平衡重叉车AGV自动、释放驻车控制方法、装置和叉车与流程
本技术涉及移动机器人智能控制领域,特别涉及一种平衡重叉车agv自动、释放驻车控制方法、装置和平衡重叉车。
背景技术:
1、随着物料输送系统,柔性制造系统,自动化立体仓库系统等的发展,自动导引运输车系统(automated guided vehicle,agv)作为物料输送系统和柔性制造系统中的重要组成部分,可以解决传统物流系统的弊端,在制造业输送环节得到了广泛的应用。
2、平衡重叉车agv是agv的其中一种,传统agv以失电制动为主,基于电磁制动器进行制动;平衡重叉车的制动方式是以拉线机构触发制动盘装置,依靠人工脚踩触发的方式进行制动,将平衡重叉车改造为agv将面临无法按照传统agv加装电磁制动器进行制动控制及释放驻车控制的问题和存在突发断电无法制动的安全隐患。
技术实现思路
1、本技术旨在至少解决现有技术中存在的技术问题之一。为此,本技术提出一种平衡重叉车agv自动驻车控制方法,能够解决平衡重叉车改造为agv无法按照传统agv的制动控制方式进行制动的问题。
2、本技术还提出一种平衡重叉车agv自动释放驻车控制方法,能够解决平衡重叉车改造为agv无法按照传统agv的释放驻车制动控制进行释放驻车的问题。
3、本技术还提出一种具有上述平衡重叉车agv自动驻车控制方法和平衡重叉车agv自动释放驻车控制方法的平衡重叉车agv自动驻车装置。
4、本技术还提出一种具有上述平衡重叉车agv自动驻车装置的平衡重叉车。
5、根据本技术的第一方面实施例的平衡重叉车agv自动驻车控制方法,应用于平衡重叉车agv自动驻车装置,所述方法包括以下步骤:
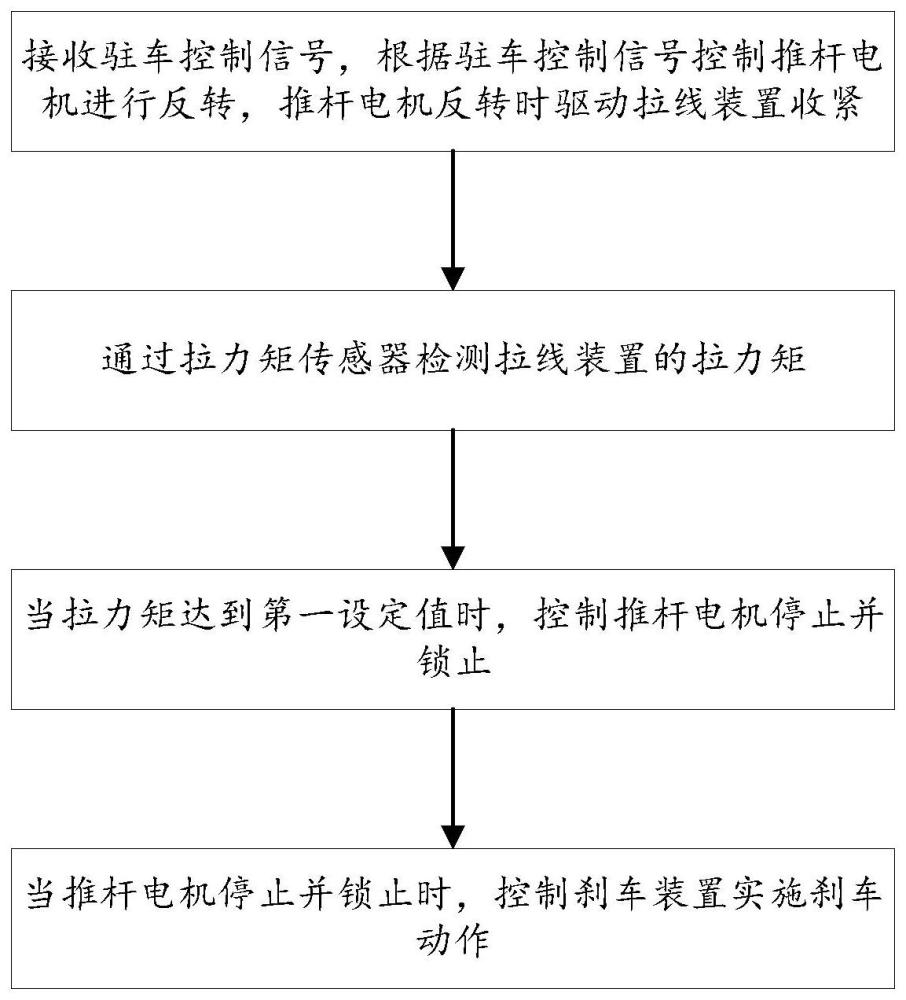
6、接收驻车控制信号,根据所述驻车控制信号控制推杆电机进行反转,所述推杆电机反转时驱动拉线装置收紧;
7、通过拉力矩传感器检测所述拉线装置的拉力矩;
8、当所述拉力矩达到第一设定值时,控制所述推杆电机停止并锁止;
9、当所述推杆电机停止并锁止时,控制刹车装置实施刹车动作。
10、根据本技术的一些实施例,所述接收驻车控制信号,根据所述驻车控制信号控制推杆电机进行反转,包括:
11、当接收到安全控制器发送的异常信号、备用电源投入使用信号和/或驻车请求信号时,控制推杆电机进行反转;
12、其中,所述异常信号包括安全回路断开信号。
13、根据本技术的一些实施例,所述根据所述驻车控制信号控制推杆电机进行反转,还包括:
14、检测所述推杆电机的电流值及电流方向;
15、若所述电流值不在第一预设值范围内和/或所述电流方向与预设方向不一致,则发送停机指令至牵引电机驱动装置;
16、控制所述牵引电机驱动装置根据所述停机指令控制牵引电机进行故障停车。
17、根据本技术的一些实施例,所述方法还包括:
18、通过所述拉力矩传感器检测所述拉线装置的拉力矩;
19、若所述拉力矩不在第二预设值范围内,则发送停机指令至牵引电机驱动装置;
20、控制所述牵引电机驱动装置根据所述停机指令控制牵引电机进行故障停车。
21、根据本技术的一些实施例,所述控制刹车装置实施刹车动作,还包括:
22、通过编码器检测牵引电机的转速;
23、若所述牵引电机的转速大于第三预设值,则发送停机指令至牵引电机驱动装置;
24、控制所述牵引电机驱动装置根据所述停机指令控制所述牵引电机进行故障停车。
25、根据本技术的第二方面实施例的平衡重叉车agv自动释放驻车控制方法,应用于平衡重叉车agv自动驻车装置,所述方法包括以下步骤:
26、接收驻车释放请求信号,根据所述驻车释放请求信号控制推杆电机进行正转,所述推杆电机正转时驱动拉线装置释放;
27、通过拉力矩传感器检测所述拉线装置的拉力矩;
28、当所述拉力矩达到第二设定值时,控制所述推杆电机停止并锁止;
29、当所述推杆电机停止并锁止时,控制刹车装置实施刹车释放操作。
30、根据本技术的一些实施例,所述方法还包括:
31、检测所述推杆电机的电流值及电流方向,通过所述拉力矩传感器检测所述拉线装置的拉力矩,通过编码器检测牵引电机的转速;
32、若所述电流值不在第四预设值范围内、所述电流方向与预设方向不一致、所述拉力矩不在第五预设值范围内、和/或所述牵引电机的转速小于第六预设值,则发送停机指令至牵引电机驱动装置;
33、控制所述牵引电机驱动装置根据所述停机指令控制牵引电机进行故障停车。
34、根据本技术的第三方面实施例的平衡重叉车agv自动驻车装置,用于实现上述第一方面实施例的平衡重叉车agv自动驻车控制方法和上述第二方面实施例的平衡重叉车agv自动释放驻车控制方法,所述平衡重叉车agv自动驻车装置,包括:
35、电源模块;
36、控制模块,所述控制模块与所述电源模块连接;
37、驻车动作模块,所述驻车动作模块一端与所述电源模块连接,另一端与所述控制模块连接。
38、根据本技术的一些实施例,
39、所述电源模块包括:
40、主电源模块;
41、独立备用电源模块,所述独立备用电源模块与所述主电源模块连接,所述主电源模块用于对所述独立备用电源模块充电;
42、所述控制模块包括:
43、逻辑控制装置;
44、安全控制装置,所述安全控制装置一端与所述逻辑控制装置连接;
45、所述驻车动作模块包括:
46、推杆电机装置;所述推杆电机装置一端与所述逻辑控制装置连接;
47、拉线装置;所述拉线装置一端与所述推杆电机装置连接;
48、拉力矩传感器装置;所述拉力矩传感器装置一端与所述拉线装置连接,另一端与所述安全控制装置和所述逻辑控制装置连接;
49、刹车装置,所述刹车装置一端与所述拉线装置连接;
50、牵引电机装置,所述牵引电机装置一端与所述刹车装置连接;
51、编码器装置,所述编码器装置一端与所述牵引电机装置连接,另一端与所述逻辑控制装置连接;
52、牵引电机驱动装置,所述牵引电机驱动装置一端与所述牵引电机装置连接,另一端与所述逻辑控制装置连接。
53、根据本技术的第四方面实施例的一种平衡重叉车,包括上述第三方面实施例的平衡重叉车agv自动驻车装置。
54、根据本技术的第五方面实施例的一种计算机可读存储介质,其上存储有计算机程序,上述计算机程序被一个或多个处理器执行时能够实现如上述第一方面和第二方面实施例的方法的步骤。
55、根据本技术的第六方面实施例的一种计算机程序产品,上述计算机程序产品包括计算机程序,上述计算机程序被一个或多个处理器执行时能够实现如上述第一方面和第二方面实施例的方法的步骤。
56、根据本技术实施例的平衡重叉车agv自动驻车控制方法,至少具有如下有益效果:为了解决平衡重叉车改造为agv无法按照传统agv的制动控制方式进行制动的问题,本技术对平衡重叉车agv自动驻车控制方法做出以下优化:通过逻辑控制器接收驻车控制信号,根据驻车控制信号控制推杆电机反转,推杆电机反转时驱动拉线装置收紧;通过拉力矩传感器检测拉线装置的拉力矩;当拉力矩达到设定值时,控制推杆电机停止并锁止;当推杆电机停止并锁止时,刹车装置实施刹车动作,通过上述控制方法,提高了平衡重叉车agv自动驻车的可靠性和安全性。
57、根据本技术实施例的平衡重叉车agv自动驻车释放控制方法,至少具有如下有益效果:为了解决平衡重叉车改造为agv无法按照传统agv的释放驻车制动控制进行释放驻车的问题,本技术对平衡重叉车agv自动释放驻车控制方法做出以下优化:通过逻辑控制器接收驻车释放请求信号,根据驻车释放请求信号控制推杆电机正转,推杆电机正转时驱动拉线装置释放;当拉力矩达到设定值时,控制推杆电机停止并锁止;刹车装置实施刹车释放动作,通过上述控制方法,提高了平衡重叉车agv释放驻车的可靠性和安全性。
58、可以理解的是,上述第三方面至第六方面的有益效果可以参见上述第一方面和第二方面中的相关描述,在此不再赘述。
59、本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!