引导工作中的起重机以减少变速驱动器的环境影响的系统的制作方法
本发明涉及一种用于引导起重机的系统。更特别地,本发明涉及一种用于采用生态设计方法引导工作中的起重机的系统,对于该系统,实施起重机的不同移动的电动致动器和变速驱动器的使用是尽可能地节能和低污染的。本发明还涉及一种包括上述引导系统的起重机。本发明还涉及一种通过引导工作中的起重机来实施的引导方法。本发明为多种起重机类型(例如:顶部回转式起重机、自升式起重机、俯仰式起重机、能够在轨道上平移移动的起重机)找到了最受欢迎但非限制性的应用。
背景技术:
1、以已知的方式,负载是通过起重机借助于由起重机操作员从存在于驾驶室中或无线电控制器或任何远程控制站上的引导界面引导的电动工作致动器来提升和移位的;此类引导界面可以是控制操纵杆和/或按钮的形式。
2、在起重机的领域中,工作致动器通常包括:提升绞盘,其用于将负载竖直地提升和下降;分配绞盘,其用于通过使分配器托架移位以沿着分配器悬臂分配装料;转向致动器,其用于使悬臂围绕竖直轴线转向;俯仰致动器,其用于使悬臂相对于俯仰式起重机成角度地俯仰或降低;平移致动器,其对于能够平移移动的起重机来说用于使起重机在轨道上平移;等等。
3、对于负载的移位运动的每种类型(提升、分配、转向、俯仰、平移等),电动马达(即后面所谓的工作致动器)对于其完成是必要的。
4、实施起重机能够执行的若干运动中的一种运动的至少一个工作致动器通常连接到变速驱动器(也被称为变频驱动器),其被配置成调节工作致动器的电动马达的速度以控制移动、管理消耗的能量、减少马达的控制应用上的机械应力等。变速驱动器还连接到起重机的控制命令系统,该控制命令系统又连接到引导界面。因此,当起重机操作员使用引导界面以便根据给定速度实施移动时,引导界面生成引导信号,该引导信号被发送到控制命令系统,该控制命令系统将它们转换成引导命令。然后,这些引导命令由控制命令系统发送到变速驱动器。依据这些,变速驱动器将速度设定点传输到至少一个工作致动器,使得其以期望的速度执行移动。
5、因此,变速驱动器与每个起重机移动相关联。因此,变速驱动器以及由此延伸的移动在相互引导方面是独立的。一般来说,起重机的操作被设计成使得起重机操作员可以同时执行所有运动,只要该同时性是可能的和/或授权的。例如,提升、转向和分配移动在平移期间可以被禁止。
6、然而,如今,企业必须积极遵守新法规,以启动其生态转型,并将可持续发展行为付诸实践,以便为本世纪的主要环境问题带来全球性和可持续的解决方案。生态转型旨在建立一种有弹性的和可持续性的经济、社会发展模式,其积极反思消费、生产、工作和共同生活的方式,特别是在能量消耗和减少污染排放方面。
7、变速驱动器是包括电力电子器件、控制电子器件、用于冷却的机械构件、机电部件的马达等的电动/电子系统。然而,变速驱动器中包括的一些部件或子系统需要用稀有的和/或污染严重的材料来制造,这些材料还可能借助于同样污染性的或在生态上有争议的化合物来处理或成形。例如,在一些使用过的材料中引入了添加剂,比如阻燃剂,其可能对健康有害。此外,变速驱动器的部件通常很少被修复/回收,并且在发生故障或损坏时很难修理。
8、这就是为什么在起重机的操作中使用多个变速驱动器往往变得与日益严格的环境法规不相容,并且与减少建筑领域中广泛使用的起重机的生态影响的期望不相容。
