨识补偿方法及系统,其目的在于提升辨识效率及辨识稳定性。
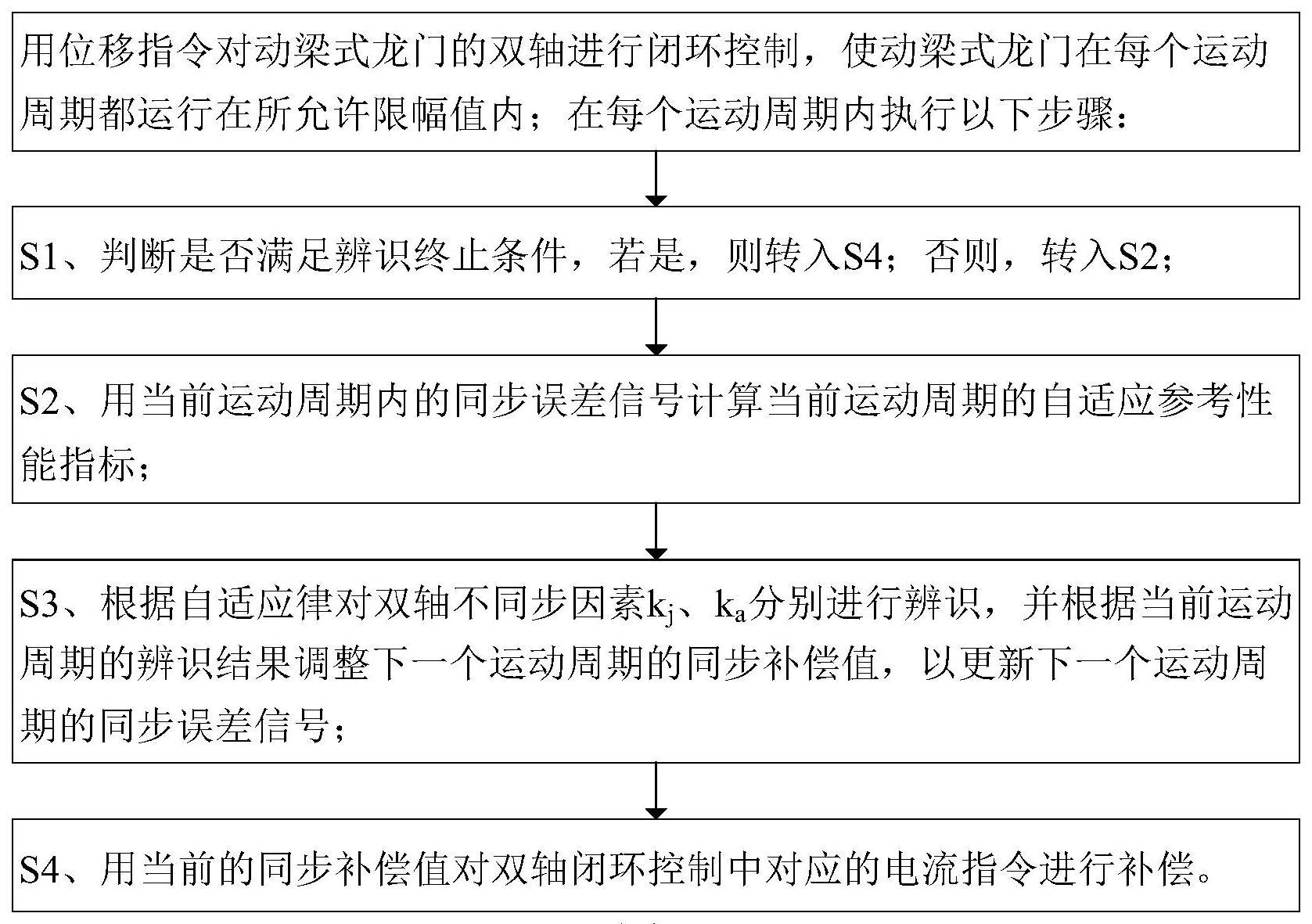
2、为实现上述目的,按照本发明的第一方面,提供了一种动梁式龙门双轴不同步因素闭环辨识补偿方法,包括:用位移指令s对动梁式龙门的双轴进行闭环控制,使动梁式龙门在每个运动周期都运行在所允许限幅值内;在每个运动周期内执行以下步骤:
3、s1、判断是否满足辨识终止条件,若是,则转入s4;否则,转入s2;
4、s2、用当前运动周期内的同步误差信号xsync(n)计算当前运动周期的自适应参考性能指标rmssync(n),n表示所述位移指令s的运动周期数,n≥1;
5、s3、根据自适应律对双轴不同步因素kj、ka分别进行辨识,并根据当前运动周期的辨识结果调整下一个运动周期的同步补偿值,以更新下一个运动周期的同步误差信号xsync(n+1);所述自适应律为:
6、
7、其中,p取j或a,分别表示对kj、ka进行辨识;为自适应步长;η(n)为步长的变化趋势;待辨识的双轴不同步因素kj、ka的初始值为0;
8、s4、用当前的同步补偿值对双轴闭环控制中对应的电流指令进行补偿。
9、进一步地,s1中,所述辨识终止条件为:
10、δrmssync(np-1)<0和δrmssync(np)≥0时,则完成对kp辨识,辨识结果为其中,p取j或a,当p取j时,表示对kj进行辨识,nj表示第nj个运动周期;当p取a时,表示对ka进行辨识,na表示第na个运动周期。
11、进一步地,s3中,根据当前运动周期的辨识结果调整所述下一个运动周期的同步补偿值,包括:
12、根据当前运动周期的辨识结果在下一个运动周期中,由双轴电机中一个电机的驱动电流指令im(n+1)计算出对另外一个电机驱动电流指令的同步补偿值ic(n+1):
13、
14、其中,s为s算子,b为补偿不同步因素时所需的惯性系数;分别为待辨识的双轴不同步因素kj、ka在当前运动周期的辨识结果;m取1或2,当m取1时,表示令x2轴向x1轴同步,当m取2时,表示令x1轴向x2轴同步。
15、进一步地,s2中,包括:
16、s21、获取位移指令当前运动周期内的双轴位置反馈信号x1(n)、x2(n);
17、s22、用所述双轴位置反馈信号x1(n)、x2(n)计算当前运动周期内的同步误差信号xsync(n);并基于所述同步误差信号得到当前运动周期的自适应参考性能指标rmssync(n):
18、
19、其中,ts表示每个运动周期的持续时间,且所述位移指令s对应的急动度曲线在一个运动周期内奇对称。
20、进一步地,s4中包括:
21、将所述同步补偿值叠加到对应电机驱动电流指令上,进行电流同步补偿。
