一种举升机控制方法、系统、智能终端及存储介质与流程
本技术涉及举升机技术的领域,尤其是涉及一种举升机控制方法、系统、智能终端及存储介质。
背景技术:
1、举升机是一种用于汽车维修行业的汽车修理机械,包括地藏式举升机、移动举升机等。
2、相关技术中,移动举升机常用于汽车修理厂中,移动举升机包括举升台和两个独立安装在举升台下方的举升机构,在将汽车配件放置于移动举升机的举升台上后,移动举升机根据地面上的轨迹移动至目的地,再控制两个独立的举升机构将汽车配件举升至指定高度,从而完成汽车配件的运输。
3、针对上述中的相关技术,将汽车配件放置在举升台上时,汽车配件的重量往往不能均匀分配至举升台对应两个独立举升机构的位置上,从而在两个举升机构同时举升汽车配件时,使造成受力较多的举升机构的举升高度低,而受力较少的举升机构的举升高度高,容易造成汽车配件从举升机上掉落,导致举升机举升汽车配件时的稳定性低,还有改进的空间。
技术实现思路
1、为了提高举升机举升汽车配件时的稳定性,本技术提供一种举升机控制方法、系统、智能终端及存储介质。
2、第一方面,本技术提供一种举升机控制方法,采用如下的技术方案:
3、一种举升机控制方法,包括:
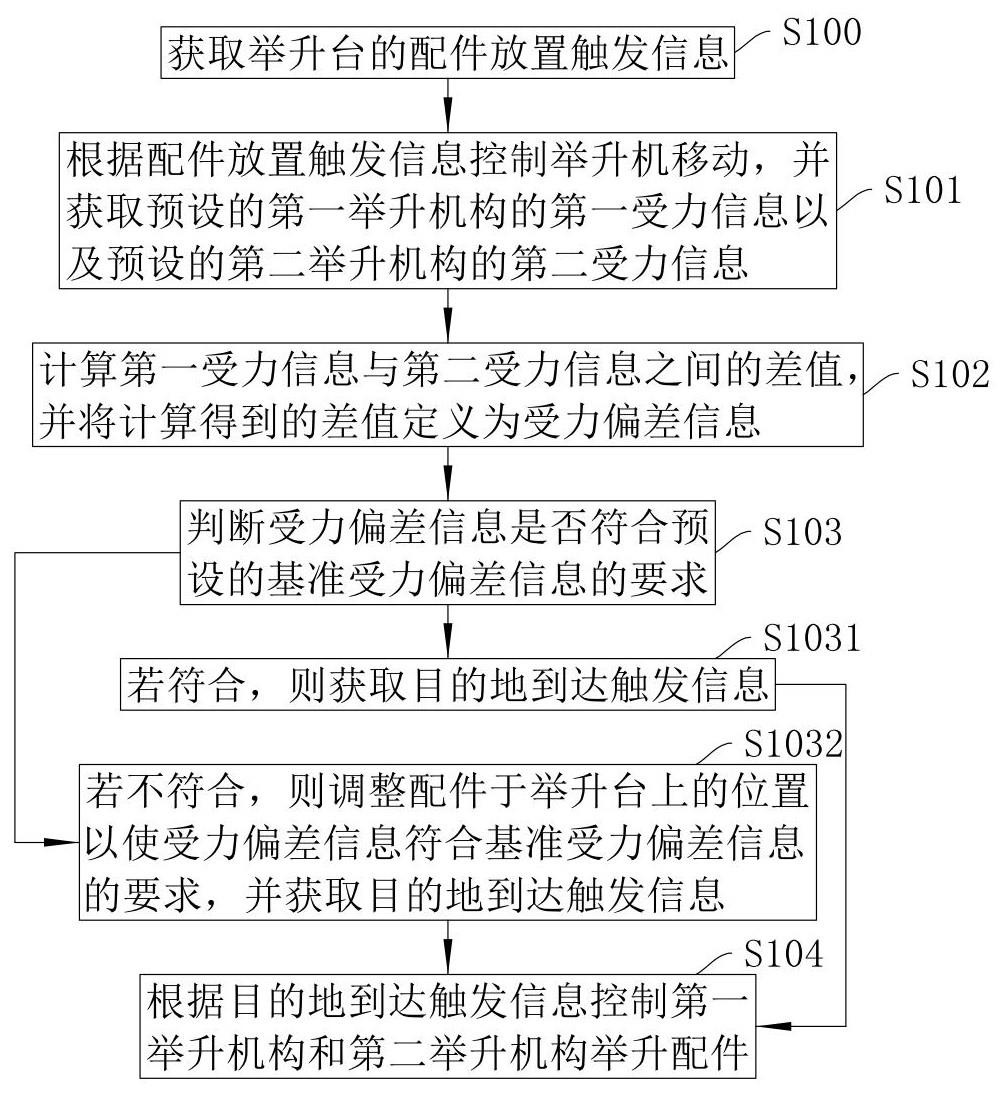
4、获取举升台的配件放置触发信息;
5、根据配件放置触发信息控制举升机移动,并获取预设的第一举升机构的第一受力信息以及预设的第二举升机构的第二受力信息;
6、计算第一受力信息与第二受力信息之间的差值,并将计算得到的差值定义为受力偏差信息;
7、判断受力偏差信息是否符合预设的基准受力偏差信息的要求;
8、若符合,则获取目的地到达触发信息;
9、若不符合,则调整配件于举升台上的位置以使受力偏差信息符合基准受力偏差信息的要求,并获取目的地到达触发信息;
10、根据目的地到达触发信息控制第一举升机构和第二举升机构举升配件。
11、通过采用上述技术方案,在配件放置在举升机的举升台,即检测到配件放置触发信息时,控制举升机移动,并检测第一举升机构的第一受力信息和第二举升机构的第二受力信息,计算第一受力信息与第二受力信息之间的差得到受力偏差信息,将受力偏差信息与基准受力偏差信息进行对比,在受力偏差信息不符合基准受力偏差信息的要求时,说明配件对第一举升机构和第二举升机构的压力不均匀,容易造成在相同功率下,举升的高度不同,因此调整配件于举升台上的位置,以使受力偏差信息符合基准受力偏差信息的要求,在检测到目的地到达触发信息,即举升机移动至目的地后,控制第一举升机构和第二举升机构举升配件,进而提高举升机举升配件时的稳定性。
12、可选的,调整配件于举升台上的位置的方法包括:
13、获取配件质量信息;
14、判断配件质量信息是否符合预设的配件同步举升信息的要求;
15、若符合,则控制第一举升机构和第二举升机构待机,并获取目的地到达触发信息;
16、若不符合,则获取位置调整方式信息;
17、根据位置调整方式信息调整配件于举升台上的位置。
18、通过采用上述技术方案,对配件质量信息进行检测,并将配件质量信息与配件同步举升信息进行对比,在配件质量信息不符合配件同步举升信息的要求,即配件质量较重时,检测位置调整方式信息,根据位置调整方式信息调整配件于举升台上的位置,进而提高调整配件于举升台上位置的方便性。
19、可选的,所述位置调整方式信息包括举升机构调整信息,根据举升机构调整信息调整配件于举升台上的位置的方法包括:
