一种适用于箱式货运袋装物料的智能卸车机的制作方法
本发明涉及自动化装载设备,特别涉及一种适用于箱式货运袋装物料的智能卸车机。
背景技术:
1、目前行业上袋包货物的运输主要采用火车棚车或厢式货车等方式。因为袋包容易变形、形状不规则;堆放时人工操作,袋包之间间距大小不可控;运输过程中袋包在整车的的刹车、启动下会产生位移改变,所以在卸车过程中要实现机械化搬运存在很大难度。目前行业内袋包货物的卸车和仓库搬运主要是人抬、人扛辅以叉车或者简易的输送设备完成,工人的劳动强度大、工作环境差、装卸效率低,企业的人工成本高、生产效率低、自动化程度低。
2、为了实现火车棚车的高效装卸,便于物料的搬运,现有技术中通过会采用自动控制的机械手对物料进行夹取,但不能进行尺寸上调整或者调整的幅度有限,会造成对于不同尺寸的物料适用性不足的问题。
技术实现思路
1、为解决以上问题,本发明了提供了一种适用于箱式货运袋装物料的智能卸车机,使用机械臂抓取袋包,抓取可靠、移动灵活,便于智能控制且适应性高,使卸车机不仅可以进行棚车、货车等运输工具上的袋包卸料,还能运用于库房的袋包货物转运。配备有袋包视觉识别智能化系统,可精准识别袋包位置、姿态等,能够辅助机载机械设备高效装卸车作业,大大减轻了装卸工人的劳动强度,提高了装卸效率。
2、本发明为解决技术问题采用如下技术方案:
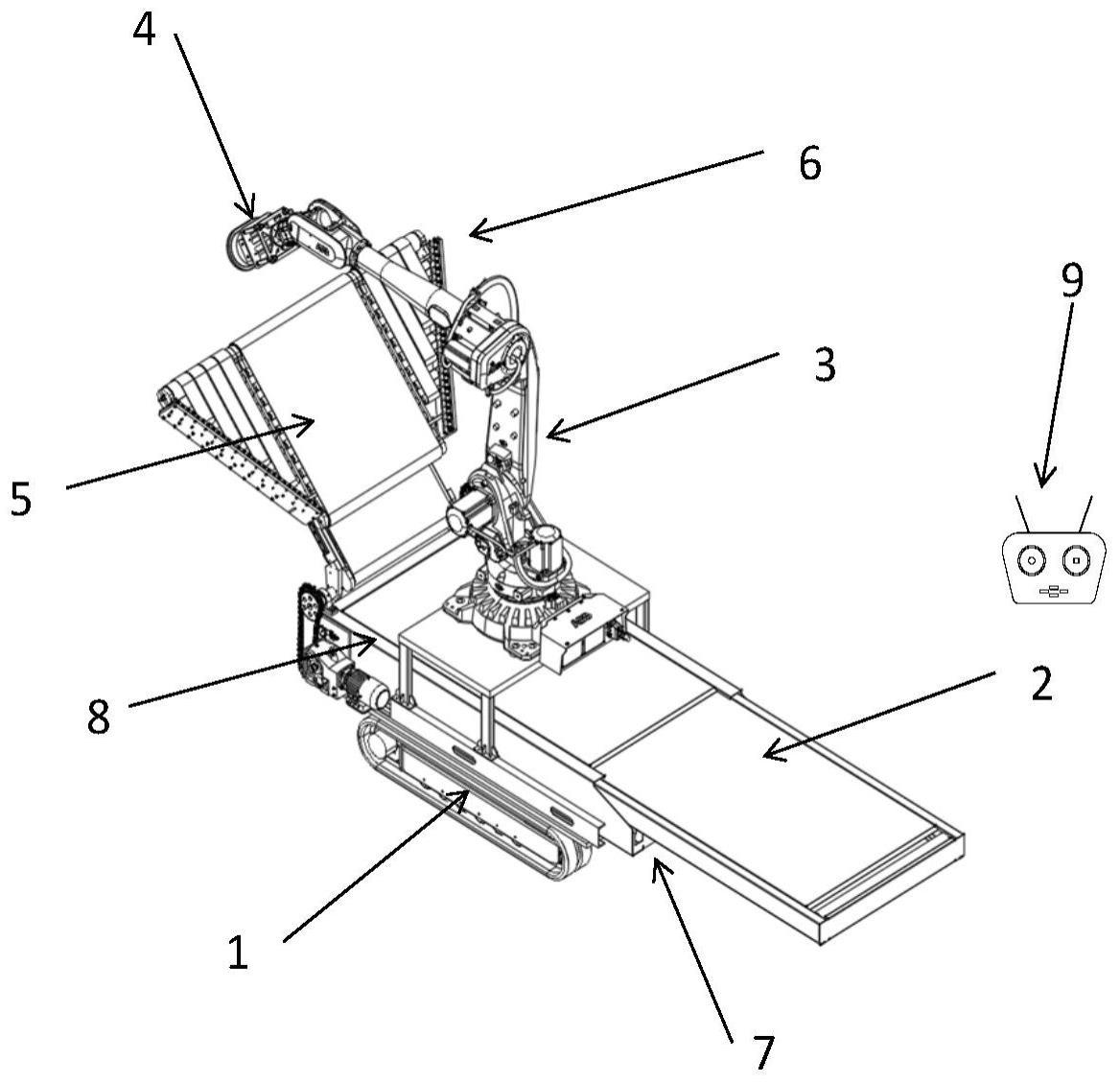
3、一种适用于箱式货运袋装物料的智能卸车机,包括履带行走底盘及动力系统、伸缩输送机构、机器人系统、快换夹具结构、摆臂输送机构、袋包智能视觉识别控制系统、行走引导纠偏系统、电气控制系统和遥控手柄。
4、履带行走底盘及动力系统,包含履带轮、外齿回转支撑以及车架。车架为一体式车架,车架和外齿回转支撑上的外齿圈法兰连接,外齿圈与小齿轮啮合,小齿轮接动力输入,从而使整个车身在外齿回转支撑的调节下实现角度调整或者回转。
5、伸缩输送机构,包括若干级可相对移动的输出带。伸缩输送机构作为卸车机的物料输出部件,其可以在卸车机长度方向上伸缩,以保证卸车机自身可以在较小的空间移动,同时在工作状态时可以适应棚车、货车等不同长度尺寸的工作环境。
6、机器人系统,包含六轴工业机器人、机器人安装座、以及机器人末端配备的快换夹具机构。该快换夹具机构是夹爪取料机构和吸盘取料机构组成的快换结构,可以根据袋包的堆放情况快换抓取目标。
7、摆臂输送机构,包含两级伸缩输送机构,其作为卸车机的物料输入部件。摆臂输送机构整体铰接固定于伸缩输送机构的前端,可以实现整体的上下摆动,配合摆臂输送机构自身长度的伸缩,可以保证其尽可能的靠近袋包物料。
8、袋包智能视觉识别控制系统采用智能视觉算法,精确识别袋包位置和姿态,电气控制系统根据袋包智能视觉识别控制系统的识别结果,控制快换夹具结构取料。
9、行走引导纠偏系统采用复合导引系统并配合rfid射频识别技术,控制带行走底盘及动力系统,实现卸车机的自主导引和实时纠偏。
