一种青饲料收获机自动跟车抛送填装方法
本发明涉及一种青饲料收获机自动跟车抛送填装方法,属于农业机械自动化。
背景技术:
1、青贮饲料是畜牧业最主要的饲料之一,物料秸秆中含有较多的蛋白质和脂肪,既可以用来青饲料,也可以用于直接饲喂,青贮饲料保存时间长,养分流失率低,是非常好的能量饲料和优质纤维,随着近几年青贮作物的种植量逐渐增多,对于青贮作物机械收获的需求也越来越大,但我国青贮饲料收获机存在无法实现自动抛送,且料车车斗内物料填装不均匀,填装质量小,料车车斗空间利用率低等问题,本发明提供一种青饲料收获机自动跟车抛送填装方法,通过设置填装轨迹与补充填装轨迹,提高了青饲料收获机自动抛送到料车车斗时的均匀性,料车车斗承载的物料总重量及料车车斗空间利用率。
技术实现思路
1、针对现有技术的不足,本发明提出了一种青饲料收获机自动跟车抛送填装方法,该方法能显著提高青饲料收获机自动抛送到料车车斗时的均匀性,料车车斗承载的物料重量及料车车斗空间利用率。
2、本发明的目的通过如下技术方案来实现:一种青饲料收获机自动跟车抛送填装方法,其特征在于,具体包括以下步骤:
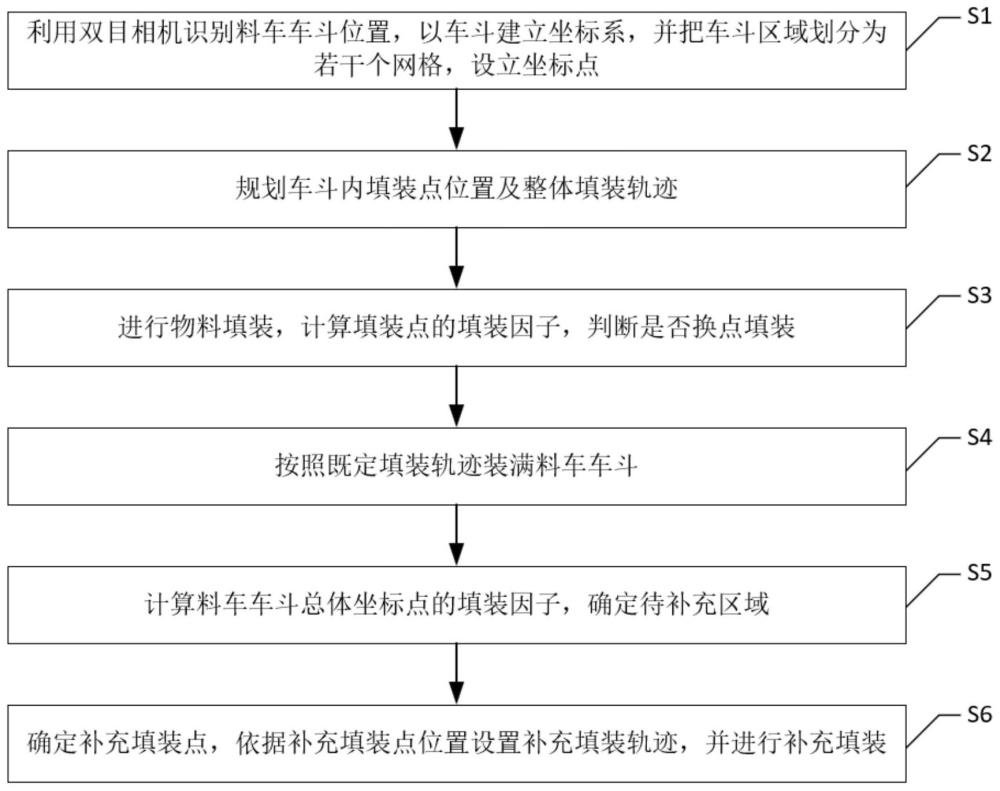
3、s1、利用双目相机识别料车车斗位置,以车斗建立坐标系,并把车斗区域划分为若干个网格,设立坐标点
4、通过安装在青饲料收获机抛筒臂上的双目相机识别料车车斗位置,得到料车车斗位置图像,以车斗上边沿与左边沿为坐标x、y轴建立坐标系,并把车斗区域以网格形式进行划分,所有网格交点设为坐标点。
5、s2、规划车斗内物料填装点位置及整体填装轨迹
6、沿料车车斗长边方向,在宽度方向二分之一线处,按一定距离均布七个填装点,在宽度方向四分之一线处,按一定距离均布六个填装点,在宽度方向四分之三线处,按一定距离均布六个填装点。四分之一线处与四分之三线处的填装点与二分之一线处的填装点交错排列。整体填装轨迹为依次沿宽度方向二分之一线处的填装点,四分之一线处的填装点,四分之三线处的填装点进行填装。
7、s3、进行物料填装,计算填装点的填装因子,判断是否换点填装
8、控制抛筒位置,根据整体填装轨迹对料车车斗进行物料填装,同时依据深度相机获得的料车车斗内的深度点云图,计算填装点处的填装因子,当某一填装点的填装因子大于1.3时,判断该填装点已经达到填装要求,进行换点,否则,继续对该点进行填装。
9、s4、按照既定填装轨迹装满料车车斗
10、整体填装轨迹为依次沿宽度方向二分之一线处的填装点,四分之一线处的填装点,四分之三线处的填装点进行填装。沿二分之一线位置从车头向车尾方向进行填装,沿四分之一线位置从车尾向车头方向进行填装,沿四分之三线位置从车头向车尾方向进行填装,直至各填装点的填装因子均大于1.3。