20、于配件质量信息不符合配件同步举升信息的要求时,控制举升机停止移动,并根据受力偏差信息进行分析,以确定调整举升机构和待机举升机构;
21、获取调整举升机构的未调整高度信息;
22、控制待机举升机构待机,并控制调整举升机构以预设的调整举升功率信息和预设的调整频率信息举升,同时获取配件滑移触发信息;
23、根据配件滑移触发信息控制调整举升机构待机,并获取调整举升机构和待机举升机构的第一受力偏差改变信息;
24、于第一受力偏差改变信息符合基准受力偏差信息的要求时,控制调整举升机构以预设的调整下降功率信息下降,并获取调整举升机构的调整高度信息;
25、判断调整高度信息是否符合未调整高度信息的要求;
26、若不符合,则控制调整举升机构继续以调整功率信息下降;
27、若符合,则控制调整举升机构待机。
28、通过采用上述技术方案,在配件质量信息不符合配件同步举升信息的要求时,控制举升机停止移动,并根据受力偏差信息确定调整举升机构和待机举升机构,从而检测调整举升机构未调整时的未调整高度信息,控制待机举升机构待机,并控制调整举升机构以调整举升功率信息和调整频率信息举升配件,使调整举升机构于待机举升机构之前形成倾斜的坡度,从而使配件从调整举升机构一侧滑移向待机举升机构,即检测配件滑移触发信息,在检测到配件滑移触发信息时,控制调整举升机构待机,使配件持续从调整举升机构一侧滑移向待机举升机构,并检测第一受力偏差改变信息,在第一受力偏差改变信息符合基准受力偏差信息的要求时,控制调整举升机构下降至未调整高度信息,进而提高配件于举升台上位置调整的方便性。
29、可选的,所述位置调整方式信息包括举升机调整信息,根据举升机调整信息调整配件于举升台上的位置的方法包括:
30、获取举升机的移动方向信息;
31、根据移动方向信息进行分析,以确定在前举升机构和在后举升机构;
32、根据受力偏差信息进行分析,以确定在前举升机构偏重信息或在后举升机构偏重信息;
33、若确定在后举升机构偏重信息,则控制举升机调整配件于举升台上的位置;
34、若确定在前举升机构偏重信息,则控制举升机沿移动方向信息以预设的前进功率信息和预设的突进频率信息突进,并获取在前举升机构和在后举升机构的第二受力偏差改变信息;
35、判断第二受力偏差改变信息是否符合基准受力偏差信息的要求;
36、若符合,则控制举升机沿移动方向信息移动;
37、若不符合,则继续控制举升机沿移动方向信息以前进功率信息和突进频率信息突进,直至第二受力偏差改变信息符合基准受力偏差信息的要求。
38、通过采用上述技术方案,对举升机的移动方向信息进行检测,从而根据移动方向信息确定在前举升机构和在后举升机构,并根据受力偏差信息确定在前举升机构偏重信息或在后举升机构偏重信息,确定在后举升机构偏重信息后,控制举升机对配件的位置调整;确定在前举升机构偏重信息时,控制举升机沿移动方向信息以前进功率信息和突进频率信息突进,从而使配件在惯性作用下由在前举升机构滑移向在后举升机构,并对滑移后在前举升机构和在后举升机构的第二受力偏差改变信息进行检测,在第二受力偏差改变信息不符合基准受力偏差信息的要求时,控制举升机再次突进,进而提高配件于举升台上位置调整的方便性。
39、可选的,于确定在后举升机构偏重信息时,控制举升机调整配件于举升台上的位置的方法包括:
40、根据移动方向信息以确定举升机的后退方向信息;
