高重量探针卡移送及装载装置的制作方法
本发明涉及一种高重量探针卡移送及装载装置。更详细地,涉及如下的高重量探针卡移送及装载装置,即,通过在沿着预设的运行路径进行移动的过程中拾取、移送及装载高重量探针卡来能够稳定地适时供给高价的高重量探针卡,从而可使生产效率最大化,即便在不配置作业人员的状态下,也能够实现无人移送及装载。
背景技术:
1、通常,探针卡应根据所制造的半导体器件得到各种更换、变更来使用。
2、在此情况下,探针卡的更换由设置于检查装置的探针卡更换装置来实施,向探针卡更换装置供给探针卡来进行放置的作业则由作业人员人工完成。
3、但是,高重量探针卡的重量达到25kg~40kg,因此在供给及放置高重量探针卡来进行更换的情况下,由于需由作业人员直接挪动要更换的探针卡并直接放置于上述探针卡更换装置,因而如上所述的探针卡的大直径及高重量对于作业人员来讲是一种负担,因而只会增加探针卡的更换时间,上述探针卡的更换时间增加则意味着最终导致探针卡的检测工序的作业时间增加,只会降低探针卡的生产率。
4、并且,存在有可能因用过大的力进行作业的作业人员的失误而造成对探针卡施加冲击的隐患,这最终会引起探针卡受损或破损,因而存在作业性及生产率严重下降的问题。
5、而且,若要更换探针卡,则作业人员需靠近检查装置的侧面从探针卡更换装置分离使用完的探针卡并供给及放置新的探针卡,因而在有多个检查装置的作业线上,存在对每个检查装置都要确保用于更换上述探针卡的单独的作业空间的问题。
6、在这里,上述背景技术或现有技术仅用于帮助理解本发明的技术意义,并不意味着本发明申请前的本发明所属技术领域中周知的技术。
7、现有技术文献
8、专利文献
9、专利文献1:韩国授权专利第10-0833285号
技术实现思路
1、本发明是为了解决如上所述的问题而根据上述背景技术提出,其目的在于提供如下的高重量探针卡移送及装载装置,即,通过在沿着预设的运行路径进行移动的过程中拾取、移送及装载高重量探针卡来能够稳定地适时供给高价的高重量探针卡,从而可使生产效率最大化。
2、并且,本发明的目的在于提供如下的高重量探针卡移送及装载装置,即,即便在不配置作业人员的状态下,也能够沿着预设的自动运行路径来对高重量探针卡实现无人移送及装载,因而无需配置作业人员的空间,仅用对于运行路径的最小作业空间也能够实现高重量探针卡的移送及装载。
3、但是,本发明的目的并不限定于此,还包括即使未明确提及也能够从技术方案或实施方式掌握到的目的或效果。
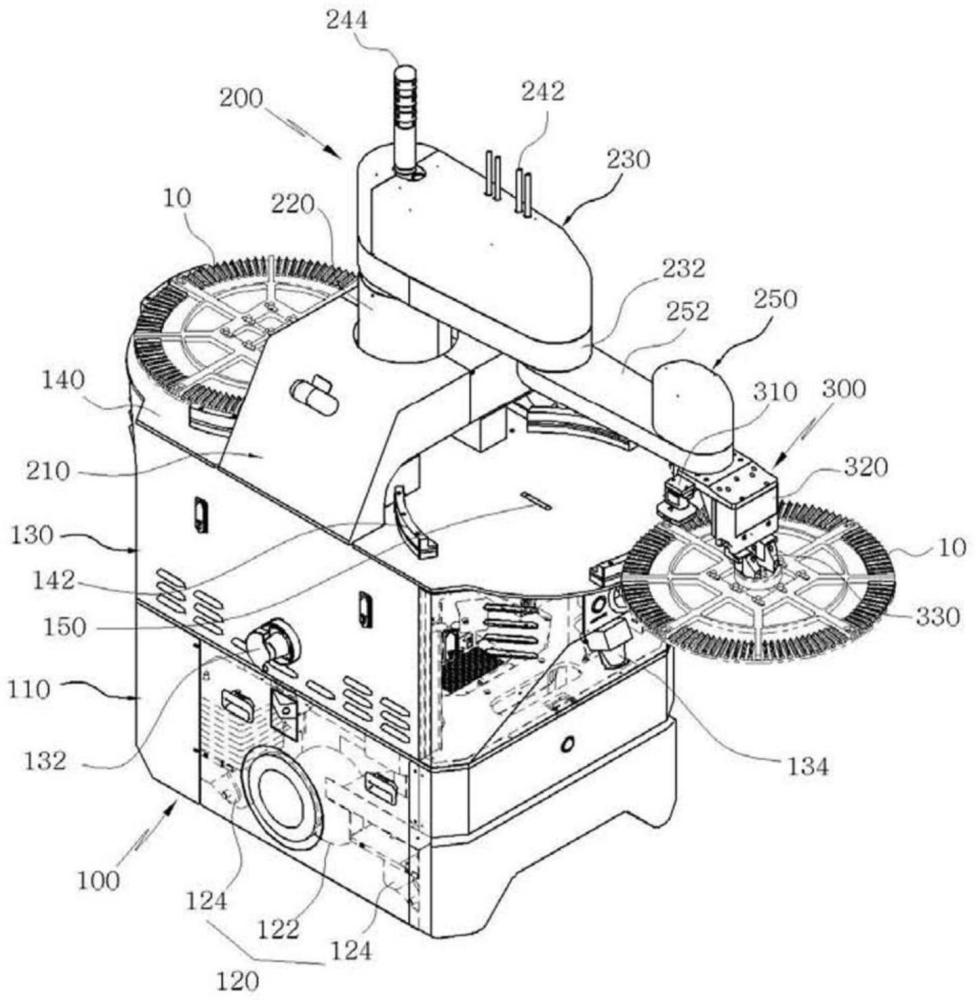
4、根据用于实现如上所述的目的的本发明的一实施例,其特征在于,包括:本体部100,沿着预设的运行路径进行移动;装载臂组件200,与上述本体部100相结合,包括升降单元部210、第一臂驱动部230、第二臂驱动部250,上述升降单元部210能够执行上升或下降动作,上述第一臂驱动部23以可旋转的方式与上述升降单元部210相结合,上述第二臂驱动部250以可旋转的方式与上述第一臂驱动部230的另一端部相结合;以及夹持器部300,以可旋转的方式与上述第二臂驱动部250相结合,把持高重量探针卡并放置于上述本体部100。
5、根据本发明的一实施例,其特征在于,上述本体部100包括:移送本体部110,设置有沿着上述运行路径移动的移送机构120;控制本体部130,内置有用于对上述探针卡移送及装载装置的驱动进行控制的驱动控制部及电池,并安装有上述装载臂组件200;装载上板140,与上述控制本体部130的上部相结合,以能够使探针卡放置于准确位置的方式进行支撑;放置检测传感器150,设置于上述装载上板140,检测是否放置探针卡并传输至上述驱动控制部;以及充电单元部160,形成于上述控制本体部130,用于实现上述电池与对接装置的电连接。