技术实现思路
1、本发明旨在通过提供一种用于实施起重机的移动的引导解决方案来解决上文所阐述的问题,其更生态,特别是通过比当前的引导解决方案更节能、污染更少和更生态;并且对于可比较的操作性能也是如此。
2、本发明涉及一种用于引导工作中的起重机的引导系统,该引导系统至少包括:
3、-引导界面,其使得起重机操作员能够通过起重机引导负载的位移移动;
4、-控制命令系统,其连接到引导界面,以接收源自引导界面的引导信号并根据所述引导信号生成引导命令;
5、-确保负载的位移移动的工作致动器;
6、-变速驱动器,其连接到控制命令系统和工作致动器,以接收源自控制命令系统的引导命令并根据引导命令向工作致动器传送速度设定点。
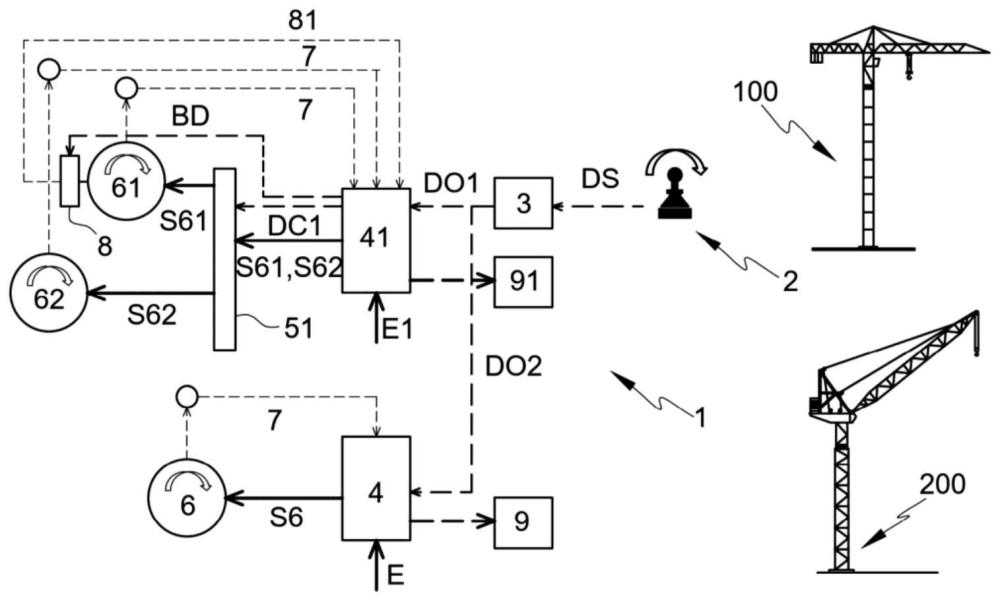
7、该引导系统的显著之处在于,变速驱动器中的至少一个(即所谓的公共变速驱动器)经由分配继电器连接到工作致动器中的至少两个工作致动器(即所谓的共享致动器),所述分配继电器被引导,以便将公共变速驱动器与至少两个共享致动器中的每一个交替地连接,使得至少两个共享致动器交替地起作用。
8、换句话说,本发明提出将由起重机在其工作时可以执行的两个不同的位移移动相关联,并且因此将各自负责两个移动之一的两个工作致动器与一个单个变速驱动器相关联。如上文所述,负责两个位移移动的工作致动器被称为共享致动器,并且连接到这两个共享致动器的变速驱动器被称为公共变速驱动器。
9、两个共享致动器与公共变速驱动器的连接意味着两个位移移动不能同时执行,而是交替执行。特别地,该交替是由分配继电器确保的。因此,如果起重机操作员希望开始两个移动中的另一个移动,则他应完成两个移动中的一个移动。
10、在本发明的一个实施例中,在第一位移移动结束之后(其由起重机的像传感器的装备和/或由控制命令系统检测),起重机操作员将不得不等待预定的短时间段(例如,几秒钟)以开始第二位移移动。为了通知起重机操作员该时间段已经过去,可以考虑引导界面通过显示在屏幕上的文本消息或视觉指示和/或听觉信号来通知他。
11、在本发明的第二实施例中,分配继电器由控制命令系统控制。根据由控制命令系统接收的代表起重机操作员希望执行的两个位移移动中的一个的引导信号,分配继电器将公共变速驱动器的输出连接到负责所述位移移动的共享致动器的输入;使得公共变速驱动器为其供应必要的动力,以用于以期望的速度完成位移移动。因此,公共变速驱动器不经由分配继电器电连接到负责两个移动中的另一个移动的共享致动器。
12、在本发明的第三实施例中,在位移移动的速度应严格准确的应用环境中,起重机上存在的速度测量装置(比如传感器)被配置成在执行两个位移移动时测量所述速度,然后将测量的速度传输到公共变速驱动器。然后,公共变速驱动器将测量的速度值与包含在引导命令中的速度设定点进行比较;依据测量的速度是否低于(相应地高于)速度设定点,向共享致动器供应更多(相应地更少)的动力。在本发明的变型中,一旦接收到速度测量结果,公共变速驱动器就将这些速度测量结果传输到控制命令系统,该控制命令系统将它们与由引导界面发送的引导信号进行比较。依据比较结果,控制命令系统调整或不调整传输到公共变速驱动器的用于引导共享致动器的引导命令。在本发明的变型中,可以考虑由传感器测量的速度被直接传输到控制命令系统。
