对用于吊装临近空间的飞行器的吊装机构控制方法
本公开的至少一种实施例涉及临近空间的飞行器,更具体地,涉及一种对用于吊装临近空间的飞行器的吊装机构控制方法。
背景技术:
1、临近空间是指距地面20至100公里的区域,应用于临近空间的飞行器包括在临近空间长期、持续飞行的飞行器或亚轨道飞行器等,该类飞行器在通信中继、导航及信息收集等方面具有优势。
2、目前,这类飞行器进入临近空间的手段一般是采用由跑道起飞自助爬升至预设的巡航高度,该方式对飞行器的动力系统要求较高,且在对飞行器进行设计时需考虑爬升阶段的过程。有鉴于此,现有技术中还尝试采用以高空气球作为主要载体的投放平台对飞行器进行吊装,并在达到预设的巡航高度时进行投放。
3、但基于上述的投放平台的吊装方式多以单绳方式进行吊装,由于这类飞行器往往具有尺寸大、质量轻、柔性大、纵向允许过载小的特点,而上述单绳吊装的方式由于难以对这类飞行器的应力进行调整,因此,容易导致飞行器发生结构失效,并且,上述的吊装方式也无法调整飞行器的姿态,从而影响飞行器被释放。
技术实现思路
1、为解决现有技术中的以及其他方面的至少一种技术问题,本公开提供一种对用于吊装临近空间的飞行器的吊装机构控制方法。基于对待吊装的飞行器由起吊阶段至释放阶段所划分的多个工况,设置飞行器所需满足的极限载荷,在满足飞行器的极限载荷要求条件下建立实体缩比模型,并通过对实体模型的吊装过程进行检测,以形成满足飞行器所能承受的应力水平及工况要求的总包线数据,并以总包线数据为依据对吊装有飞行器的吊装机构中的致动结构进行控制,以使对飞行器进行吊装的过程中,在满足飞行器的应力水平的前提下还可实现对飞行器的姿态调整。
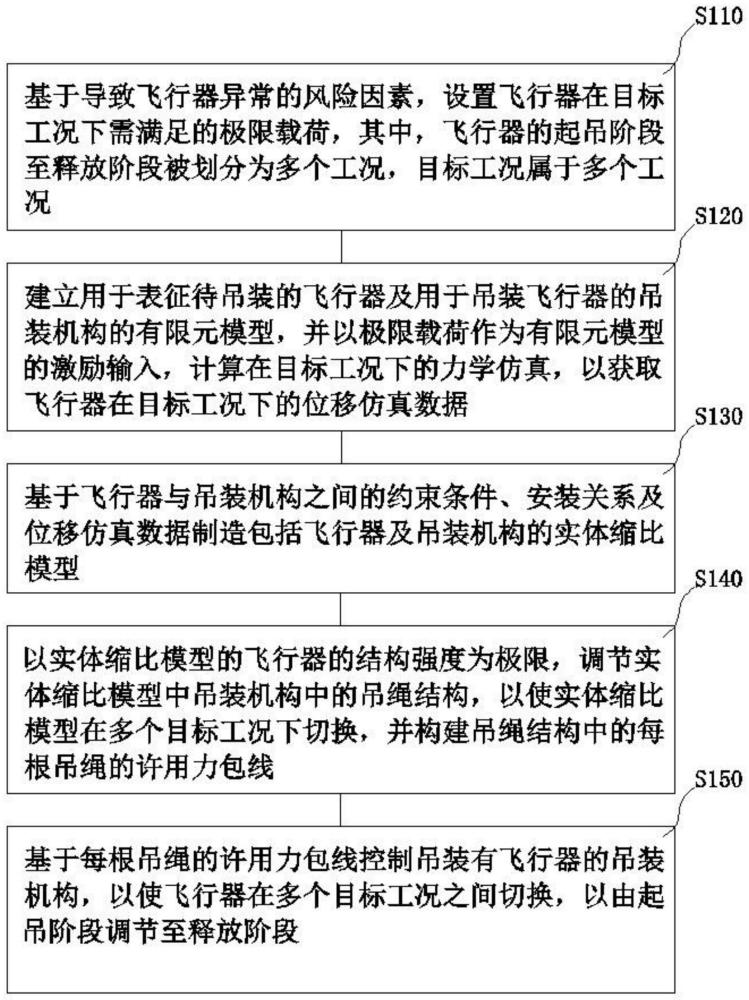
2、本公开的实施例提供了对用于吊装临近空间的飞行器的吊装机构控制方法,包括:基于导致飞行器异常的风险因素,设置上述飞行器在目标工况下需满足的极限载荷,其中,上述飞行器的起吊阶段至释放阶段被划分为多个工况,上述目标工况属于上述多个工况;建立用于表征待吊装的上述飞行器及用于吊装上述飞行器的吊装机构的有限元模型,并以上述极限载荷作为上述有限元模型的激励输入,计算在上述目标工况下的力学仿真,以获取上述飞行器在上述目标工况下的位移仿真数据;基于上述飞行器与上述吊装机构之间的约束条件、安装关系及上述位移仿真数据制造包括上述飞行器及上述吊装机构的实体缩比模型;以上述实体缩比模型的飞行器的结构强度为极限,调节上述实体缩比模型中吊装机构中的吊绳结构,以使上述实体缩比模型的飞行器在多个上述目标工况下切换,并构建上述吊绳结构中的每根吊绳的许用力包线;以及基于每根上述吊绳的上述许用力包线控制吊装有上述飞行器的吊装机构,以使上述飞行器在多个上述目标工况之间切换,以由上述起吊阶段调节至上述释放阶段。
3、根据本公开的实施例,上述导致飞行器异常的风险因素包括导致上述飞行器结构失效、导致上述飞行器的动力学状态改变及上述飞行器所处环境的环境载荷中的至少一种。
4、根据本公开的实施例,上述建立用于表征待吊装的上述飞行器及用于吊装上述飞行器的吊装机构的有限元模型,并以上述极限载荷作为上述有限元模型的激励输入,计算在上述目标工况下的力学仿真,以获取上述飞行器在上述目标工况下的位移仿真数据,包括:建立包括飞行器及吊装机构的有限元模型,并对上述有限元模型施加极限载荷,其中,上述吊装机构包括吊绳结构;在上述飞行器上添加多个约束点,并对每个约束点上分别施加在空间中相互正交的三个方向的位移约束,使得上述有限元模型处于完全约束或过度约束状态;设置每个上述位移约束的参数值及收敛标准;根据上述有限元模型及上述参数值计算每个上述位移约束所对应的应力;以及对上述有限元模型进行收敛,直至每个上述位移约束对应的上述应力均满足上述收敛标准,输出上述位移仿真数据。
