一种取料流量的协同控制方法及装置与流程
本发明涉及取料流量控制,尤其涉及一种取料流量的协同控制方法及装置。
背景技术:
1、为取不同的煤种,2台自动配煤作业的取料机一般在空间上相隔较远。二者在配煤作业时独立取煤,并且各自瞬时流量之和不超过流程额定瞬时流量。但在作业过程中,上游取料机会因煤堆模型不准或煤堆塌垛等原因,出现超过瞬时流量设定值的大量情况,从而大量煤堆到达下游取料机处,如果此时下游取料机仍按原设定瞬时流量取料,则二者煤流合流之后必然会出现超出流程额定流量,而如果下游取料机也出现了大于原设定瞬时流量的煤流,则二者汇合之后便会出现峰值,这时候下游设备会出现撒煤甚至堵煤的情况,严重破坏清洁生产的原则。
技术实现思路
1、本发明提供一种取料流量的协同控制方法及装置,用于通过将上游取料机的上游皮带秤瞬时流量信息空间上虚拟平移至下游取料机处,下游取料机可以根据上游皮带瞬时流量信息,适当调整自身取料速度,从而消除配煤时煤流大量及峰值情况。
2、第一方面,本发明提供了一种取料流量的协同控制方法,包括:
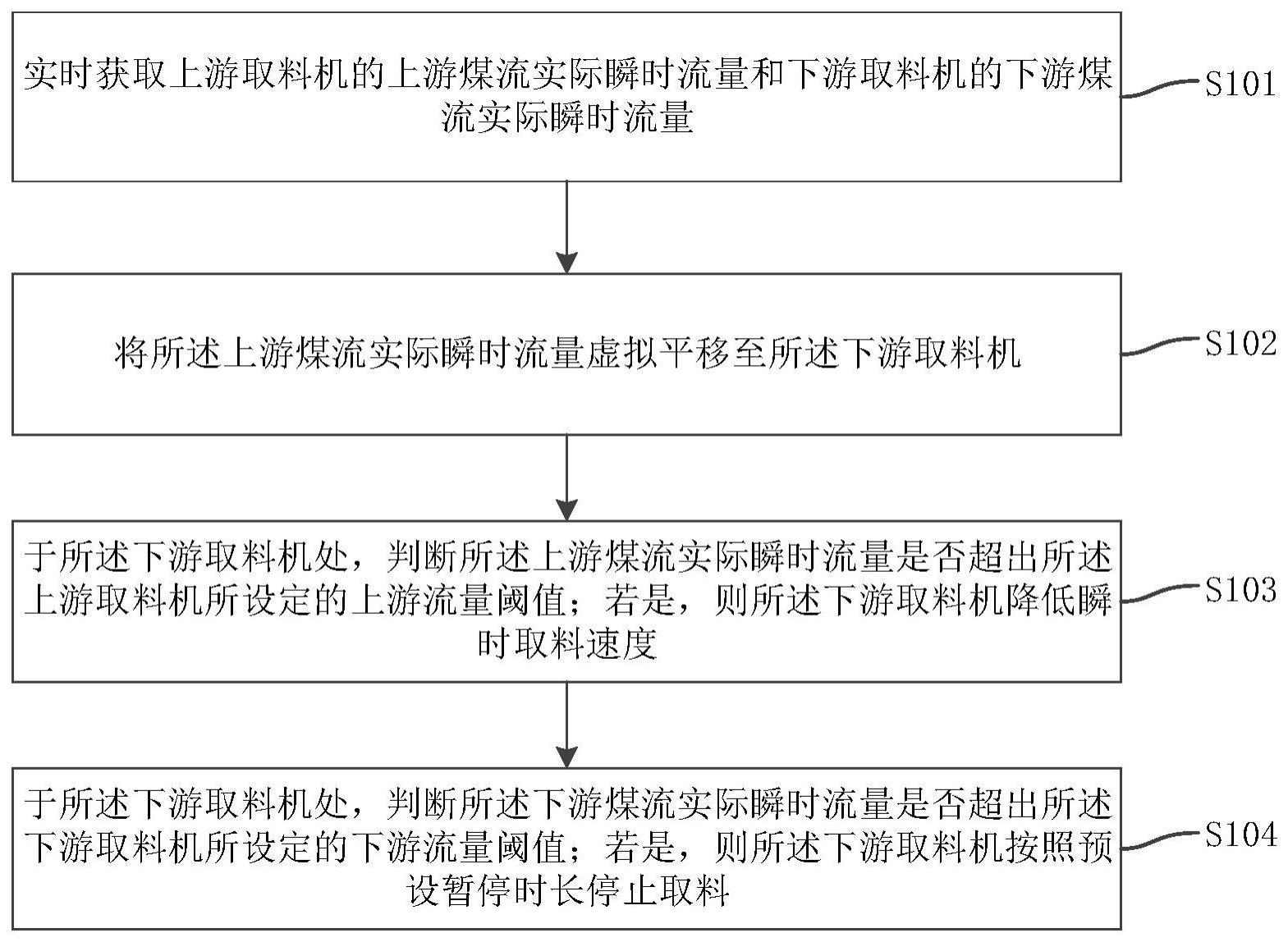
3、实时获取上游取料机的上游煤流实际瞬时流量和下游取料机的下游煤流实际瞬时流量;
4、将所述上游煤流实际瞬时流量虚拟平移至所述下游取料机;
5、于所述下游取料机处,判断所述上游煤流实际瞬时流量是否超出所述上游取料机所设定的上游流量阈值;若是,则所述下游取料机降低瞬时取料速度;
6、于所述下游取料机处,判断所述下游煤流实际瞬时流量是否超出所述下游取料机所设定的下游流量阈值;若是,则所述下游取料机按照预设暂停时长停止取料。
7、可选地,所述将所述上游煤流实际瞬时流量虚拟平移至所述下游取料机的步骤,包括:
8、获取所述上游取料机和所述下游取料机间的机器位置差,以及皮带速度值;
9、根据所述机器位置差和所述皮带速度值,确定从所述上游取料机到所述下游取料机间的到达时长;所述达到时长与所述预设暂停时长大小相同;
10、通过所述到达时长,确定所述上游取料机在经过所述下游取料机时的虚拟平移后的上游煤流实际瞬时流量,以实现所述上游煤流实际瞬时流量的虚拟平移。
11、可选地,所述上游取料机和所述下游取料机间设有节点;若所述上游取料机和所述下游取料机间的距离超出预先设定的距离阈值,则所述将所述上游煤流实际瞬时流量虚拟平移至所述下游取料机的步骤,包括:
12、获取所述节点与所述上游取料机的上位位置差,所述节点与所述下游取料机间的下位位置差,以及所述皮带速度值;
13、基于所述上位位置差、所述下位位置及所述皮带速度值,确定从所述上游取料机到所述节点的上游到达时长,以及从所述节点到所述下游取料机的下游到达时长;
14、基于所述上游到达时长和所述下游到达时长,将所述上游皮带秤瞬时流量信息虚拟平移至所述上游取料机和下游取料机间的预设位置点。
15、可选地,所述通过所述到达时长,确定所述上游取料机在经过所述下游取料机时的虚拟平移后的上游煤流实际瞬时流量,以实现所述上游煤流实际瞬时流量的虚拟平移的步骤,包括:
16、利用pcl算法,将所述上游取料机的上游皮带秤流程虚拟平移至所述下游取料机处;
17、从所述上游皮带秤流程中获取所述上游取料机在所述到达时长前所取的煤流量;
18、基于所述煤流量和所述到达时长,确定所述虚拟平移后的上游煤流实际瞬时流量。
19、第二方面,本发明提供了一种取料流量的协同控制装置,包括:
20、获取模块,用于实时获取上游取料机的上游煤流实际瞬时流量和下游取料机的下游煤流实际瞬时流量;
21、虚拟平移模块,用于将所述上游煤流实际瞬时流量虚拟平移至所述下游取料机;
22、第一判断模块,用于于所述下游取料机处,判断所述上游煤流实际瞬时流量是否超出所述上游取料机所设定的上游流量阈值;若是,则所述下游取料机降低瞬时取料速度;
23、第二判断模块,用于于所述下游取料机处,判断所述下游煤流实际瞬时流量是否超出所述下游取料机所设定的下游流量阈值;若是,则所述下游取料机按照预设暂停时长停止取料。
24、可选地,所述虚拟平移模块包括:
25、第一获取子模块,用于获取所述上游取料机和所述下游取料机间的机器位置差,以及皮带速度值;
26、第一到达时长确定子模块,用于根据所述机器位置差和所述皮带速度值,确定从所述上游取料机到所述下游取料机间的到达时长;所述达到时长与所述预设暂停时长大小相同;
27、第一虚拟平移子模块,用于通过所述到达时长,确定所述上游取料机在经过所述下游取料机时的虚拟平移后的上游煤流实际瞬时流量,以实现所述上游煤流实际瞬时流量的虚拟平移。
