一种新型紧凑型厨余垃圾物袋分离机构的制作方法
本技术涉及厨余垃圾分类。
背景技术:
1、厨余垃圾的末端处理不允许有塑料垃圾袋的掺杂,会大大影响处理效率,目前使用的分类垃圾柜中都会安装有垃圾破袋机构,使得厨余垃圾桶中只有厨余垃圾,而垃圾袋则被放置在其它垃圾桶中。
2、但一般的垃圾塑料袋破袋结构,使用刀具械类工具暴力破坏垃圾袋的大部分,破袋并不完整,容易造成大量垃圾残留在垃圾袋中等缺陷,而且机构与垃圾直接接触,不仅使机构容易沾染垃圾,造成机构故障率高,需要长期维护,而且面临着容易使居民受伤的风险。
3、cn217674714u提供了一种双轴式厨余垃圾塑料袋回收机构,包括托盘、机械夹板机构、二级动作机构,机械夹板机构安装于托盘上,具有分合功能用于夹持垃圾塑料袋,二级动作机构驱动切换托盘、机械夹板机构处于不同姿态和空间位置,其所提供的厨余垃圾塑料袋回收机构提高了厨余垃圾物袋分类回收的稳定性和工作效率,展示了一种更有效、更可靠、更安全的厨余垃圾塑料袋回收机构。但是,该机构装置结构复杂,其工作方式占用空间大,实用性上有待进一步改进。
技术实现思路
1、为了解决上述问题,本实用新型提出一种新型紧凑型厨余垃圾物袋分离机构,该机构通过三组动作完成对厨余垃圾进行物袋分离,其一,夹紧与释放动作,其二,原位180度(角度仅作举例,而非限定)翻转动作,其三,水平空间120度(角度仅作举例,而非限定)平面旋转动作;
2、其中,动作一是通过特制机械夹板机构实现;
3、其中,动作二与动作三均通过一种nmrv减速机(该类减速机仅作举例,而非限定)直连电机的结构进行动力传动,实现目的动作,能够保证动作稳定与可靠。
4、本实用新型的具体技术方案如下:
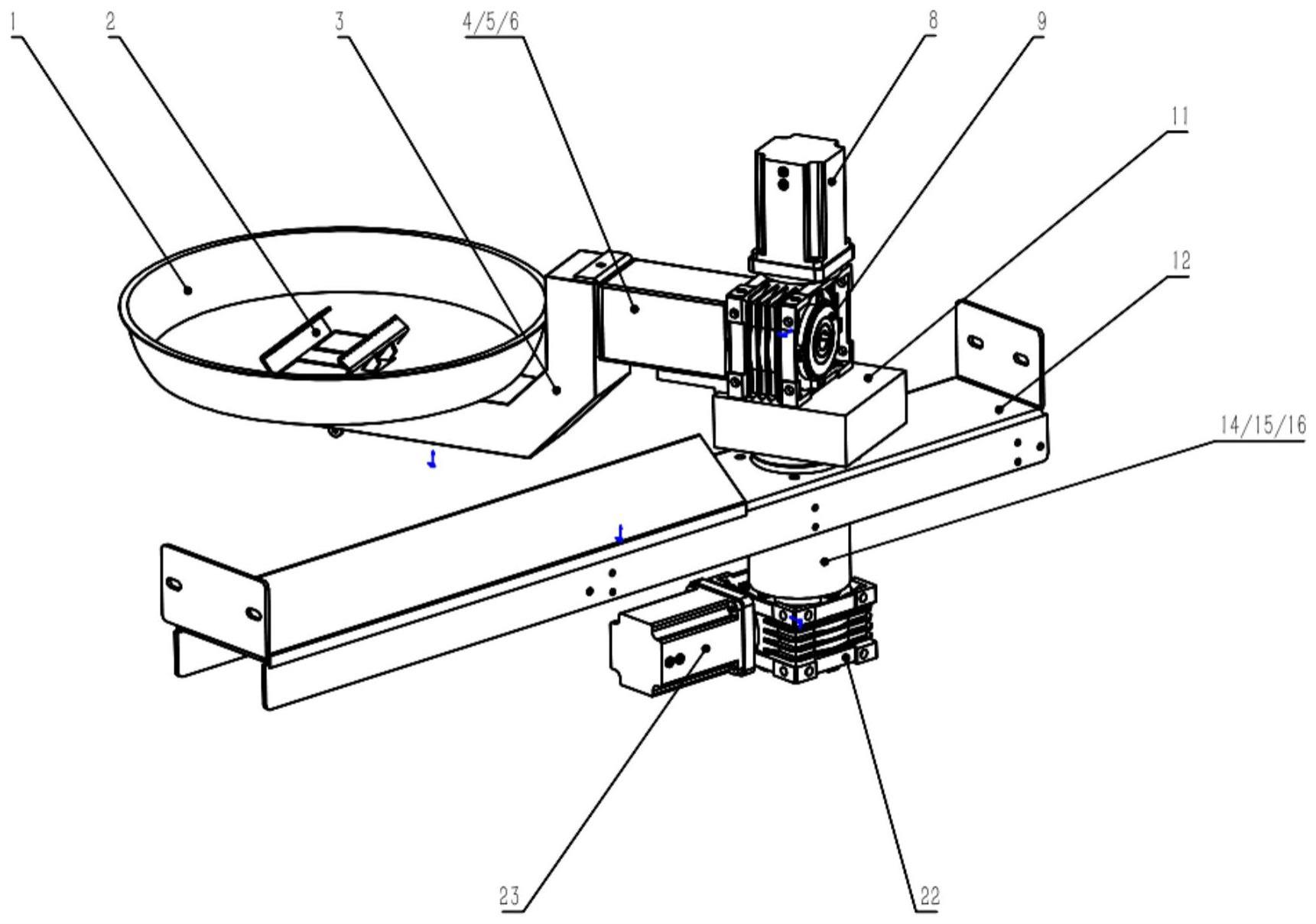
5、一种新型紧凑型厨余垃圾物袋分离机构,包括:托盘(1)、机械夹板机构、动力动作机构;
6、所述机械夹板机构安装于托盘(1)上,具有分合功能用于夹持垃圾塑料袋;
7、所述动力动作机构为多动力传动结构,包括翻转动作机构和旋转动作机构;所述翻转动作机构用于驱动切换托盘(1)翻转,更换姿态;所述旋转动作机构用于驱动翻转动作机构携带托盘(1)、机械夹板机构旋转和切换,更换处于不同的空间位置;通过翻转动作机构和旋转动作机构与机械夹板机构之间工作的配合,达到物袋分离,分别投放的效果。
8、进一步地,所述托盘(1)、机械夹板机构,在托盘底部设有托盘动力臂固定基座(3),在所述托盘动力臂固定基座(3)水平方向的末端连接至翻转动作机构;
9、所述托盘(1)、机械夹板机构都固定于托盘动力臂固定基座(3)上;
10、所述托盘设有安装孔;