10、伸缩输送机构和机器人系统安装座均坐于车架上,与车架复合一体。
11、电气控制系统,与履带行走底盘及动力系统、伸缩输送机构、机器人系统、摆臂输送机构、袋包智能视觉识别控制系统、行走引导纠偏系统电气连接,控制卸车机的各部件的运行。
12、遥控手柄,与电气控制系统通信,用于远距离控制装卸机动作。
13、优选的,袋包智能视觉识别控制系统包括设置在机器人末端的左、右摄像机、图像采集处理模块、关节传感器和控制器;控制器包括关节控制器、功率放大器;图像采集处理模块包括反馈运算模块、姿态估计模块、特征检测模块和图像采集模块;关节传感器获取机器人各关节的角度、位移参数并发送给控制器;图像采集模块将摄像机采集的图像传送给特征检测模块,特征检测模块提取图像中整体范围的图像特征信息以及袋包的外形和位置的关键特征信息,然后将特征信息传送至姿态估计模块;姿态估计模块根据上述特征信息估算出机器人末端的精确姿态以及即将抓取袋包的姿态并传输至反馈运算模块;反馈运算模块将机器人末端的目标姿态和目标袋包的姿态及反馈的姿态信息传递至控制器;控制器整合反馈运算模块和关节传感器的反馈信息进行运算得到抓取结构的目标点,并发送指令至机器人及其末端抓取结构。
14、另外,一种适用于箱式货运袋装物料的智能卸车机的作业方法,具体为:
15、s1:卸车机工作前,先保持非工作状态沿车厢中线自动行驶至袋包前方一定距离处。行驶过程中,双履带轮带动整车移动。移动过程中通过双履带的差速动作、回转支撑的回转动作共同配合控制调整车身姿态。
16、s2:袋包的抓取顺序采用自上而下的s形取料顺序。卸车机工作时,先从每个断面的最高处开始卸料。摆臂输送机构朝袋包侧摆动,摆臂输送机构的伸缩输送伸出至最长,此时,摆臂输送系统机构的前端接近袋包垛。袋包智能视觉识别控制系统判定袋包位置后,工业机器人末端工具快换为夹爪取料机构,夹爪从袋包的外露端夹住袋包并拖下堆垛后,夹爪松开袋包进行下一次抓取,同时袋包借自重下落至摆臂输送机构,再通过摆臂输送机构输送至伸缩输送机构,最后从伸缩输送机构输出至下游设备。
17、s3:卸车机沿着自上而下的顺序一直取料,随着袋包的堆垛高度下降到一定高度,摆臂输送机构采取长度和角度共同调节的方式以适应袋包的堆垛高度,完成接料工作。必要时候,卸车机整体也可前后移动以调节摆臂前端距离袋包的距离。整个卸料过程中,卸车机调整状态。
18、s4:当取料到较低处袋包时,摆臂输送机构整体下摆至最低处,夹爪取料机构作业空间和作业方式受到限制。袋包智能视觉识别控制系统判定袋包位置后,工业机器人末端工具快换成吸盘取料机构。吸盘取料机构从袋包的上方抓取袋包后平移拖拽至摆臂输送机构,再通过摆臂输送机构输送至伸缩输送机构,最后从伸缩输送机构输出至下游设备。
