一种基于轿厢加速度解析的电梯振动故障诊断方法
本发明属于振动故障诊断领域,涉及一种基于轿厢加速度解析的电梯振动故障诊断方法。
背景技术:
1、随着通信技术的发展、传感器应用的大规模普及与各种数据通信平台的开发,如今的电梯运行状况、轿厢视频数据等各种信息能够得到高效、精准的检测、存储和监控。这些新技术的引入不仅为电梯安全管理带来了许多便利,还使得电梯运行的安全性得到了更加全面和细致的保障。电梯作为人们生活中接触最为频繁的特种设备,一旦发生故障很容易引发安全事故。目前电梯故障诊断的方法归纳为以下三类:基于经验知识的诊断方法、基于解析模型的诊断方法、基于数据挖掘的诊断方法。
2、其中,基于经验知识、解析模型的方法不仅需要对被诊断系统有足够的了解,还需要有丰富的故障诊断经验。但电梯系统过于复杂,子系统之间的耦合性很强,且相关领域的诊断经验也较少或者无法复用,因此基于数据驱动的方法更适用于此类非平稳多工况的工作环境。在如今的物联网大数据时代,利用机器学习算法赋能数字孪生智能应用已逐渐成为各行业所研究的热点。
3、轿厢作为电梯运载系统的主体,其加速度信号中又蕴含了极其丰富的设备状态信息,可以反映出电梯的整体运行状态,如正常运行、振动过大以及急停等。对于机器学习模型而言,特征选择非常关键,选择合适的特征可以显著提升模型的准确率与泛化能力等。但在电梯故障诊断中,有些特征不易获取,有些特征又相对稀少,同时还存在一些冗余和噪声特征,这使得特征选择变得尤为困难。
技术实现思路
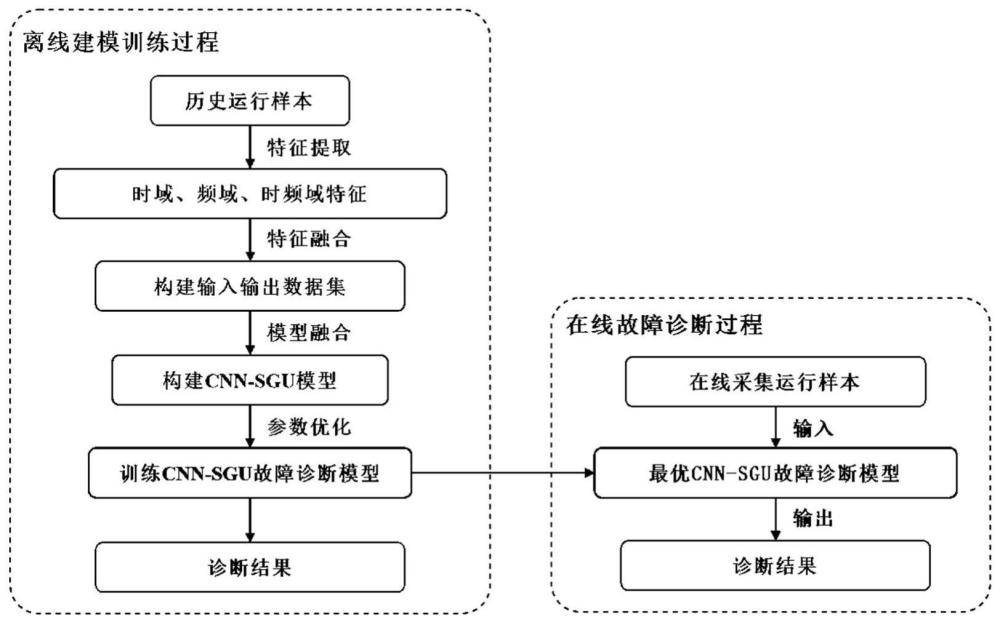
1、为了克服现有技术的不足,本发明提出了一种基于轿厢加速度解析的电梯振动故障诊断方法,首先描述了电梯运行过程及典型振动故障,其次分别从时域、频域及时频域对电梯轿厢振动信号进行特征提取,并在此基础上重构了振动样本的特征向量,最后将与一种单门控单元循环神经网络(single gated unite recurrent neural networks,sgu)卷积神经网络(convolutional neural network,cnn)组合,构建cnn-sgu模型实现了对电梯振动过大故障、急停故障的智能诊断。
2、本发明提供如下的技术方案:
3、一种基于轿厢加速度解析的电梯振动故障诊断方法,所述方法包括以下步骤:
4、第一步:采集原始电梯运行数据并提取原始数据的时频特征,过程如下:
5、步骤(1.1)利用tcp/ip通信协议,远程获取传感器中电梯实时运行数据;
6、其中,传感器与电梯、网关之间均采用串口方式进行连接,并通过modbus和rs485协议进行数据通讯;
7、其中,电梯实时运行数据是指电梯轿厢振动加速度信号;
8、步骤(1.2)通过时域分析法提取电梯轿厢振动加速度信号的故障特征,计算轿厢振动加速度信号的12个时域特征指标;
9、第二步:通过傅里叶变换提取信号的频域特征,过程如下:
10、步骤(2.1)将信号的时域波形借助离散傅里叶变换转化为频谱信息:
11、
12、其中,x(kδt)为振动信号的采样,k为时域离散值的编号,δt为采样间隔,n为采样点数;
13、步骤(2.2)根据步骤(2.1)求得的频谱信息,使用频域统计指标公式计算轿厢加速度信号的13个频域特征指标;
14、第三步:通过小波包分解对信号进行时频域的特征提取,并对所有的特征向量进行重构,过程如下:
15、步骤(3.1)提取轿厢振动加速度信号中的8个时频域特征;
16、步骤(3.2)对多域指标融合与特征向量进行重构;
17、第四步:将cnn网络与sgu网络进行融合,构建一种基于cnn-sgu的电梯故障诊断模型,过程如下:
18、步骤(4.1)将所得的高维数据矩阵vsource输入cnn网络进行特征提取;