22、进一步地,所述步长的变化趋势η(n)为:
23、
24、其中,trms为自适应阈值。
25、进一步地,所述自适应阈值trms的确定方法包括:
26、由期望的龙门不同步辨识与控制精度设定所述自适应阈值trms;
27、或,由期望的辨识时长tid和参考性能基准值rmsrwf计算所述自适应阈值trms:
28、
29、其中,所述参考性能基准值rmsref=rmssync(1)。
30、进一步地,s1中,所述限幅值包括最大急动度jmax、最大加速度amax、最大速度vmax、在双轴方向的最大位移pmax;
31、所述位移指令s的规划方法包括:
32、将所述位移指令s的持续时间ts划分为18个片段,对应的每个片段的持续时间依次为:t0、tj、ta、tj、tv、tj、ta、tj、t0、t0、tj、ta、tj、tv、tj、ta、tj、t0;且对应的每个片段的内双轴的急动度js依次为:0、jmax、0、-jmax、0、-jmax、0、jmax、0、0、-jmax、0、jmax、0、jmax、0、-jmax、0;
33、由所述限幅值规划出所述位移指令s在每个片段内对应的时间,以得到所述位移指令s,包括:
34、
35、其中,t0为空闲时间优化裕度。
36、按照本发明的第二方面,提供了一种动梁式龙门双轴不同步因素闭环辨识补偿系统,用于执行第一方面任一项所述的方法,所述系统包括:
37、闭环控制模块,用于用位移指令s对动梁式龙门的双轴进行闭环控制,使动梁式龙门在每个运动周期都运行在所允许限幅值内;
38、判断模块,用于判断是否满足辨识终止条件,若是,则执行同步补偿模块;若否,则执行指标计算模块、闭环辨识模块及同步补偿模块;
39、所述指标计算模块用于用当前运动周期内的同步误差信号xsync(n)计算当前运动周期的自适应参考性能指标rmssync(n),n表示所述位移指令的运动周期数,n≥1;
40、所述闭环辨识模块用于根据自适应律对双轴不同步因素kj、ka分别进行辨识;并根据当前运动周期的辨识结果调整下一个运动周期的同步补偿值,以更新下一个运动周期的同步误差信号xsync(n+1);
41、所述自适应律为:
42、
43、其中,p取j或a,分别表示对kj、ka进行辨识;为自适应步长;η(n)为步长的变化趋势;待辨识的双轴不同步因素kj、ka的初始值为0;
44、所述同步补偿模块用于用当前的同步补偿值对双轴闭环控制中对应的电流指令进行补偿。
45、按照本发明的第三方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现如第一方面任一项所述的方法。
46、总体而言,通过本发明所构思的以上技术方案,能够取得以下有益效果:
