一种起重机决策规划方法及系统与流程
本技术属于起重机,涉及一种起重机决策规划方法及系统。
背景技术:
1、近年来,机器作业的无人化已成为工业界的研究热点。各类工业机器人及自动化机械为社会生产力带来了巨大提高。起重机能够在建筑和设施的建造和维护时在材料的运输过程中起到重要的作用。项目的效率与项目实施过程的安全性的关键在于起重机的稳定运行。
2、然而,现有的技术中,起重机吊装规划大多基于数学和机器人技术。现有技术专利号为cn202111472533.6,名称为“一种桥式起重机三维路径规划方法”的文件公开了一种桥式起重机三维路径规划方法,包括:对桥式起重机的工作环境信息通过信号采集处理单元进行采集与处理;将环境信息生成立体栅格地图,将障碍物和无障碍物栅格用不同颜色标识出;根据所述立体栅格地图,采用三维算法搜索出最优路径;采用插值法对生成的运行路径进行优化。该发明虽然具有节省时间和能量及提高桥式起重机工作效率等优点。
3、虽然现有技术规划了起重机行走路径,提高了效率,但是目前面对突发的障碍物缺少一种应急地执行作业工作的系统及方法。
技术实现思路
1、为了对披露的实施例的一些方面有基本的理解,下面给出了简单的概括。所述概括不是泛泛评述,也不是要确定关键/重要组成元素或描绘这些实施例的保护范围,而是作为后面的详细说明的序言。
2、为了解决相关技术中存在的问题,本公开实施例提供了起重机决策规划系统,用以解决现有技术中的受天气因素影响大而导致车位推荐精度不高的问题。
3、在一些实施例中,提供了一种起重机决策规划系统,所述方法包括:
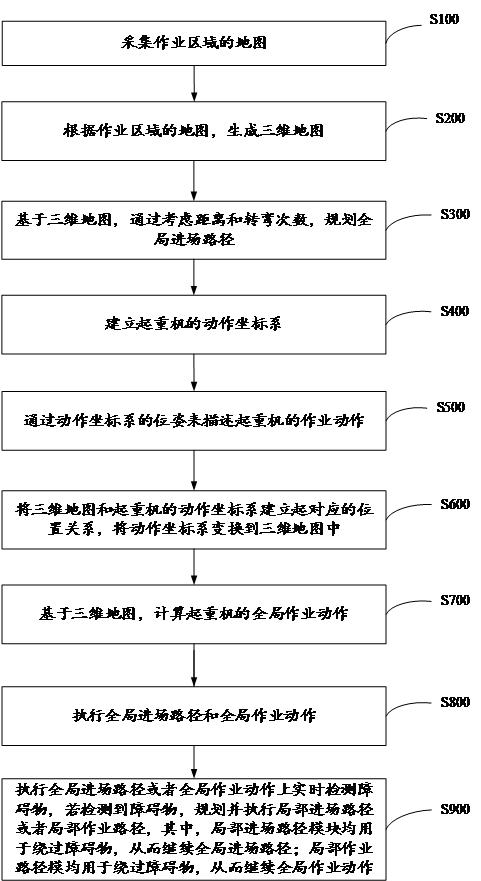
4、采集作业区域的地图;
5、根据作业区域的地图,生成三维地图;
6、基于三维地图,通过考虑距离和转弯次数,规划全局进场路径;
7、建立起重机的动作坐标系;
8、通过动作坐标系的位姿来描述起重机的作业动作;
9、将三维地图和起重机的动作坐标系建立起对应的位置关系,将动作坐标系变换到三维地图中;
10、基于三维地图,计算起重机的全局作业动作;
11、执行全局进场路径和全局作业动作;
12、执行全局进场路径或者全局作业动作上实时检测障碍物,若检测到障碍物,规划并执行局部进场路径或者局部作业动作,其中,局部进场路径均用于绕过障碍物,从而继续全局进场路径;局部作业动作均用于绕过障碍物,从而继续全局作业动作。
13、优选的,通过动作坐标系的位姿来描述起重机的作业动作,包括:
14、以变幅角θ、横回转角σ和吊索长度r作为三个维度的变量,分别对应起重机的变幅、回转、升降这三种运动形式。
15、优选的,计算起重机的作业动作,包括:依据最优作业动作距离、最优时间和最优切换次数,计算起重机的多策略融合最优作业动作规划。
16、优选的,最优作业动作距离的代价函数为,被配置为
17、g(n)=g(n-1)+δg(n,n-1),初始g(0)=0;
18、作业距离:δg(n,n-1)=(x(n)-x(n-1))^2+(y(n)-y(n-1))^2+(z(n)-z(n-1))^2;
19、h(n)=β*((x(n)-x(g))^2+(y(n)-y(g))^2+(z(n)-z(n-1))^2);
20、n表示当前节点,f(n)为当前f的累加值,表示从起始点到目标点在经过当前点的情况下的预估代价,g(n)为当前g的累加值,表示当前节点与起始节点之间的移动代价,以变幅角θ、横回转角σ和吊索长度r作为三个维度的变量,分别对应起重机的变幅、回转、升降这三种运动形式;
21、每个维度的space空间与笛卡尔空间坐标转换如下公式:
22、上述g(n),h(n)公式中,对应的x,y,z,为每个维度节点对应的空间坐标;
23、h(n)为当前h的累加值,表示从当前点到目标点的预估代价;
24、计算每个栅格到目标栅格的直线距离,地图中一共有n个点,n为对应的栅格索引点,g为目标栅格索引点,x,y分别对应每个栅格点的横纵向坐标,计算每个栅格的启发函数值;
25、根据每个计算节点的实际代价和预估代价之和作为评价指标选择出最优的路径下个应该计算的节点,直至运算至终点,将所有的父节点连接起来,作为最优作业动作距离。
26、优选的,最优时间的计算包括:
27、时间最优作业规划的代价函数为,被配置为
28、
29、g(n)=g(n-1)+δg(n,n-1)
30、n表示当前节点,f(n)为当前f的累加值,f(n)表示从起始点到目标点在经过当前点的情况下的预估代价;
31、初始g(0)=0;作业距离:δg(n,n-1)=
32、g(n)为当前g的累加值,表示当前节点与起始节点之间的时间代价,为起始节点到达当前节点所需时间之和;由之前节点依次递推相加求得;
33、
34、其中、、分别表示进行作业时变幅角的变化、横摆角的变化、吊索长度的变化,、、分别表示起重机在变幅、横摆、拉升吊索时的运行速度;表示从节点n-1到节点n运行所消耗的时间;根据实际吊车运行情况,设置比例系数,,,分别为每个节点对应维度的单步间距值;
35、;
36、h(n)为当前h的累加值,表示从当前点到目标点的预估代价,由于无法判断出切换动作的次数,则使用目标点到终点的稳定运行时间表示;
37、将空间坐标转换为三个维度的栅格坐标,根据不同起重机三个维度,旋转、变幅、起落的单位时间运行消耗比例关系设置系数scal_a、scal_b、scal_c,计算每个栅格的启发函数。
38、优选的,最优切换次数的计算,包括:
39、切换次数最优作业规划的代价函数为,
40、
41、,初始;
42、δg(n,n-1)=(phi(n)-phi(n-1))+(sita(n)-sita(n-1))+(lr(n)-lr(n-1));
43、h(n)=β*(sign(phi(n)-phi(g))+sign(sita(n)-sita(g))+sign(lr(n)-lr(g)));
44、n表示当前节点,f(n)为当前f的累加值,表示从起始点到目标点在经过当前点的情况下的预估代价;
45、g(n)为当前g的累加值,表示当前节点与起始节点之间的移动代价,为起始节点到达当前节点时所需回转、变幅、起落对应的移动代价之和;
46、phi(n),sita(n),lr(n)为对应三个维度的栅格索引值,phi(g),sita(g),lr(g)为对应的三个维度的目标栅格索引值,为了确保解收敛,在代价函数计算中设置β<1的乘数;
47、作业切换次数:根据三个维度的栅格坐标,计算每个栅格的切换值,每个维度计算切换次数取0和1,每个维度当前栅格n与目标栅格g相等取0,不相等取1。
48、优选的,所述方法还包括:依据最优的起重机展臂收臂过渡策略,来计算起重机的多策略融合最优作业动作规划,其中,最优的起重机展臂收臂过渡策略为,计算每种作业场景的伸展度,不同的伸展度对起重机作业时间和磨损程度不同,根据计算的伸展度加权到作业切换次数与作业时间最优上。
49、优选的,最优的起重机展臂收臂过渡策略计算,包括:
50、伸展度m=f(jib,sita,lr),臂长jib,幅度sita,吊钩长度lr,设定基准臂长幅度吊钩长度jib、sita、lr,综合计算每种作业场景的伸展度,不同的伸展度对起重机作业时间和磨损程度不同,根据计算的伸展度加权到作业切换次数与作业时间最优上;