6、根据本发明的一实施例,其特征在于,上述控制本体部130包括:安全激光传感器132,用于识别障碍物,能够避开所识别的障碍物来实现运行;以及装载臂动作探索部134,能够通过检测上述装载臂组件200是否进行动作来掌握上述装载臂组件200的动作状态。
7、根据本发明的一实施例,其特征在于,上述控制本体部130包括:驱动控制部,通过分析从上述安全激光传感器132及装载臂动作探索部134传输的多个信息来生成与探针卡的取出及更换位置、对所取出的探针卡进行搬送的搬送位置相关的路径信息;以及操作模块139,向上述驱动控制部传输用于对探针卡移送及装载装置的驱动进行控制的控制信号。
8、根据本发明的一实施例,其特征在于,上述升降单元部210包括:升降马达212,根据驱动控制部的控制进行驱动;滚珠丝杠214,在驱动上述升降马达212时实现上升或下降动作;升降引导板218,在上述滚珠丝杠214工作时进行上升或下降,在其上侧中心部形成与上述第一臂驱动部230相连接的升降轴220;以及线性导轨部件216,在上述滚珠丝杠214工作时引导升降引导板218的上升或下降动作。
9、根据本发明的一实施例,其特征在于,上述第一臂驱动部230包括:第一臂驱动外罩232,设置有通信及控制部242;第一臂旋转机构234,设置于上述第一臂驱动外罩232的前方部及后方部,分别与上述第二臂驱动部250及上述升降单元部210相连接;后方侧连接驱动器236,以可旋转的方式与上述第一臂旋转机构234相连接,用于使上述第一臂驱动外罩232进行旋转;以及前方侧连接驱动器238,以可旋转的方式与上述第一臂旋转机构234相连接,用于使上述第二臂驱动部250进行旋转。
10、根据本发明的一实施例,其特征在于,上述第二臂驱动部250包括:第二臂驱动外罩252;臂连接部件256,设置于上述第二臂驱动外罩252的后方部,与上述后方侧连接驱动器238相连接;夹持器连接驱动器258,设置于上述第二臂驱动外罩252的前方部,夹持器部300以可旋转的方式相结合;以及第二臂旋转机构254,用于使上述夹持器连接驱动器258进行旋转。
11、根据本发明的一实施例,其特征在于,上述夹持器部300包括:夹持器340,用于把持上述高重量探针卡;安装框架320,以可旋转的方式与上述第二臂驱动部250相结合;以及视觉摄像头310,与上述安装框架320相结合,用于掌握上述夹持器340的把持位置。
12、根据本发明的一实施例,其特征在于,上述安装框架320包括:位置引导框架324,与前方侧端部相结合,安装有用于调节上述夹持器340的位置的位置操作部件326;以及夹持器尖端328,以能够滑动的方式与上述位置引导框架324的下端部相结合,与上述夹持器340相结合。
13、根据如上所述的本发明的实施例,本发明的效果在于,通过在沿着预设的运行路径进行移动的过程中拾取、移送及装载高重量探针卡来能够稳定地适时供给高价的高重量探针卡,从而可使生产效率最大化。
14、并且,根据本发明的实施例,本发明的效果在于,即便在不配置作业人员的状态下,也能够沿着预设的自动运行路径来对高重量探针卡实现无人移送及装载,因而无需配置作业人员的空间,仅用对于运行路径的最小作业空间也能够实现高重量探针卡的移送及装载。
15、而且,本发明的多种多样且有益的优点和效果并不限定于上述内容,可在对本发明的具体实施方式进行说明的过程中更加轻松理解。
- 还没有人留言评论。精彩留言会获得点赞!