47、(1)本发明的方法,采用位移指令s对动梁式龙门的双轴进行闭环控制,辨识过程中,每个运动周期中在对指令进行跟踪时,双轴处于闭环状态,以当前运动周期内的同步误差信号xsync计算当前运动周期的自适应参考性能指标rmssync,以设计自适应律实现对双轴不同步因素进行辨识及补偿,设计的自适应律模型简单,具有较强的实用性;同时,根据动梁式龙门正常运行所允许的限幅值规划位移指令s,使得在整个闭环辨识过程中,系统始终运行在限幅范围内,确保了辨识过程的稳定性,以及对于双轴不同步因素的充分激励。相比于传统开环辨识方法费时费力的激励信号调整过程,能够显著提升辨识效率,同时降低不合适的开环激励信号或开环辨识误差造成设备损坏的风险,并提升根据辨识结果进行同步补偿时的系统稳定性。
48、(2)本发明的方法,根据驱动电流和运动加速度的近似比例关系,设计同步补偿公式,补偿公式中的与im的乘积与加速度相关,与im的乘积与急动度相关,因此,本发明中待辨识的两个参数分别与系统运行的急动度和加速度相关;也即,基于本发明设计的自适应律,并非辨识动梁式龙门系统中的某一具体物理参数,而是辨识与运动状态相关的一类不同步因素,提升了同步控制性能,同时也降低了方法对模型依赖度。
49、同时,相比基于同步误差等状态量补偿,补偿过程具有滞后性的缺陷,本发明设计的同步补偿公式,直接基于辨识得到的与系统运行的急动度、加速度相关联的双轴不同步因素值直接对驱动电流指令进行补偿,能够实现基于精确模型的实时补偿,有效提升同步补偿精度。
50、(3)进一步地,基于本发明设计的自适应律,将性能指标rmssync设计为平方项,并且位移指令对应的急动度曲线在一个运动周期内奇对称,使得加速度分量和急动度分量的耦合项在一个运动周期内的积分项为0,进而使得加速度分量和急动度分量对能指标rmssync的影响相互解耦,因而能够对两种双轴不同步因素分开进行辨识,在简化自适应律设计的同时提升了辨识准确度。
51、(4)作为优选,本发明中步长的变化趋势η参数的设计可以保证辨识过程中系统稳定,且辨识结果一定能收敛到真实值附近;采用自适应参考性能指标rmssync和自适应阈值trms设计自适应律,以实现对双轴不同步因素辨识,辨识过程简单;同时,直接将自适应阈值trms参与自适应律的设计中,便于调整及工程化设计,以及可以根据实际需求灵活设定闭环辨识的精度与用时。
52、总而言之,本发明的方法能够解决现有的动梁式龙门控制系统对双轴不同步因素辨识精度不足、辨识手段可靠性较低、同步控制效果较差等技术问题。能够实现对于双轴不同步因素低成本、高效率、高精度的辨识,并在动梁式龙门正常运行所允许的急动度、加速度、速度、位移等限制条件内有效提升双轴的同步控制性能。
- 还没有人留言评论。精彩留言会获得点赞!