19、s5:卸车机完成第一断面袋包取料后,整车在履带轮作用下前进,同时伸缩输送机构伸长以适应下游设备衔接,从而开始第二断面的卸料工作。依此重复,直到完成该方向上的卸料作业。
20、s6:完成一个方向上的卸料作业后,工业机器人缩回,摆臂输送机构缩回并成直立状态,伸缩输送机构缩回,整车回到状态。整车退回至门口,在门口通过两履带轮的差速行驶完成整车的原地180°掉头,进而开始车门另一侧的袋包拆卸作业。
21、本发明的有益效果如下:
22、(1)履带行走底盘及动力系统中行走底盘采用橡胶履带轮,能够适应多种运行环境及复杂路面情况。两个履带轮分别采用伺服电机,通过差速控制两个履带轮,实现整车的前进、后退和转弯。履带轮底盘与车架之间使用回转支撑,可以在行走过程中进一步微调整车角度,使整车对行走空间有更强的适应性。
23、(2)二级或多级伸缩输送机构是在普通的带式输送机的基础上增加了伸缩机构,使得输送机可以在长度方向上自由伸缩,伸缩长度可按要求进行调节。伸缩机皮带在运行时,会发生皮带侧偏,造成皮带磨损,降低设备的使用寿命。
24、(3)袋包智能视觉识别控制系统采用智能视觉算法,环境适应性好,能够精确识别袋包位置和姿态,很好的辅助机载机械设备高效完成袋包装卸车作业。通过左右摄像机和图像采集处理模块,袋包智能视觉识别控制系统能够实现高精度的袋包外形和位置信息提取。这种视觉识别能力可以准确地定位袋包,确保机器人能够准确地抓取袋包,避免误差和损失。另外,特征检测模块能够提取袋包的关键特征信息,根据袋包堆放情况快速切换夹爪取料机构和吸盘取料机构,实现自适应抓取方式。这使得机器人能够根据不同的袋包特性和工作环境进行灵活操作,提高工作效率和成功率。再者,姿态估计模块通过分析特征信息,能够准确估算机器人末端的姿态。这对于机器人的精细控制非常重要,可以确保机器人末端在操作过程中保持正确的姿态,从而避免物料的滑落、碰撞等情况,提高抓取和放置的成功率。最后,反馈运算模块能够将目标姿态和实际反馈的姿态信息传递给控制器。控制器通过整合反馈信息进行运算控制,并发送指令给机器人及其末端抓取结构。这种反馈控制机制能够实时调整机器人的动作,使其更加精确地执行任务,并根据实际情况进行动态调整。该控制方式具有较强的灵活性和适应性,可以根据不同类型的袋包物料进行设置和调整,适用于多种领域的装卸作业,例如仓储、物流、生产线等。同时,通过软件算法的优化和升级,还可以应对更复杂的袋包形态和堆放情况,提高系统的智能化水平。
25、(4)行走引导纠偏系统采用复合导引系统并配合rfid射频识别技术,实现整机的自主导引和实时纠偏。尤其在棚车车厢等狭小空间内,车辆的行走姿态控制是决定卸车机能顺利工作的关键技术点。
26、(5)工业机器人及其末端工具中六轴工业机器人有充分的自由度可以完成各种动作,快换夹具机构由夹爪取料机构和吸盘取料机构组成,可以根据袋包的堆放情况快换抓取目标,抓取可靠、移动灵活,便于智能控制且适应性高。
- 还没有人留言评论。精彩留言会获得点赞!