19、其中,所用cnn网络由两个卷积模块和两个最大池化层组成,而每个卷积模块具体又包括一个一维卷积和一个elu激活函数,与relu激活函数不同,elu没有神经元死亡的问题,因此使用它来消除梯度消失的困扰,其表达式如下:
20、
21、其中,e为自然对数函数的底数,x′为输入值;
22、步骤(4.2)将输出的数据输入全连接层进行全连接处理,得到大小为32x1的特征向量;
23、其中,全连接层是每一个结点都与上一层的所有结点相连,用来把前面提取到的特征综合起来;
24、步骤(4.3)将全连接层输出数据输入sgu网络进行故障分类;
25、其中,sgu网络是在长短期记忆网络的基础上进行简化,设计了只有一个“门”的新网络,所述sgu网络包括一个前向sgu层和一个后向sgu层。
26、进一步,所述步骤(1.2)的过程如下:
27、步骤(1.2.1)计算振动信号样本中的峰峰值x3,公式如下:
28、x1=max(xi)
29、x2=min(xi)
30、x3=x1-x2
31、其中,xi为振动加速度信号的采样值,max是取数据xi的最大值,min是取数据xi的最小值,x1为信号样本中的最大值,x2为信号样本中的最小值;
32、其中,峰峰值用于描述一个周期内振动信号变化范围的大小,但轿厢振动信号属于非周期性信号,因此用其描述样本中最大值与最小值之间的差值;
33、步骤(1.2.2)计算振动信号样本中的均方根x4,公式如下:
34、
35、其中,n为采样点数,∑为表示求和运算,通常用于数学和统计学中。它表示将一系列数值相加的操作;
36、其中,均方根又称有效值,是机械故障系统中用于判断运转状态是否正常的重要指标,由于均方根的功能是描述振动信号能量的大小,具有稳定性、重复性好的特点,因而当此项指标超出正常值较多时,能判断电梯存在安全隐患或故障;
37、步骤(1.2.3)计算振动信号样本中的裕度因子x5,公式如下:
38、
39、其中|xi|为xi的绝对值;
40、其中,x6为方根幅值:
41、
42、其中,用裕度因子检测机械设备的磨损情况;
43、步骤(1.2.4)计算振动信号样本中的偏度因子x7,公式如下:
44、
45、其中,为xi的平均值;
46、其中,采用偏度因子反映轿厢振动信号的非对称性,当轿厢存在某一方向的摩擦或碰撞时,会造成振动波形的不对称,从而增大其偏度因子;
47、步骤(1.2.5)计算振动信号样本中的峭度因子x8,公式如下:
48、
49、其中,采用峭度因子检测轿厢加速度信号中是否存在冲击;
50、步骤(1.2.6)计算振动信号样本中的平均幅值x9,峰值因子x10,波形因子x11和脉冲因子x12,公式如下:
51、
52、
53、再进一步,所述步骤(2.2)的过程如下:
54、步骤(2.2.1)计算频谱均值指标f1,f1反映频域振动能量的大小:
55、
56、其中,k=1,2,…,k,k是谱线数;
57、步骤(2.2.2)计算频域指标f2,f2为重心频率,能够描述信号在频谱中分量较大的信号成分的频率,因此采用重心频率表示信号功率谱主频带的位置分布:
58、
59、其中,fk是第k条谱线的频率值;
60、其中,还采用指标频率幅值方差f3,频谱边缘比f4,频谱能量比f5来表示信号功率谱主频带的位置分布:
61、
62、其中,频率幅值方差是对轿厢加速度信号中频率和幅值的变化程度进行统计的一种指标;
63、其中,频谱边缘比是一种用来描述轿厢加速度信号频域特性的比率指标,当其值较大时,表示信号的频域特性更加分散和复杂;当其值较小时,表示信号的频域特性更加集中和简单;
64、其中,频谱能量比通过对轿厢加速度信号特定频段的频率成分进行统计,并将其幅度或能量与其他部分相比,得到信号主频带的位置分布;
65、步骤(2.2.3)计算标准差频率f6:
66、
67、其中标准差频率代表的标准差频率则看作是以重心频率为中心的惯性半径,若重心附近的频谱幅值较大,则标准差频率较小,反之亦然;因此标准差频率通常用于描述功率能量分布的分散程度;
