一种电梯集中上下货的控制方法及装置与流程
【】本技术涉及电梯,尤其涉及一种电梯集中上下货的控制方法及装置。
背景技术
0、
背景技术:
1、随着工业的推进,越来越多的工厂升级改造为具有自动化作业功能的现代化厂房,而随着自动化进程的推进,运输货物的货梯也随之与工业自动化设备实现联动,实现货物运输的全自动,在升级改造的过程中,不同楼层间的对电梯的使用优先级的管理,已然成为自动控制中最关键的一环。
2、中国专利cn111634766b中的乘梯调度方法,其方法根据电梯状态信息和呼梯状态信息获取在当前时刻对各电梯的占用情况和呼梯情况,然后再获取各智能移动设备对各电梯的呼梯优先级,仲裁得到各智能移动设备在当前时刻对于各电梯的呼梯竞争结果,使得所述智能移动设备进入等待乘梯状态或等待呼梯状态,以提升智能移动设备的乘梯效率,且提高智能移动设备乘梯成功率。
3、上述专利针对于各电梯的占用情况进行仲裁得出呼梯竞争结果,从而提升智能移动设备的乘梯效率,然而,该方法的竞争主要是针对于单次的运行竞争,在自动化工厂中,在电梯的高峰运行调度过程中,其使用并不是很合理,且现有其他的电梯高峰运行调度方法,是通过提前预设定高峰时段,在该高峰时段内通过呼梯采集系统采集到的呼梯楼层,自动调度电梯按一定的顺序运行。但在智能工厂的应用场景中,集中上下货的时间是不确定的,则无法按照现有的电梯高峰运行调度方法来定义一个高峰时间,故无法按照其逻辑运算出具体高峰运行策略。
技术实现思路
0、
技术实现要素:
1、为了解决现有的自动化工厂的电梯在高峰运行调度过程中,由于集中上下货的时间的不确定性,导致无法按照现有的电梯高峰运行调度方法来定义一个高峰时间,故无法按照其逻辑运算出具体高峰运行策略。本发明通过获取目标楼层的集中上下货指令及货物的起始楼层信息,以此来控制起始楼层的机器人将货物运输到轿厢内离开轿厢,当机器人离开轿厢后,控制电梯从起始楼层运行至目标楼层,再控制目标楼层的机器人将货物从轿厢中搬出,最后确定继续执行或退出所述集中上下货指令。
2、本发明提出了如下方案:
3、一种电梯集中上下货的控制方法,包括:
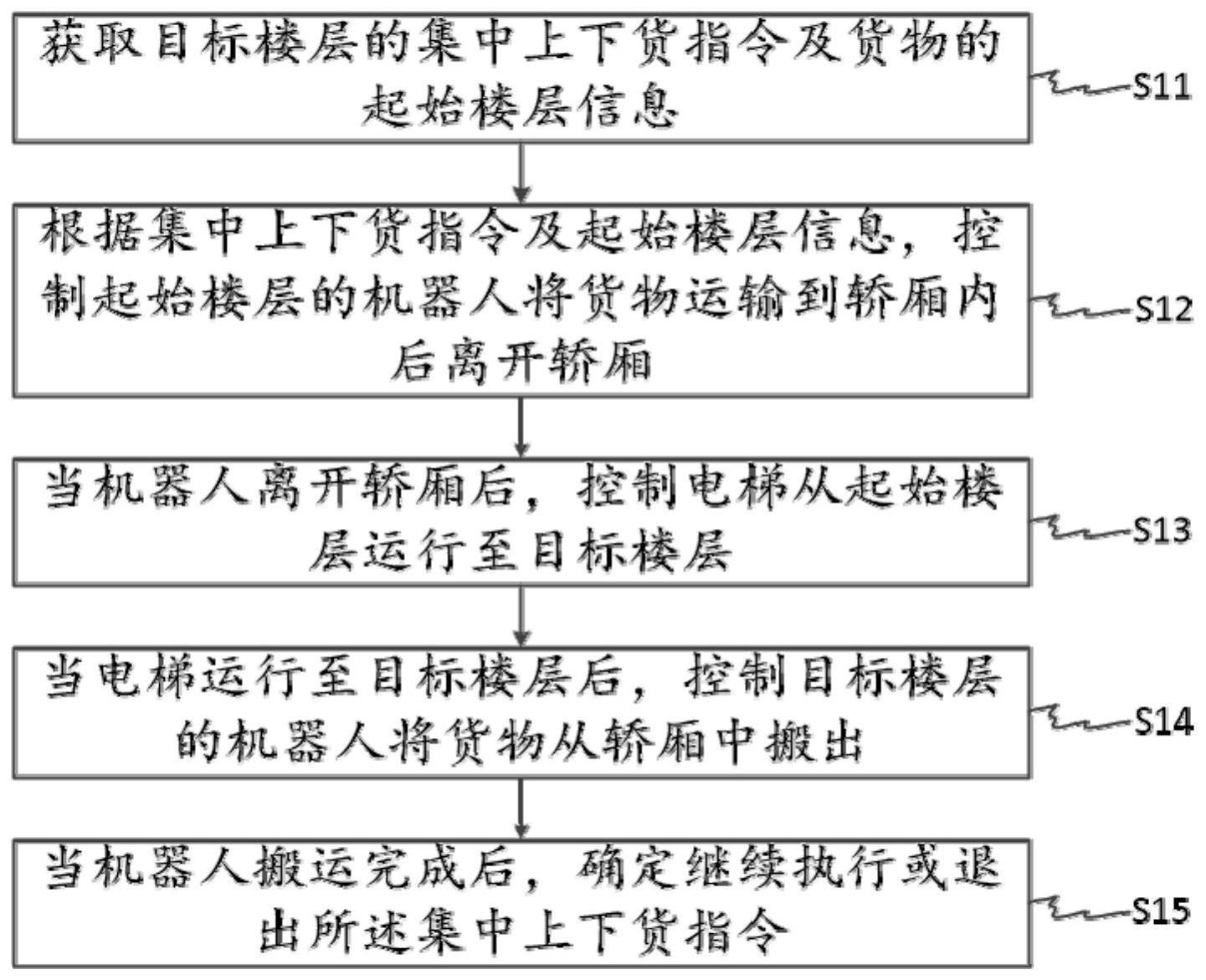
4、获取目标楼层的集中上下货指令及货物的起始楼层信息;
5、根据集中上下货指令及起始楼层信息,控制起始楼层的机器人将货物运输到轿厢内后离开轿厢;
6、当机器人离开轿厢后,控制电梯从起始楼层运行至目标楼层;
7、当电梯运行至目标楼层后,控制目标楼层的机器人将货物从轿厢中搬出;