11、进一步地,所述机械夹板机构包括两块机械夹板(2)、主动齿(17)、从动齿(18)、两个销(19)、动力装置;
12、所述两块机械夹板(2)穿过安装孔位于托盘(1)内,两块机械夹板(2)开合配合;
13、所述主动齿(17)和从动齿(18)顶端分别与两块机械夹板(2)固定,主动齿(17)和从动齿(18)啮合,并分别限位于各自销(19)转动,形成啮合传动端;
14、所述主动齿(17)还设有施动端,在动力装置作用下所述施动端接受推力的施加/复位,从而调控托盘(1)内两块机械夹板(2)的开合状态;
15、两个销(19)安装固定于托盘动力臂固定基座(3)。
16、进一步地,所述机械夹板机构中的动力装置选择推杆装置,推杆装置连接于施动端;所述机械夹板机构通过推杆装置和主动齿、传动齿的动作实现对垃圾袋的夹紧与释放动作。
17、进一步地,所述推杆装置,选择电子推杆装置(21)。所述电子推杆装置(21)包括缸体(212)和伸出杆(211),伸缩杆211与主动齿(17)施动端形成活动节点(20),伸出杆(211)在缸体(212)内伸缩进而带动主动齿(17)转动,在齿轮的啮合传动下带动从动齿(18)转动,实现两块机械夹板(2)的分开与闭合;缸体(212)安装固定于托盘动力臂固定基座(3)。
18、进一步地,所述机械夹板机构设置于托盘(1)底部中央位置。
19、所述动力动作机构,其翻转动作机构包括;翻转动力电机(8)、翻转减速机(9)、翻转动力输出轴(6)、翻转轴用挡圈(10);其中:所述翻转动力电机(8)与翻转减速机(9)输入端相连,翻转减速机(9)输出端与翻转动力输出轴(6)相连,翻转轴用挡圈(10)设置于翻转动力输出轴(6)末端用于限位翻转动力输出轴(6),翻转动力输出轴(6)另一端与托盘动力臂固定基座(3)水平方向的末端固定。
20、进一步地,所述翻转动作机构还包括第一基座(5)、第一轴承(4),第一基座(5)为壳体状结构,其长度方向内设置翻转动力输出轴(6),其径向内设置第一轴承(4),所述翻转动力输出轴(6)输出端连接第一轴承(4)。
21、进一步地,所述翻转动作机构还包括翻转基座(11);翻转动作机构中的翻转动力电机(8)、翻转减速机(9)、壳体状的第一基座(5)都可以固定于翻转基座(11)。所述翻转动作机构是通过翻转基座(11)连接至旋转动作机构的。
22、所述动力动作机构,其旋转动作机构包括旋转动力电机(23)、旋转减速机(22)、旋转动力输出轴(16)、旋转轴用挡圈(24);其中:所述旋转动力电机(23)与旋转减速机(22)输入端相连,旋转减速机(22)输出端与旋转动力输出轴(16)相连,旋转轴用挡圈(24)设置于旋转动力输出轴(16)末端用于限位旋转动力输出轴(16)。