28、可选地,所述上游取料机和所述下游取料机间设有节点;若所述上游取料机和所述下游取料机间的距离超出预先设定的距离阈值,则所述虚拟平移模块包括:
29、第二获取子模块,用于获取所述节点与所述上游取料机的上位位置差,所述节点与所述下游取料机间的下位位置差,以及所述皮带速度值;
30、第二到达时长确定子模块,用于基于所述上位位置差、所述下位位置及所述皮带速度值,确定从所述上游取料机到所述节点的上游到达时长,以及从所述节点到所述下游取料机的下游到达时长;
31、第二虚拟平移子模块,用于基于所述上游到达时长和所述下游到达时长,将所述上游皮带秤瞬时流量信息虚拟平移至所述上游取料机和下游取料机间的预设位置点。
32、可选地,所述第一虚拟平移子模块包括:
33、流程平移单元,用于利用pcl算法,将所述上游取料机的上游皮带秤流程虚拟平移至所述下游取料机处;
34、煤流量确定单元,用于从所述上游皮带秤流程中获取所述上游取料机在所述到达时长前所取的煤流量;
35、虚拟平移单元,用于基于所述煤流量和所述到达时长,确定所述虚拟平移后的上游煤流实际瞬时流量。
36、第三方面,本技术提供一种电子设备,包括处理器以及存储器,所述存储器存储有计算机可读取指令,当所述计算机可读取指令由所述处理器执行时,运行如上述第一方面提供的所述方法中的步骤。
37、第四方面,本技术提供一种存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时运行如上述第一方面提供的所述方法中的步骤。
38、从以上技术方案可以看出,本发明具有以下优点:
39、本发明提供了一种取料流量的协同控制方法及装置,方法包括:实时获取上游取料机的上游煤流实际瞬时流量和下游取料机的下游煤流实际瞬时流量;将所述上游煤流实际瞬时流量虚拟平移至所述下游取料机;于所述下游取料机处,判断所述上游煤流实际瞬时流量是否超出所述上游取料机所设定的上游流量阈值;若是,则所述下游取料机降低瞬时取料速度;于所述下游取料机处,判断所述下游煤流实际瞬时流量是否超出所述下游取料机所设定的下游流量阈值;若是,则所述下游取料机按照预设暂停时长停止取料。通过将上游取料机的上游皮带秤瞬时流量信息空间上虚拟平移至下游取料机处,下游取料机可以根据上游皮带瞬时流量信息,适当调整自身取料速度,从而消除配煤时煤流大量及峰值情况。
- 还没有人留言评论。精彩留言会获得点赞!