41、控制举升机沿后退方向信息以预设的后退功率信息和预设的后退频率信息后退,并获取在前举升机构和在后举升机构的第三受力偏差改变信息;
42、判断第三受力偏差改变信息是否符合基准受力偏差信息的要求;
43、若符合,则控制举升机沿移动方向信息移动;
44、若不符合,则继续控制举升机沿后退方向信息以后退功率信息和后退频率信息后退,直至第三受力偏差改变信息符合基准受力偏差信息的要求。
45、通过采用上述技术方案,根据移动方向信息确定举升机的后退方向信息,控制举升机沿后退方向信息以后退功率信息和后退频率信息后退,从而使配件在惯性的作用下由在后举升机构滑移至在前举升机构,并对前举升机构和在后举升机构的第三受力偏差改变信息,在第三受力偏差改变信息不符合基准受力偏差信息的要求时,继续控制举升机后退调整配件的位置,进而提高配件于举升台上位置调整的方便性。
46、可选的,控制第一举升机构和第二举升机构举升配件的方法包括:
47、根据预设的举升功率信息控制第一举升机构和第二举升机构举升配件,并于预设的检测时间信息后,获取第一举升机构的第一举升高度信息和第二举升机构的第二举升高度信息;
48、计算第一举升高度信息与第二举升高度信息之间的差值,并将计算得到的差值定义为高度偏差信息;
49、判断高度偏差信息是否符合预设的控制高度信息的要求;
50、若不符合,则继续获取第一举升高度信息和第二举升高度信息;
51、若符合,则根据高度偏差信息控制第一举升机构和第二举升机构举升配件。
52、通过采用上述技术方案,控制第一举升机构和第二举升机构以举升功率信息举升配件,在检测时间信息后,对第一举升机构的第一举升高度信息和第二举升机构的第二举升高度信息进行检测,计算第一举升高度信息和第二举升高度信息的差得到高度偏差信息,将高度偏差信息与控制高度信息进行对比,在高度偏差信息符合控制高度信息的要求时,即第一举升高度信息与第二举升高度信息相差较大,根据高度偏差信息控制第一举升机构和第二举升机构举升配件,进而提高配件举升时的稳定性。
53、可选的,根据高度偏差信息控制第一举升机构和第二举升机构举升配件的方法包括:
54、根据高度偏差信息进行分析,以确定降速举升机构和升速举升机构;
55、根据高度偏差信息以确定举升功率改变信息;
56、控制降速举升机构以举升功率改变信息降速,控制升速举升机构以举升功率改变信息升速,并获取高度齐平触发信息;
57、基于高度齐平触发信息,获取降速举升机构的降速受力信息和升速举升机构的升速受力信息;
58、根据预设的基准举升速度信息和降速受力信息进行分析,以确定降速举升机构功率信息,根据基准举升速度信息和升速受力信息进行分析,以确定升速举升机构功率信息;
59、控制降速举升机构以降速举升机构功率信息举升配件,并控制升速举升机构以升速举升机构功率信息举升配件。
60、通过采用上述技术方案,根据高度偏差信息确定降速举升机构和升速举升机构,再根据高度偏差信息确定举升功率改变信息,控制降速举升机构以举升功率改变信息降速,再控制升速举升机构以举升功率改变信息升速,并在升速举升机构和降速举升机构高度平齐,即检测到高度齐平触发信息时,检测降速举升机构的降速受力信息和升速举升机构的升速受力信息,根据基准举升速度信息和降速受力信息确定降速举升机构功率信息,根据基准举升速度信息和升速受力信息确定升速举升机构功率信息,从而控制降速举升机构以降速举升机构功率信息举升配件,并控制升速举升机构以升速举升机构功率信息举升配件,进而提高举升机举升配件时的稳定性。
