一种基于力传感器的货物自由取放智能货架及方法
本发明属于智能货架领域,具体地,涉及用于货物自由取放管理的智能货架,尤其是基于力传感器的货物自由取放管理智能货架及方法。
背景技术:
1、飞机装配过程中需要制作大量安装孔,为保证钻孔的位置精度,通常通过钻模板进行制孔。通过货架进行管理钻模板时,由于钻模板数量多且外观相似难以区分,操作人员通常需要频繁查阅管理手册来寻找和归位钻模板,过程繁琐易错,降低了工作效率与工作连贯性。
2、专利文献cn202110930531.0公开了一种物料管理方法和智能货架,包括货架本体、检测模块和控制模块;检测模块包含与货架本体物料格栅一一对应的多个检测单元,检测单元用于检测栅格中折射后的光信号并将之发送至控制模块,控制模块将光信号转化为数字量信号,并将所述数字量信号与预设检测值对比,以确定所述物料格栅是否有物料放入。
3、采用该现有智能货架进行钻模板取放管理时,检测单元仅能检测出对应的格栅中是否有钻模板放入,但是不能直接识别所放入的钻模板的种类。如果要识别钻模板种类,需要在钻模板上提前打码或者贴码,然后再采用扫码枪扫码并传输给管理终端,建立数据库,导致整个管理工作流程繁多,存取效率低。
技术实现思路
1、飞机装配过程中所采用钻模板材质为金属材料制成,密度较大,不同钻模板重量差异大,为了实现操作人员自由取放钻模板且不打断工作流程,本发明提出一种基于力传感器的货物自由取放智能货架及方法,操作者可以在任意货位中自由取放钻模板,智能货架将自动记录并更新钻模板的种类及取放位置,通过输入查找指令可快速查找到所需钻模板。
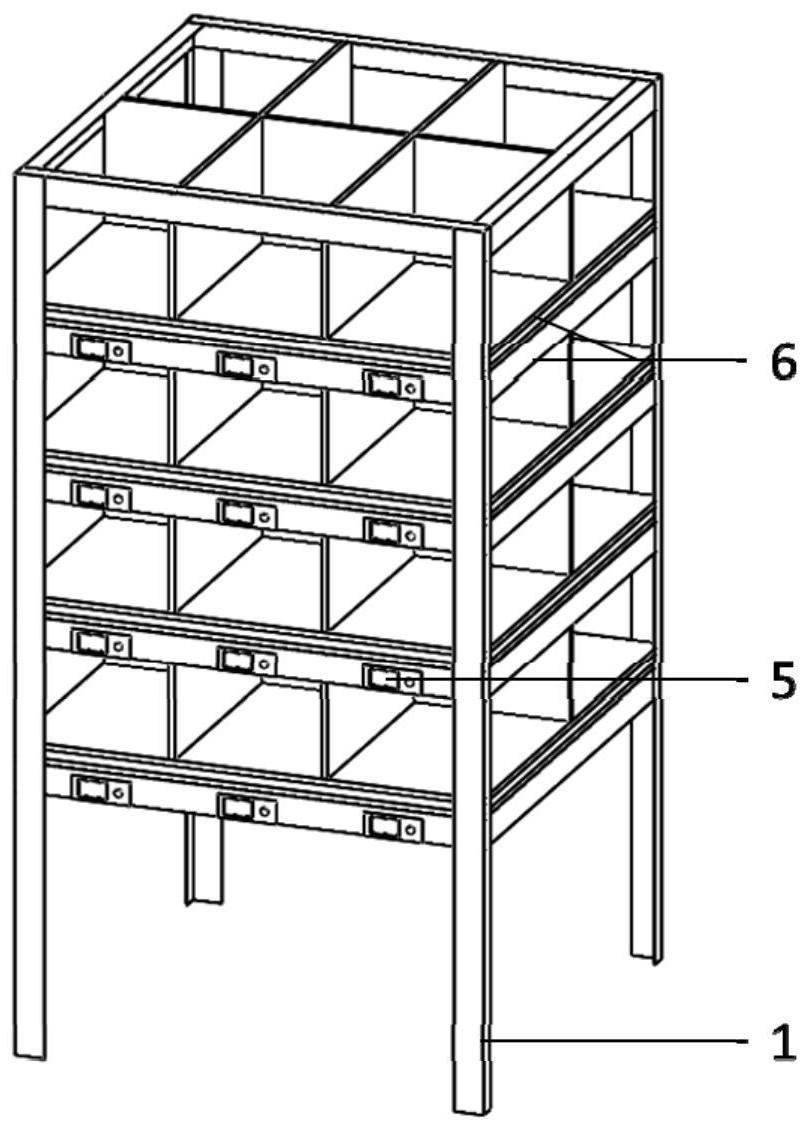
2、本发明的技术方案是:一种基于力传感器的货物自由取放智能货架,其特别之处在于,包括货架本体、层板组件、力与力矩传感器、显示模块和控制模块;
3、多个所述层板组件将货架本体分隔成多层,每层上设有若干个货位;
4、所述每个货位上均设有显示模块,用于显示货位信息及对应的货物信息;
5、所述层板组件上设有力与力矩传感器,用于在取放货物前后检测该层板组件上的力和力矩,并反馈给所述控制模块;
6、定义垂直于层板组件方向为所述力与力矩传感器的z轴,x轴和y轴位于层板组件所在平面上;
7、所述控制模块能够接收处理所述力与力矩传感器测得的数据,对取放的货物类别自动识别判断,并控制显示模块更新货位及该货位上的货物信息。
8、进一步的,所述层板组件为由基板和层板组成的复合结构,所述力与力矩传感器位于基板和层板之间中心位置。
9、进一步的,所述力与力矩传感器采用六自由度力传感器。
10、进一步的,还包括提示模块,所述提示模块与控制模块连接,能够在收到所述控制模块的控制指令后,提示货物存取结果。
11、采用基于力传感器的货物自由取放智能货架进行货物管理的方法,包括自由存取的管理,具体包括以下步骤:
12、步骤1、建立包含货物编号、货位编号以及货位平面坐标的数据库,所述数据库中不同种类货物重量不同;六自由度力传感器检测各层上的力及力矩并反馈给所述控制模块;
13、步骤2、在任意货位上拿取或放置货物后,六自由度力传感器检测该层层板所受力和力矩信息并发送给所述控制模块;
14、步骤3、所述控制模块接收步骤1和步骤2检测的力和力矩信息,计算该层层板上力的变化量δfz及力矩的变化量δmx和δmy,并将δfz与所述控制模块数据库中货物的重力集合g={g1,g2,...,gn}逐个进行对比:
15、若||δfz|-|gi||≤θf,则匹配成功,表明拿取或放置的货物编号为i,通过货物编号确定货物种类;
16、若||δfz|-|gi||>θf,则匹配失败,继续比对下一个值,gi∈g;如果全部匹配失败,则表明该货架数据库中无此货物信息,所述控制模块控制所述提示模块发出警告;
17、其中,θf为误差阈值;