13、在本发明的第四实施例中,为了调节位移移动的速度,可以考虑为起重机装备与工作致动器中的至少一个相关联的至少一个制动器,该制动器在本发明的两个变型中由变速驱动器或者由控制命令系统引导。还可以考虑制动器将其状态(打开的制动器或关闭的制动器)传送到变速驱动器或控制命令系统。
14、所提出的解决方案的第一个优点是积极适应促进可持续发展的生态设计方法。
15、通过使用一个单个变速驱动器而不是两个来实施起重机在工作中的两个位移移动,这因此意味着仅需要制造一个变速驱动器。对于变速驱动器制造商来说,这相当于将制造步骤期间使用的资源的数量减少一半,无论这是否涉及难以修复和/或回收的部件;可能是稀有的和污染性的材料、有害添加剂等。
16、本发明还更节能,因为一个单个变速驱动器必须被供电才能起作用。
17、此外,可以为起重机装备若干公共变速驱动器,因为依据起重机类型,可以将两个位移移动组合在一起。通常从不并行执行但连续执行的两个移动可以组合在一起。例如,提升、转向或分配移动在平移移动期间通常是被禁止的。
18、因此,并且有利地,所提出的发明允许减少变速驱动器的环境影响,并且通过起重机的扩展,在许多层面上,无论是:关于建筑工地上的应用环境;或者关于不可回收的和/或污染性的和/或对健康有潜在危害的资源的流通和开发。
19、本发明的第二个优点是经济性的,因为通过减少变速驱动器的数量,起重机的制造成本降低(该降低还可能涉及起重机的购买价格)。
20、最终,本发明的最后一个优点是,抑制将两个致动器与公共变速驱动器相关联的变速驱动器不会导致起重机在负载位移方面的操作性能的退化;因为,如前所述,组合在一起的两个位移移动对应于通常连续执行的移动。
21、根据本发明的特征,分配继电器由公共变速驱动器引导,该公共变速驱动器被设计成根据源自控制命令系统的引导命令向所述分配继电器发送分配设定点。
22、换句话说,切换分配继电器以将公共变速驱动器连接到两个共享致动器中的任一个是由公共变速驱动器本身引导的。依据由此接收的引导命令,公共变速驱动器向分配继电器发送分配设定点,使得其从一个共享致动器切换到另一个,或者其保持其当前的切换配置。
23、根据本发明的特征,控制命令系统被设计成当所述起重机操作员作用在引导界面上以便同时引导与仅可以交替地起作用的共享致动器相关联的两个移动时,向引导界面传输旨在给起重机操作员的警报消息。
24、在起重机操作员尝试实施与共享致动器相关联的两个位移移动的情况下,引导界面显示由控制命令系统发出的错误消息,并且起重机操作员的动作被取消,也就是说,在他尝试时,两个移动都不会开始。
25、在本发明的实施例中,在第一位移移动的执行的结束和第二位移移动的开始之间提供了时间段,在起重机操作员试图在该时间段期间开始第二移动的情况下,控制命令系统发出错误消息。因此,起重机操作员的敲击,也就是说,通过在引导两个位移移动的控制件上交替地施加脉冲来引导,是被自动检测到的,然后被取消。
26、根据本发明的特征,工作致动器包括与提升移动相关联的提升致动器、与转向移动相关联的转向致动器以及与用于具有悬臂起重机类型的起重机的分配移动相关联的分配致动器,并且至少两个共享致动器在第一配置中包括提升致动器和转向致动器,或者至少两个共享致动器在第二配置中包括提升致动器和分配致动器。