5、根据本公开的实施例,上述基于上述飞行器与上述吊装机构之间的约束条件、安装关系及上述位移仿真数据制造包括上述飞行器及上述吊装机构的实体缩比模型包括:设置上述飞行器及上述吊装机构的物理属性;以及基于上述飞行器与上述吊装机构之间的约束条件、安装关系及上述位移仿真数据制造上述实体缩比模型。
6、根据本公开的实施例,上述目标工况包括对上述飞行器进行起吊的起吊工况、对上述飞行器进行释放的释放工况及对由上述起吊工况调整至上述释放工况的过渡工况。
7、根据本公开的实施例,上述以上述实体缩比模型的飞行器的结构强度为极限,调节上述实体缩比模型中吊装机构中的吊绳结构,以使上述实体缩比模型在多个上述目标工况下切换包括:测量上述吊绳结构中的每根吊绳在每个上述目标工况下,对上述实体缩比模型的飞行器所施加张力的上限值及下限值;以及基于每根上述吊绳的张力的上限值、下限值及上述实体缩比模型的飞行器的姿态角构建每根上述吊绳的许用力包线。
8、根据本公开的实施例,上述测量上述吊绳结构中的每根吊绳在每个上述目标工况下,对上述实体缩比模型的飞行器所施加张力的上限值及下限值包括:在上述实体缩比模型上配置检测机构,以在对上述实体缩比模型施加上述实体缩比模型的飞行器的所用材料的最大许用应力边界的条件下,检测由于上述吊绳的收放导致的上述实体缩比模型的飞行器的各个测量点的所受的应力。
9、根据本公开的实施例,上述在上述实体缩比模型上配置检测机构,以在对上述实体缩比模型施加上述实体缩比模型的飞行器的所用材料的最大许用应力边界的条件下,检测由于上述吊绳的收放导致的上述实体缩比模型的飞行器的各个测量点的所受的应力包括:
10、在上述起吊工况下,收放至少一部分上述吊绳,并记录每根上述吊绳的张力的上限值及下限值;预设上述实体缩比模型的飞行器的俯仰角变化量,在上述过渡工况下,收放至少一部分上述吊绳,以使上述实体缩比模型的飞行器的俯仰角依据上述俯仰角变化量被逐次调节,并记录每根上述吊绳的张力的上限值及下限值;以及收放至少一部分上述吊绳,以使上述实体缩比模型的飞行器由上述过渡工况调整至上述释放工况下,并记录每根上述吊绳的张力的上限值及下限值。
11、根据本公开的实施例,上述基于每根上述吊绳的张力的上限值、下限值及上述实体缩比模型的飞行器的姿态角构建每根上述吊绳的许用力包线包括:以上述实体缩比模型的飞行器的姿态角为横轴,以上述吊绳的张力作为纵轴,以上述张力的上限值及下限值作为上述纵轴上的坐标建立上述吊绳的许用力包线。
12、根据本公开的实施例,上述基于每根上述吊绳的上述许用力包线控制吊装有上述飞行器的吊装机构,以使上述飞行器在多个上述目标工况之间切换,以由上述起吊阶段调节至上述释放阶段包括:对每根上述吊绳的许用力包线进行参数化处理,以获得上述总包线数据;以及将上述总包线数据录入吊装有上述飞行器的上述吊装机构,并依据上述总包线数据对上述吊装机构的致动结构进行控制,以通过上述致动结构拉伸上述吊绳结构的吊绳,以将上述飞行器由上述起吊工况调整至上述释放工况。
13、根据本公开提供的对用于吊装临近空间的飞行器的吊装机构控制方法,基于对待吊装的飞行器由起吊阶段至释放阶段所划分的多个工况,设置飞行器在每个目标工况下所需满足的极限载荷,在满足飞行器的极限载荷要求条件下建立实体缩比模型,并通过对实体缩比模型的吊装过程进行检测,以形成满足飞行器所能承受的应力水平及工况要求的总包线数据,并以总包线数据为依据对吊装有飞行器的吊装机构中的致动结构进行控制,以使对飞行器进行吊装的过程中,在满足飞行器的应力水平的前提下还可实现对飞行器的姿态调整。
- 还没有人留言评论。精彩留言会获得点赞!