电梯驱动控制系统的制作方法
本发明涉及电梯,具体涉及一种电梯驱动控制系统。
背景技术:
1、现有的电梯驱动系统通常是采用速度、电流双闭环控制方式。速度环中,通常是将驱动电机的转子与电梯轿厢间的连接看作是刚性连接,利用与驱动电机转子同步旋转的驱动轮半径、电梯绕法等计算出电梯轿厢移动的线速度与驱动电机转子的角速度间的比值,利用该比值将给定的电梯轿厢的速度指令图形折算成驱动电机的转子角速度指令图形,之后再由速度控制器利用转子角速度指令图形和驱动电机的转子角速度的检测值对驱动电机的转子的角速度实施闭环控制,使得驱动电机的转子的角速度的检测值能够跟踪转子角速度指令图形,输出驱动电机的力矩电流指令;电流环中,通常是由电流控制器利用速度控制器输出的力矩电流指令与驱动电机的定子电流检测值对驱动电机的电流实施闭环控制,使得驱动电机的定子电流检测值(经变换后得到实际的力矩电流值)能够跟踪力矩电流指令。
2、实际上,电梯驱动控制中的速度控制针对的是电梯轿厢的速度控制,通过对电梯轿厢的移动速度的精确控制来获得电梯轿厢运行时的平稳性、停靠时的准确度等。现有技术实际上是将电梯轿厢与驱动电机转子间的连接作为刚性连接从而实现二者间的折算,但实际上电梯轿厢与驱动电机转子间的柔性连接(如钢丝绳、钢带等)通常都存在一定的弹性、拉伸性等,因此由于柔性连接随其长度和受力情况的不同其实际拉伸也会不同,并且柔性连接与驱动轮之间必然会存在一定的打滑,这使得轿厢位置/速度到驱动电机转子间的折算必然会带来一定的误差,尤其是对于大提升高度、大载重量电梯,尤其是电梯轿厢位于远离驱动轮的位置时偏差尤为明显,这使得现有的基于驱动电机的转子角速度的传统驱动控制应用于大提升高度、大载重量电梯时的控制性能表现欠佳。因此为了提高和改善大提升高度、大载重量电梯的驱动控制性能,必然需要直接针对电梯轿厢的移动速度实施直接控制而非现有的通过控制驱动电机的转子角速度来实现对电梯轿厢的移动速度的间接控制。为了对电梯轿厢的移动速度实施直接控制,首先需要直接对电梯轿厢的移动速度进行检测,这可以采用近年来逐渐成熟并得到越来越广泛应该的电梯轿厢绝对位置检测技术,如cn201810194044.0、cn201580067931.6。
3、另一方面,对于大提升高度电梯,其随行电缆的长度非常长,这使得建筑物因地震、大风等原因而出现较大的摇晃时可能出现随行电缆会与井道中的其它设备接触的风险,此外随行电缆的自重也会因为大提升高度而变为非常庞大,为解决这些问题,本领域出现了无随行电缆技术,如cn201010154575.0、cn201980094886.1、cn201010154575.0等。但是现有的无随行电缆技术方案多时聚焦于如何解决电梯轿厢的供电问题,暂未涉及无随行电缆时电梯轿厢与控制柜间的信息传输问题。针对这一问题,cn201880099563.7给出了在无随行电缆时在电梯轿厢与控制柜间采用无线通信方式来解决二者间的信息传输问题。但是采用无线通信方式时,由于网络拥塞等原因,不可避免地会出现程度不等的信息传输延时问题。当然,即使不是无随行电缆电梯而采用有线通信方式的电梯,电梯轿厢的移动速度的检测结果在由电梯轿厢向控制柜的传输过程中,同样会因传输网络拥塞等而出现传输延迟的现象。