27、根据本发明的特征,分配致动器连接到变速驱动器中的不同于第一配置中的公共变速驱动器的另一个变速驱动器,或者转向致动器连接到变速驱动器中的不同于第二配置中的公共变速驱动器的另一个变速驱动器。
28、根据本发明的特征,引导系统使得:
29、-在第一配置中:另一个变速驱动器(所谓的另一个公共变速驱动器)经由另一个分配继电器连接到与平移移动相关联的平移致动器并连接到分配致动器,所述另一个分配继电器被引导,以便将另一个公共变速驱动器与平移致动器和分配致动器交替地连接,使得平移致动器和分配致动器交替地起作用;或者
30、-在第二配置中:另一个变速驱动器(所谓的另一个公共变速驱动器)经由另一个分配继电器连接到与平移移动相关联的平移致动器并连接到转向致动器,所述另一个分配继电器被引导,以便将另一个公共变速驱动器与平移致动器和转向致动器交替地连接,使得平移致动器和转向致动器交替地起作用。
31、与公共变速驱动器相关的两个位移移动是根据人体工程学选择的,以便在抑制与两个位移移动中的一个相关的变速驱动器之后,保持或至少接近起重机对于负载的位移的相同操作性能,即保持起重机的流体/动态引导。
32、如前所述,组合在一起的两个位移移动由通常连续执行的位移移动构成。例如,提升、转向和分配移动在平移移动期间通常是被禁止的。事实上,起重机的引导通常在两个维度上进行:竖直地以提升负载;和沿着水平平面以分配悬臂并使其转向以使起重机的工作区域中的负载移位。这就是为什么平移移动可以与这三个移动中的每一个组合。换句话说,在本发明的不同实施例中,两个共享致动器中的一个可以对应于平移致动器,而另一个共享致动器可以对应于提升致动器、或转向致动器或分配致动器。
33、悬臂起重机集成了所提到的四种致动器类型。在两个不同的实施例中,在上文中被称为第一配置和第二配置,对于该起重机类型,可以将四个位移移动(以及因此实施它们的四个致动器)组合成两组,假设两个公共变速驱动器用于两个配置中的每一个。
34、这两种配置是根据以下两者之间的折衷来建立的:
35、-操作性能目标,例如在可以被提升和移位的负载的速度或重量方面;和
36、-安全目标,特别是用于限制过载的风险和用于在负载的移位期间控制悬臂起重机的悬挂。还可以考虑控制命令系统的实际性能。
37、第一配置属于使过载的风险和悬挂的不良控制最小化的应用环境,即使其意味着悬臂起重机的功能性能没有被充分利用。对于后者,公共变速驱动器交替地连接到转向致动器和提升致动器,而另一个公共变速驱动器交替地连接到分配致动器和平移致动器。因此,在负载移位期间出现负载瞬时过载和/或摆动的情况下,起重机操作员仍然能够通过在使负载竖直降低的同时使分配绞盘朝向桅杆来掌握悬臂起重机的引导,因为他可以同时作用在分配致动器和提升致动器上。
38、第二配置有利于起重机的操作性能,起重机操作员能够引导它,直到达到由安全标准授权的操作极限。在该第二配置中,公共变速驱动器交替地连接到转向致动器或平移致动器;而另一个公共变速驱动器交替地连接到分配致动器或提升致动器。因此,起重机操作员可以在水平平面中使负载移位,负载的重量等于由起重机的制造商施加并由扭矩/力矩限制器授权的极限,因为他可以同时作用在转向致动器和分配致动器上。