18、步骤4、所述控制模块根据拿取或放置货物前后力和力矩的变化量,计算拿取或放置的货物在该层上的二维平面坐标(x,y),并将该坐标与数据库中所有货位的二维平面坐标进行对比:
19、如果|x-xp,q|≤θx且|y-yp,q|≤θy,则表明拿取货物所在的货位中心坐标为(xp,q,yp,q),其中(p,q)为货位编号;
20、如果|x-xp,q|≥θx或|y-yp,q|≥θy,则表明拿取货物所在的货位中心坐标不为(xp,q,yp,q),继续比对下一个货位的中心坐标;
21、其中,θx、θy分别为货位x坐标的范围阈值和y坐标的范围阈值;
22、步骤5、所述控制模块更新数据库中拿取或放置的货物状态,并将更新后信息发送给显示模块,所述显示模块显示对应货位状态,所述提示模块播报拿取或放置的货物类别和对应的货位信息。
23、进一步的,所述步骤3中,所述控制模块接收步骤1和步骤2检测的力和力矩信息,计算该层层板上力的变化量δfz及力矩的变化量δmx和δmy的过程为:
24、δfz=fz'-fz=f
25、δmx=mx'-mx=fy
26、δmy=my'-my=fx
27、其中,fz'为拿取或放置货物后层板沿z轴所受力,fz为拿取或放置货物前层板沿z轴所受力;
28、mx'和my'分别为拿取或放置货物后该层板沿x轴和y轴所受力矩,mx和my分别为拿取或放置货物前该层板沿x轴和y轴所受力矩;
29、f为拿取或放置的货物的重力,x和y分别为拿取或放置的货物在该层上的二维坐标值。
30、进一步的,所述步骤3中θf的确定方法为:对数据库中的所有种类货物的重力,取两两之差绝对值中最小的值。
31、进一步的,定义货位沿x轴尺寸为长度,沿y轴尺寸为宽度,所述步骤4中θx和θy分别取货位长度的一半和宽度的一半。
32、采用基于力传感器的货物自由取放智能货架进行货物管理的方法,还包括拿取指定货物的管理,具体包括:
33、步骤a、操作者输入查询指令,所述控制模块将收到的查询指令与数据库中所有货物信息或货位信息进行对比,判断货物状态和货位状态:
34、步骤b、如果所要拿取的货物属于本货架且为入库状态,所述控制模块向该货物所在货位的显示模块发送货物信息,该显示模块显示货位信息和对应货物信息;
35、如果所要拿取的货物属于本货架且为已出库状态,所述控制模块向所述提示模块发送该货物状态信息,所述提示模块发出该货物已出库语音提示;
36、如果所述数据库中不存在该货物信息,所述控制模块向所述提示模块发送指令,所述提示模块发出语音警告。
37、进一步的,拿取指定货物时,操作者输入的查询指令为货物编号或货位编号。
38、有益效果
39、1、本发明智能货架通过在每层货架上设置一组力传感器和力矩传感器,操作者可以任意拿取货物或在任意空货位中放置货物,力传感器将放置前后监测到的该层板力和力矩的变化信息传送和微型电脑,微型电脑能够自动识别出货物类型与位置,并实时更新货物数据库,减少了管理所需设备和工作流程,解决了背景技术中钻模板的取放管理难题。
40、2、本发明中在微型电脑上设置扬声器,在每个货位上设有led显示器,在货物取放状态变化后,微型电脑向led显示器发送指令,led显示器能及时更新显示货物信息,便于操作者观察每个货位的存放信息;同时微型电脑通过扬声器向操作人员发出货物存取状态提示。
41、3、本发明智能货架还具有快速查询功能,操作者可以向微型电脑输入所要查询的货物信息,微型电脑接收指令后通过与数据库中货物信息进行对比,并向led显示器发送指令,led显示器显示提示信息,并通过扬声器发出货物状态,操作人员可以迅速根据显示器信息进行存取操作,并提示语音确定是否成功完成存取。
42、4、本发明智能货架适用于重量之间存在较大差别的货物,对于重量差别较小的货物,可以选择精度较高的力与力矩传感器进行检测。
- 还没有人留言评论。精彩留言会获得点赞!