4、因此,对于大提升高度电梯而言,一方面因提高对于电梯轿厢的控制性能而需要对电梯轿厢实施直接控制,因而需要将电梯轿厢的绝对位置检测结果(检测装置位于电梯轿厢处)传输给通常是位于机房的控制柜,以供位于控制柜内的电梯驱动控制系统实施包括速度环在内的驱动控制。但轿厢速度(或是轿厢位置)检测结果由轿厢到控制柜间的传输存在的延时使得电梯驱动控制系统得不到电梯轿厢的实时移动速度。这样如何在得不到电梯轿厢的实时移动速度的情况下实现对电梯轿厢的移动速度的直接控制就成为一个有待解决的技术问题。
技术实现思路
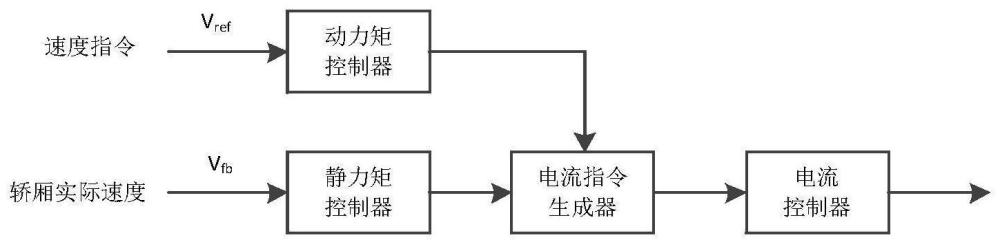
1、为解决上述技术问题,本发明提供一种电梯驱动控制系统,包括动力矩控制器、静力矩控制器、电流指令生成器和电流控制器;
2、所述动力矩控制器根据速度指令的变化生成动力矩指令;所述动力矩指令是指为实现电梯响应于速度指令的变化的运动状态改变而需要驱动电机输出的力矩;
3、所述静力矩控制器根据轿厢实际速度对于速度指令的跟踪误差生成静力矩指令,所述静力矩指令是指在所述动力矩指令的基础上为消除轿厢实际速度对于速度指令的跟踪误差或者所述跟踪误差中除去其中的随机量后得到的剩余部分而需要驱动电机输出的力矩;
4、所述电流指令生成器用于根据所述动力矩指令和所述静力矩指令生成并输出驱动电机的电流指令;
5、所述电流控制器用于根据所述电流指令和驱动电机的实际电流对驱动电梯进行控制,使得驱动电机的实际电流跟踪所述电流指令。
6、优选地,所述电梯驱动控制系统还包括:接收器,用于实时接收设置于电梯轿厢上的轿厢检测装置检测并输出检测结果,所述检测结果包括电梯轿厢实际位置和速度,以及对应的发送时刻和接收时刻,所述发送时刻是指轿厢检测装置检测得到轿厢的实际位置和速度后将其发送给所述接收器的时刻,所述接收时刻是指所述接收器接收到来自轿厢检测装置的检测结果的时刻;所述动力矩控制器根据所述接收时刻、所述发送时刻以及所述发送时刻的电梯轿厢位置确定所述接收时刻的速度指令,并根据进一步所述接收时刻的速度指令生成所述动力矩指令。
7、优选地,所述电梯驱动控制系统还包括速度指令确定器,用于确定对应于所述接收时刻的速度指令,并发送给动力矩控制器或静力矩控制器;所述速度指令确定器按照如下步骤确定所述接收时刻的速度指令:
8、步骤s1、根据所述发送时刻的轿厢位置确定速度图形中对应于所述发送时刻或对应于所述发送时刻的电梯轿厢位置的第一点,所述速度图形为以轿厢位置为横坐标、以轿厢移动的速度指令为纵坐标形成的曲线;
9、步骤s2、计算所述接收时刻与所述发送时刻之间的时间差值,并将其作为所述轿厢检测装置的检测结果在由轿厢检测装置传输到所述接收器的过程中的传输延迟;
10、步骤s3、根据所述第一点、所述速度图形以及所述传输延迟计算电梯轿厢在所述延迟时间内的轿厢移动距离;
11、步骤s4、根据所述第一点和所述轿厢移动距离确定对应于所述接收时刻的第二轿厢位置;
12、步骤s5、根据所述第二轿厢位置和所述速度图形确定对应于所述接收时刻的速度指令。
13、优选地,所述动力矩控制器进一步包括:第一模块,用于确定对应于所述接收时刻的速度指令的变化;第二模块,用于根据对应于所述接收时刻的速度指令的变化生成锁定胡所述动力矩。