11、s5、计算料车车斗总体坐标点的填装因子,确定待补充区域
12、通过深度相机获得料车车斗总体深度点云图,计算料车车斗所有坐标点的填装因子,判断坐标点的填装状态,依据各点的填装状态,确定对应的网格区域填装状态,包括未满区域、临界区域与已完成区域,其中定义未满区域与临界区域为待补充区域。
13、s6、确定补充填装点,依据补充填装点位置设置补充填装轨迹,并进行补充填装。
14、根据待补充区域,确定待补充区域内网格的坐标点为补充填装点。采用路径规划算法找出遍访每个补充填装点恰好一次的一条回路并使其路径长度为最短,确定此回路为补充填装轨迹,控制抛筒沿距离抛筒出料口最近的补充填装点开始补充填装,直至历经所有补充填装点,料车车斗填装状态为已完成,结束填装。
15、进一步地,上述步骤s1中还包括以下子步骤:
16、s11、通过安装在青饲料收获机抛筒臂上的双目相机识别料车车斗位置,得到料车车斗位置图像;
17、s12、以车斗上边沿与左边沿为坐标x、y轴建立坐标系,上边沿与左边沿交点为坐标系原点o,并把车斗区域以网格形式进行划分,所有网格交点设为坐标点。
18、s13、考虑到青贮饲料的堆积特性及装置整体的计算速度,划分网格大小为30cm×30cm。
19、进一步地,上述步骤s2中还包括以下子步骤:
20、s21、以4.2m×1.8m×1.8m货车车斗为例,沿料车车斗长边方向,在宽度方向二分之一线处设置七个填装点,七个填装点均匀分布。第一填装点设置在距离左边线0.3m处,第二填装点至第七填装点均与前一填装点距离0.6m;
21、s22、沿料车车斗宽度方向四分之一线处设置六个填装点,六个填装点均匀分布。第一填装点设置在距离右边线0.6m处,第二填装点至第六填装点均与前一填装点距离0.6m;
22、s23、沿料车车斗宽度方向四分之三线处设置六个填装点,六个填装点均匀分布。第一填装点设置在距离左边线0.6m处,第二填装点至第六填装点均与前一填装点距离0.6m;
23、s24、料车车斗宽度方向四分之一线与四分之三线处的填装点与料车车斗宽度方向二分之一线处的填装点交错排列;
24、s25、整体填装轨迹为依次沿宽度方向二分之一线处的填装点,四分之一线处的填装点,四分之三线处的填装点进行填装。
25、进一步地,上述步骤s3中还包括以下子步骤:
26、s31、控制抛筒位置,根据整体填装轨迹对料车车斗进行物料填装,同时依据深度相机获得的料车车斗内的深度点云图,计算填装点处的填装因子;
27、s32、当填装点的填装因子大于1.3时,判断该填装点已经达到填装要求,进行换点,否则,继续对该点进行填装;
28、s33、填装因子计算方法:
29、
30、其中物料高度由深度点云图换算得出。
31、进一步地,上述步骤s4中还包括以下子步骤:
32、s41、整体填装轨迹为依次沿宽度方向二分之一线处的填装点,四分之一线处的填装点,四分之三线处的填装点进行填装;
33、s42、沿二分之一线位置从车头向车尾方向进行填装,沿四分之一线位置从车尾向车头方向进行填装,沿四分之三线位置从车头向车尾方向进行填装,直至各填装点的填装因子均大于1.3。
34、进一步地,上述步骤s5中还包括以下子步骤:
35、s51、完成初步填装后,仍存在一些未满区域,需要进行进一步的补充填装,通过深度相机获得料车车斗总体深度点云图,计算料车车斗所有坐标点的填装因子,判断坐标点对应的网格区域的填装状态;
36、s52、设定填装因子小于0.9的点为未满点,对应的网格区域的填装状态为未满区域,填装因子大于等于0.9小于1.1的点为临界点,对应的网格区域的填装状态为临界区域,填装因子大于等于1.1的点为已完成点,对应的网格区域的填装状态为已完成区域;
37、s53、为了更加清晰看出各区域的分布,设置检测出未满区域标记为红色,检测出临界区域标记为黄色,检测出已完成区域标记为绿色。为了便于表达,附图中用三角形替代红色,正方形替代黄色,灰色替代绿色。
38、进一步地,上述步骤s6中还包括以下子步骤:
39、s61、根据待补充区域,确定待补充区域内网格的坐标点为补充填装点;
40、s62、采用路径规划算法找出遍访每个补充填装点恰好一次的一条回路并使其路径长度为最短,确定此回路为补充填装轨迹,控制抛筒沿距离抛筒出料口最近的补充填装点开始补充填装,直至历经所有补充填装点,料车车斗填装状态为已完成,结束装填;
41、算法的设计:假设抛送筒从一个补充填装点出发,经过所有的补充填装点一次且仅一次,最后回到起始补充填装点的最短路径长度,即求最优解。
42、1)设置迭代的总代数;
43、2)根据所有的补充填装点随机生成一个补充填装轨迹,并计算此时的路径长度,预设为最短路径长度;
44、3)若当前迭代次数小于总次数,随机交换两个补充填装点的顺序,计算总长度,否则,输出当前的最短路径长度与补充填装点轨迹;
45、4)若当前的总路径距离小于预设的最短路径长度,更新最短路径长度,否则继续进行迭代,进行第3)步;
46、5)输出当前的最短路径长度与补充填装点轨迹。
47、本发明的有益效果如下:
48、本发明所提供的一种青饲料收获机自动跟车抛送填装方法,针对我国青饲料收获机存在无法实现自动抛送,且料车车斗内物料填装不均匀,填装质量小,料车车斗空间利用率低等问题,提供一种青饲料收获机自动跟车抛送填装方法,通过设置填装轨迹与补充填装轨迹,提高了青饲料收获机自动抛送到料车车斗时的均匀性,料车车斗承载的物料重量及料车车斗的空间利用率。
- 还没有人留言评论。精彩留言会获得点赞!