68、其中,还采用指标频谱幅值方差f7,频谱幅值偏度f8,频谱集中度f9,频域相似度f10,频谱变异系数f11,频率歪度f12,频率峭度f13描述功率能量分布的分散程度:
69、
70、
71、
72、
73、其中,频谱幅值方差表示轿厢加速度信号在频谱中各个频率分量的幅度变化程度,能够衡量信号在不同频率上的能量分布的变化;
74、其中,频谱幅值偏度反映了轿厢加速度信号在频谱中各个频率分量的幅度相对于频谱均值的偏离程度和方向;
75、其中,频谱集中度能够量化轿厢加速度信号频谱的集中程度,从而帮助分析和理解信号的频谱分布特性;
76、其中,频域相似度通过计算频率fk与f2之间的距离,评估轿厢加速度信号在频域上的分布和集中程度;
77、其中,频谱变异系数越大,表示轿厢加速度信号频谱各频带之间的能量差异越大,频谱变化越剧烈;反之,谱变异系数越小,表示频谱各频带之间的能量差异越小,频谱变化越平缓;
78、其中,频率歪度能够衡量轿厢加速度信号中频率分布的偏斜性,即频谱中高频或低频成分的相对强度;
79、其中,频率峭度能够反映轿厢加速度信号的谐波含量和峰值之间的差异。
80、更进一步,所述步骤(3.1)的过程如下:
81、步骤(3.1.1)采用一种小波包分析理论,将多分辨率分析中没有细分的高频部分进一步分解,并能够根据被分析信号的特征,自适应地选择相应的频带,使之与信号频谱相匹配,其计算公式如下:
82、
83、其中,h、g为滤波器系数,d为小波包分解系数,l、k为分解层数,j、m为小波包节点号;
84、其中,小波包分析在多分辨率分析基础上进行了改进,它将频带进行多层次划分,对每个分解后的频带均进行再次划分,并根据被分析信号的特征选择相应频带,使之与信号频谱相匹配;
85、步骤(3.1.2)根据步骤(3.1.1)分析信号特征后,对采集的振动信号样本进行多层小波包分解,其中,针对分解层数的选取,需要依据实际需求进行确定,如果分解层数过多,会导致子系统的带宽过窄从而影响特征提取的效果,反之则无法精细地对低频及高频信号进行分析,因此对轿厢振动信号进行3层小波包分解;
86、其中,小波包分解第一次分解后得到了两个部分,即高频部分和低频部分,再次分解时对低频和高频两个部分同时进行将半分解,这样,小波包分解每次都得到的是两个序列,依此方法进行三次分解得到8个子信号;
87、其中,由于高通滤波器的存在,会使得每进行一次小波分解,都会发生一次信号“翻转”现象,即信号在低频部分呈由小到大,高频部分呈由大到小排列,如果不解决此问题,在进行特征提取时将会造成子信号排列顺序紊乱,从而不利于观察与分析正常与故障样本的时频域特征;
88、步骤(3.1.3)根据步骤(3.1.2)在每次分解结束后,将该层节点对应频段按从小到大重新排列,在经过以上小波包分解与重排后,依次计算第3层各子信号的能量值,得到振动信号在时频域内的8个特征e1-e8,计算公式如下:
89、
90、其中,n’=1,2…8。
91、所述(3.2)的过程如下:
92、步骤(3.2.1)通过步骤(1.2),步骤(2.2)和步骤(3.1)获取了12个时域指标x1-x12,13个频域指标f1-f13以及8个时频域指标e1-e8,将每个振动样本中的振动信号都重新组合成以上33个指标对应的特征向量,而整个振动样本则视为由若干特征向量构成得到高维数据矩阵:
93、
94、其中,n”表示振动样本总量,表示第k’个振动信号的多域指标构成的特征向量,高维特征数据矩阵sdata的特征维度为33,表示第k’个振动信号对应的12个时域指标,表示第k’个振动信号对应的13个频域指标,则对应第k’个振动信号的8个时频域指标;
95、步骤(3.2.2)将所有振动数据都存储在一个文件中,并对步骤(3.2.1)中的高维数据矩阵进行补充,合并得到整个数据集的高维数据矩阵vsource:
96、vsource=[sdata slabel]
97、其中,slabel为各振动样本对应的7种数据标签:正常振动、启动区振动、加速区振动、匀速区振动、减速区振动、停止区振动以及急停振动。
98、所述步骤(4.1)的过程如下:
99、步骤(4.1.1)将高维数据矩阵vsource输入cnn网络中的第一个卷积模块进行特征提取,输出大小为16x16的特征向量;
100、其中,第一个卷积模块包括一个卷积层和一个池化层;
101、其中,上述卷积层的卷积核大小为2x1、卷积核移动的步长为1、通道数为16,池化层的卷积核大小为2x1;
102、其中,卷积是通过将一个在空间上移动的小型卷积核应用于输入数据,从而实现特征提取的操作;
103、其中,卷积核是一个指定大小的向量,它包含了一组权重,这些权重会与输入信号的每一个元素相乘,并对这些积进行求和,得到输出信号中对应的元素;
104、步骤(4.1.2)将步骤(4.1.1)得到的数据输入cnn网络中的第二个卷积模块进行二次特征提取,输出大小为4x8的特征向量;
105、其中,第二个卷积模块包括一个卷积层和一个池化层;
106、其中,上述卷积层的卷积核大小为3x1,卷积核移动的步长为2,通道数为8;
107、其中,最大池化(max pool)即取局部接受域中值最大的点,用于在卷积神经网络(cnn)中减少输入数据的空间大小,从而降低模型的复杂度,并增强模型对平移或旋转不变性的能力。最大池化max pool卷积核的大小是2*1。
108、所述步骤(4.3)的过程如下:
109、步骤(4.3.1)将步骤(4.2)的特征提取结果作为sgu的输入;
110、步骤(4.3.2)首先输入数据经过前向sgu层,得到门控信息ct-1后,将前一时刻的输出ht-1与当前时刻的输入zt进行拼接,经过tanh激活函数缩放到-1到1之间,计算公式如下:
111、
112、其中,表示t时刻的候选存储器,tanh为双曲正切函数,wc为权重矩阵,bc表示误差向量;
113、步骤(4.3.3)更新记忆状态ct,将前一时刻记忆状态ct-1和步骤(4.3.2)拼接的数据输入到σ激活函数缩放到-1到1之间,计算公式如下:
114、
115、gt=σ(wg·[ht-1,xt,ct-1]+bg)
116、其中,wg代表权重矩阵,bg代表误差向量,σ代表sigmoid激活函数;
117、步骤(4.3.4)最后根据更新后的记忆状态输出结果ht,计算公式如下:
118、ht=tanh(ct)
119、其中,ht表示t时刻的输出;
120、步骤(4.3.5)按照步骤(4.3.2-4.3.4)将输入数据输入反向sgu层进行计算;
121、其中,反向sgu与前向sgu的结构和计算过程都相同;
122、步骤(4.3.6)将前向sgu和反向sgu的输出数据进行拼接,通过softmax进行归一化处理得到sgu的最终分类结果;
123、其中,softmax是一种常见的归一化函数,用来将多个神经元的输出映射到(0,1)区间内,表示它们的概率。
124、本发明的有益效果主要表现在:(1)对采集的轿厢加速度数据进行分析处理的基础上,进行了故障样本的多域特征提取和融合,多域特征比单域特征具有更丰富的特征信息,有助于提高分类精度;(2)提出了一种新的机器学习分类算法对其进行故障智能诊断,该方法通过融合卷积神经网络(cnn)与单门控单元循环神经网络(sgu),在对输入特征进行局部相关性与自相关性进行挖掘的基础上实现了对电梯正常运行、振动过大故障以及急停故障的实时诊断;(3)多域指标融合方法与cnn-sgu故障诊断模型在电梯故障诊断方面具有显著优势,并为相关工作人员提供有效的告警信息,切实保障电梯的安全运行。
- 还没有人留言评论。精彩留言会获得点赞!