14、优选地,所述第一模块包括减法单元和积分单元,所述第二模块包括一比例单元,并且所述减法单元计算所述速度指令与所述积分单元的输出的差值,并将其作为其输出;所述比例单元将所述减法单元的输出乘以一增益后得到的乘积作为其输出;所述积分单元对所述比例单元的输出进行积分,并将积分结果作为其输出;所述动力矩控制器将所述比例单元的输出作为所述动力矩指令。
15、优选地,所述动力矩控制器还将所述积分单元的输出作为所述接收时刻的速度指令输出。
16、优选地,所述静力矩控制器根据发送时刻的速度指令与轿厢实际速度间的差值生成对应于所述发送时刻的第一静力矩指令,并将所述第一静力矩指令作为所述静力矩指令输出。
17、优选地,所述静力矩控制器根据所述接收时刻的速度指令与轿厢实际速度间的差值生成第二静力矩,并将所述第二静力矩作为所述静力矩指令输出。
18、优选地,所述静力矩控制器包括减法模块和控制模块;所述减法模块计算所述速度指令与轿厢实际速度间的差值并将其作为跟踪误差;所述控制模块直接根据所述跟踪误差生成静力矩指令输出,或者根据从所述跟踪误差中除去随机量后得到的剩余部分生成所述静力矩指令。
19、优选地,当所述控制模块根据从所述跟踪误差中除去随机量后得到的剩余部分生成静力矩指令时,所述控制模块通过持续累积控制输出或者直接估计持续性扰动来生成所述静力矩指令。
20、所述控制模块采用如下任一方式得到其输出:
21、方式1、采用pi控制律且仅将其中的i控制输出作为所述静力矩指令;
22、方式2、采用自抗扰控制律且仅将其中的扩张状态观测器对于总扰动估计结果作为所述静力矩指令;
23、方式3、采用未知输入观测器并将观测结果作为所述静力矩指令;
24、方式4、采用pi控制律且将p控制与i控制的组合作为所述静力矩指令。
25、优选地,在所述方式3中,所述组合为p控制输出与预设系数β的乘积和i控制输出的和,其中,0≤β≤1;并且当δt=0时,β=1;δt越大β越小,其中δt为所述传输延迟。
26、优选地,电梯驱动控制系统还包括:报警器,用于在轿厢实际速度对于速度指令的跟踪差值超过阈值时输出报警信号。
27、优选地,所述静力矩控制器包括减法模块、控制模块、确定模块和修正模块;所述减法模块计算所述速度指令与轿厢实际速度间的差值并将其作为跟踪误差;
28、所述控制模块直接根据所述跟踪误差生成第二静力矩指令,或者根据从所述跟踪误差中除去随机量后得到的剩余部分生成第二静力矩指令;
29、所述确定模块根据所述第二静力矩指令的历史数据确定其变化规律;
30、所述修正模块根据所述第二静力矩指令的变化规律对所述第二静力矩指令进行修正,并将修正结果作为对应于所述接收时刻的静力矩指令而输出。
31、优选地,所述确定模块对第二静力矩指令的历史数据进行数据拟合,并将拟合结果作为所述变化规律而输出,所述修正模块将曲线结果中对应于所述接收时刻的第二静力矩指令为对应于所述接收时刻的静力矩指令并输出。
32、优选地,所述修正模块根据第二静力矩指令的变化规律计算得到修正量,并将所述修正量与第二静力矩指令之和作为对应于所述接收时刻的静力矩指令而输出。
33、优选地,所述修正模块根据第二静力矩指令的变化规律计算得到修正量,并将所述修正量与预设系数α的乘积加上第二静力矩指令之和作为对应于所述接收时刻的静力矩指令;并且δt越大预设系数α越小,其中δt为所述传输延时。
34、与现有技术相比,本发明可以在电梯轿厢检测信息由轿厢到控制柜的传输中存在传输延时的情况下实现对电梯驱动电机的高性能控制。
- 还没有人留言评论。精彩留言会获得点赞!