61、第二方面,本技术提供一种举升机控制系统,采用如下的技术方案:
62、一种举升机控制系统,包括:
63、获取模块,用于获取配件放置触发信息、第一受力信息、第二受力信息和目的地到达触发信息;
64、存储器,用于存储如上述任一项的一种举升机控制方法的程序;
65、处理器,存储器中的程序能够被处理器加载执行且实现如上述任一项的一种举升机控制方法。
66、通过采用上述技术方案,通过获取模块获取与举升机举升相关的一系列数据,控制处理器加载并执行存储器中存储的一种举升机控制方法的计算机程序,对获取模块获取的数据进行分析处理,从而完成举升机对配件的举升,进而提高举升机举升配件时的稳定性。
67、第三方面,本技术提供一种智能终端,采用如下的技术方案:
68、一种智能终端,包括存储器和处理器,存储器上存储有能够被处理器加载并执行如上述任一项的一种举升机控制方法的计算机程序。
69、通过采用上述技术方案,通过操作智能终端,使处理器加载并执行存储器中存储的一种举升机控制方法的计算机程序,从而控制举升机对配件进行举升,进而提高举升机举升配件时的稳定性。
70、第四方面,本技术提供一种计算机存储介质,能够存储相应的程序,具有便于实现提高举升机举升汽车配件时的稳定性的特点,采用如下的技术方案:
71、一种计算机可读存储介质,存储有能够被处理器加载并执行上述任一种举升机控制方法的计算机程序。
72、通过采用上述技术方案,在计算机可读存储介质中存储有一种举升机控制方法的计算机程序,在控制举升机对配件进行举升时,使处理器加载并执行存储器中存储的计算机程序,从而控制举升机举升配件,进而提高举升机举升配件时的稳定性。
73、综上所述,本技术包括以下至少一种有益技术效果:
74、通过在配件放置在举升机的举升台,即检测到配件放置触发信息时,控制举升机移动,并检测第一举升机构的第一受力信息和第二举升机构的第二受力信息,计算第一受力信息与第二受力信息之间的差得到受力偏差信息,将受力偏差信息与基准受力偏差信息进行对比,在受力偏差信息不符合基准受力偏差信息的要求时,说明配件对第一举升机构和第二举升机构的压力不均匀,容易造成在相同功率下,举升的高度不同,因此调整配件于举升台上的位置,以使受力偏差信息符合基准受力偏差信息的要求,在检测到目的地到达触发信息,即举升机移动至目的地后,控制第一举升机构和第二举升机构举升配件,进而提高举升机举升配件时的稳定性;
75、通过对配件质量信息进行检测,并将配件质量信息与配件同步举升信息进行对比,在配件质量信息不符合配件同步举升信息的要求,即配件质量较重时,检测位置调整方式信息,根据位置调整方式信息调整配件于举升台上的位置,进而提高调整配件于举升台上位置的方便性;
76、通过控制第一举升机构和第二举升机构以举升功率信息举升配件,在检测时间信息后,对第一举升机构的第一举升高度信息和第二举升机构的第二举升高度信息进行检测,计算第一举升高度信息和第二举升高度信息的差得到高度偏差信息,将高度偏差信息与控制高度信息进行对比,在高度偏差信息符合控制高度信息的要求时,即第一举升高度信息与第二举升高度信息相差较大,根据高度偏差信息控制第一举升机构和第二举升机构举升配件,进而提高配件举升时的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!