51、
52、g(n)由当前g值累加:;
53、δg(n,n-1)=(phi(n)-phi(n-1))+(sita(n)-sita(n-1))+(lr(n)-lr(n-1));
54、
55、计算的总代价f(n)公式如上,添加了一项含伸展度m的公式, m(n)为伸展度,n为对应的栅格变量;伸展度m=f(jib,sita,lr)根据三个维度的基准值计算得,伸展度的三个维度为臂长维度,变幅维度,吊钩升降维度;
56、根据吊车展开形式的判断,臂长和吊钩加权系数为比例形式,幅度维度加权系数为指数形式;其中,综合实验仿真效果与实际调试场景,伸展度的累加计算为计算单步长g(n)增长的变动量,设置伸展度的加权系数,臂长系数、吊钩系数和幅度系数。
57、优选的,计算起重机的多策略融合最优作业动作规划,包括:
58、多策略融合作业规划所述代价函数:
59、g(n)由当前g值累加:
60、按作业时间,作业切换次数,作业距离设置惩罚函数权值,根据侧重点不同,得到不同的融合策略;
61、heuristic函数是启发式函数,用于估算当前节点到终点的代价,current_node.g表示当前节点到起点的实际代价,cost函数用于计算当前节点与其邻居节点之间的综合代价值。
62、优选的,所述方法,还包括:
63、根据三维地图,提取二维的路面投影图;
64、根据二维的路面投影图,通过考虑距离和转弯次数,规划进场路径。
65、优选的,采集作业区域的地图为通过无人机倾斜摄影技术采集。
66、在一些实施例中,公开了一种起重机决策规划系统,所述系统,包括:后台远端系统和起重机端系统;
67、所述后台远端系统,包括:
68、5g通信模块,被配置为连通起重机与远程遥控模块,实现起重机与远程的通信;
69、远程遥控模块,被配置为紧急情况下,远程接管控制起重机;
70、io模块,被配置为通过前端界面生成的地图,确定路径计算模块的输入输出接口;
71、地图处理模块,被配置为处理真实采集的数据为网格地图,在网格地图中计算路径;
72、全局路径计算模块,被配置为通过地图处理模块的输入、起重机进场起点和终点,计算生成全局进场路径;
73、全局动作计算模块,被配置为,计算生成作业时的全局作业动作;
74、所述起重机端系统,包括:
75、激光雷达,用于识别周围的障碍物及吊装物;
76、处理器模块,被配置为集成调度,完成整个起重机吊装流程。
77、感知计算模块,被配置为接收激光雷达信息输入,实时感知周围的障碍物及吊装物,并计算位置;
78、局部进场路径模块,被配置为接收全局进场路径及感知信息,更新生成局部无碰撞的进场路径;
79、局部作业动作块模块,被配置为接收全局作业动作,更新生成局部无碰撞的作业动作;
80、网络通信模块,被配置为将起重机上的处理器和定位模块连通成局域网;
81、定位模块,被配置为实时接收起重机gps数据,计算起重机当前准确位置,为后续局部进场路径起点作参考。
82、本公开实施例提供的一种起重机决策规划系统,包括后台远端系统和起重机端系统,在后台远端系统通过生成的三维地图同时规划起重机的全局进场路径和全局作业动作,在起重机端系统实时检测被遗漏的障碍物,若检测到障碍物则临时执行局部进场路径或者局部作业动作。这样,面对突发的障碍物或者三维地图没有监测到障碍物,可以更加合理地规避障碍物,进而减少碰撞的风险。
83、以上的总体描述和下文中的描述仅是示例性和解释性的,不用于限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!