39、应注意的是,有利地,这两种配置的实施仅需要使用两个变速驱动器,而不是常规的四个。
40、根据一个特征,工作致动器包括与提升移动相关联的提升致动器、与转向移动相关联的转向致动器以及与用于具有悬臂起重机类型的起重机的悬臂俯仰移动相关联的悬臂俯仰致动器,并且至少两个共享致动器包括提升致动器和转向致动器。
41、根据一个特征,悬臂俯仰致动器连接到变速驱动器中的不同于公共变速驱动器的另一个变速驱动器。
42、根据一个特征,另一个变速驱动器(所谓的另一个公共变速驱动器)经由另一个分配继电器连接到与平移移动相关联的平移致动器并连接到悬臂俯仰致动器,所述另一个分配继电器被引导,以便将另一个公共变速驱动器与平移致动器和悬臂俯仰致动器交替地连接,使得平移致动器和悬臂俯仰致动器交替地起作用。
43、以已知的方式,俯仰式起重机(具有可以铰接或不铰接的悬臂)表征为,它们不具有分配器托架。提升绳索始终在悬臂末端处,并且副悬臂(counter-jib)比悬臂起重机的副悬臂短;这允许将该起重机类型紧邻障碍物装配和安装。
44、俯仰式起重机包括至少一个提升致动器、一个转向致动器、一个悬臂俯仰致动器和一个平移致动器。使起重机俯仰(相应地降低)以提升负载并使其靠近(相应地远离)桅杆。因此,当他们引导该起重机类型时,起重机操作员应在悬臂倾斜以改变分配半径时来补偿负载的上升或下降。
45、对于该起重机类型,在本发明的实施例中,公共变速驱动器交替地连接到转向致动器或提升致动器;而另一个公共变速驱动器交替地连接到俯仰致动器或平移致动器。
46、这是在操作性能和安全性方面提供良好折衷的唯一可能的配置,因为起重机操作员能够通过同时执行提升移动和俯仰移动来调节负载。通过同时作用在提升致动器和悬臂俯仰致动器上,起重机操作员因此可以通过组合这两种移动而在水平平面中进行引导。
47、同样,该配置的实施允许使用两个变速驱动器,而不是四个。
48、可能地,在负载的重量接近由起重机的制造商施加的负载极限的情况下,并且为了保护起重机的引导,在本发明的变型中,可以考虑将提升致动器和悬臂俯仰致动器一起连接到公共变速驱动器,并且因此将两个最恶化/危险的移动组合在一起。
49、本发明还涉及一种包括如前所述的引导系统的起重机。
50、本发明还涉及一种用于引导工作中的起重机的引导方法,该引导方法至少包括:
51、-引导步骤,其中起重机操作员在引导界面上通过起重机引导负载的位移移动;
52、-通过连接到引导界面的控制命令系统接收源自引导界面的引导信号的步骤;
53、-由控制命令系统根据所述引导信号生成引导命令的步骤;
54、-将引导命令传输到变速驱动器的步骤,该变速驱动器连接到控制命令系统和工作致动器,以确保负载的位移移动;
55、-控制步骤,其中变速驱动器根据引导命令向工作致动器传输速度设定点。
56、该引导方法的显著之处在于,变速驱动器中的至少一个(所述公共变速驱动器)经由分配继电器连接到工作致动器中的至少两个工作致动器(所谓的共享致动器),并且其包括切换步骤,在该切换步骤中,所述分配继电器被引导,以便将公共变速驱动器与至少两个共享致动器中的每一个交替地连接,使得至少两个共享致动器交替地起作用。
- 还没有人留言评论。精彩留言会获得点赞!