8、当机器人搬运完成后,确定继续执行或退出所述集中上下货指令。
9、如上所述的控制方法,所述获取目标楼层的集中上下货指令及货物的起始楼层信息的步骤,包括:
10、获取各楼层的电梯智能控制单元的优先级;
11、根据优先级,接收优先级最高的目标楼层发出的集中上下货指令;
12、根据集中上下货指令,控制智能控制单元下发货物起始楼层呼梯指令;
13、根据集中上下货指令和货物起始楼层呼梯指令,确定电梯抵达货物所在的起始楼层。
14、如上所述的控制方法,所述根据集中上下货指令及起始楼层信息,控制起始楼层的机器人将货物运输到轿厢内后离开轿厢的步骤,包括:
15、根据集中上下货指令及起始楼层信息,获取电梯轿门的开合状态;
16、当电梯轿门处于开启状态后,调度起始楼层中空闲的物流机器人运输货物到轿厢中;
17、当货物完全进入轿厢后,控制物流机器人离开所述轿厢。
18、如上所述的控制方法,所述当机器人离开轿厢后,控制电梯从起始楼层运行至目标楼层的步骤,包括:
19、当机器人离开轿厢后,控制轿门关闭,确定发出集中上下货指令的目标楼层;
20、控制电梯运行至目标楼层。
21、如上所述的控制方法,所述当机器人搬运完成后,确定继续执行或退出所述集中上下货指令的步骤,包括:
22、当机器人搬运完成后,判断集中上下货指令是否退出;
23、若集中上下货指令未退出,继续执行下一次的货物运输任务;
24、若集中上下货指令退出,等待下一个集中上下货指令。
25、如上所述的控制方法,所述判断集中上下货指令是否退出的方法,具体为:
26、获取集中上下货指令中的集中运行次数以及集中运行时间;
27、根据货物起始楼层信息以及目标楼层信息,确定剩余的集中运行次数以及剩余的集中运行时间;
28、若所述集中运行次数以及集中运行时间均为零,判断集中上下货指令退出。
29、一种电梯集中上下货的控制装置,包括:
30、获取模块,用于获取目标楼层的集中上下货指令及货物的起始楼层信息;
31、第一控制模块,用于根据集中上下货指令及起始楼层信息,控制起始楼层的机器人将货物运输到轿厢内后离开轿厢;
32、第二控制模块,用于当机器人离开轿厢后,控制电梯从起始楼层运行至目标楼层;
33、第三控制模块,用于当电梯运行至目标楼层后,控制目标楼层的机器人将货物从轿厢中搬出;
34、确定模块,用于当机器人搬运完成后,确定继续执行或退出所述集中上下货指令。
35、如上所述的控制装置,所述获取模块包括:
36、第一获取单元,用于获取各楼层的电梯智能控制单元的优先级;
37、接收单元,用于根据优先级,接收优先级最高的目标楼层发出的集中上下货指令;
38、第一控制单元,用于根据集中上下货指令,控制智能控制单元下发货物起始楼层呼梯指令;
39、第一确定单元,用于根据集中上下货指令和货物起始楼层呼梯指令,确定电梯抵达货物所在的起始楼层;
40、所述第一控制模块包括:
41、第二获取单元,用于根据集中上下货指令及起始楼层信息,获取电梯轿门的开合状态;
42、调度单元,用于当电梯轿门处于开启状态后,调度起始楼层中空闲的物流机器人运输货物到轿厢中;
43、第二控制单元,用于当货物完全进入轿厢后,控制物流机器人离开所述轿厢;
44、所述第二控制模块包括:
45、第二确定单元,用于当机器人离开轿厢后,控制轿门关闭,确定发出集中上下货指令的目标楼层;
46、第三控制单元,用于控制电梯运行至目标楼层;
47、所述确定模块包括:
48、判断单元,用于当机器人搬运完成后,判断集中上下货指令是否退出;
49、执行单元,用于若集中上下货指令未退出,继续执行下一次的货物运输任务;
50、等待单元,用于若集中上下货指令退出,等待下一个集中上下货指令;
51、所述判断单元包括:
52、获取子单元,用于获取集中上下货指令中的集中运行次数以及集中运行时间;
53、确定子单元,用于根据货物起始楼层信息以及目标楼层信息,确定剩余的集中运行次数以及剩余的集中运行时间;
54、判断子单元,用于若所述集中运行次数以及集中运行时间均为零,判断集中上下货指令退出。
55、一种计算机可读存储介质,所述存储介质上存储有计算机程序,当所述计算机程序被电梯集中上下货的控制装置执行时,实现如上所述的电梯集中上下货的控制方法。
56、一种计算机设备,该计算机设备包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其中,处理器执行所述计算机程序时实现如上所述的电梯集中上下货的控制方法。
57、本发明实施例通过获取目标楼层的集中上下货指令及货物的起始楼层信息,以此来控制起始楼层的机器人将货物运输到轿厢内离开轿厢,当机器人离开轿厢后,控制电梯从起始楼层运行至目标楼层,再控制目标楼层的机器人将货物从轿厢中搬出,最后确定继续执行或退出所述集中上下货指令,其实现原理简单,实现方式高效经济,具有较高的灵活性,能够使电梯在运行高峰期间更好地进行调度,确定出具体的高峰运行策略。
- 还没有人留言评论。精彩留言会获得点赞!