23、进一步地,所述旋转动作机构还包括旋转基座(15)、第二轴承(13),旋转基座(15)为壳体状结构,其长度方向内设置旋转动力输出轴(16),其径向内设置第二轴承(13),所述旋转动力输出轴(16)输出端连接第二轴承(13)。
24、进一步地,所述旋转动作机构还包括机构固定基座(12)、轴套(14),其中,所述机构固定基座(12)用于将本实用新型机构整体安装于应用场景的结构件上,应用中需将机构固定基座(12)上开通孔,所述轴套(14)安装于机构固定基座(12)的通孔内,所述旋转动力输出轴(16)与机构固定基座(12)中间通过轴套(14)连接。旋转动作机构中的转动力电机(23)、旋转减速机(22)、壳体状的旋转基座(15)都可以固定于机构固定基座(12)上。
25、所述机构固定基座(12)安装于外部结构件上,用于承重翻转动作机构和旋转动作机构;机构固定基座(12)设有开孔,旋转动作机构与机构固定基座(12),其旋转动力电机(23)、旋转减速机(22)位于机构固定基座(12)下部,旋转动力输出轴(16)穿过该开孔与翻转基座(11)连接;翻转动作机构的翻转动力电机(8)、翻转减速机(9)固定于翻转基座(11)上。
26、动力动作机构的工作方式:
27、翻转动作:所述翻转减速机(9)在翻转动力电机(8)的驱动下,将动力传送到翻转动力输出轴(6),翻转动力输出轴(6)带动托盘(1)一起进行水平方向上的翻转以改变托盘(1)姿态;旋转动作:所述旋转减速机(22)在旋转动力电机(23)的驱动下,将动力传送到旋转动力输出轴(16),旋转动力输出轴(16)带动翻转基座(11)一起进行水平方向上的正向和逆向旋转以改变托盘(1)空间位置。
28、进一步地,所述新型紧凑型厨余垃圾塑料袋回收机构,初始状态时,托盘朝上,水平方向与正面面板的夹角为30度;投放垃圾时托盘在机械夹板机构和动力动作机构带动下分别执行四个动作:
29、第一步,两块机械夹板(2)闭合,翻转动力输出轴(6)带动托盘在轴向方向旋转180度,使托盘面朝向厨余垃圾桶,投放厨余垃圾;
30、第二步,旋转动力输出轴(16)带动托盘在水平方向顺时针旋转120度,托盘正面朝下不动,位于其它垃圾桶上方;
31、第三步,两块机械夹板(2)分开,投放垃圾袋;
32、第四步,旋转动力输出轴(16)带动托盘进行水平方向逆时针方向旋转120度,使托盘位于厨余垃圾桶上方,并使托盘恢复初始的朝上状态。
33、进一步地,所述新型紧凑型厨余垃圾物袋分离机构,安装于厨余垃圾桶(26)和其它垃圾桶(25)之间,并置于厨余垃圾桶(26)和其它垃圾桶(25)之上。
34、进一步地,还包括垃圾导流板(29),所述垃圾导流板(29)安装在厨余垃圾桶(26)和其它垃圾桶(25)之间,防止托盘水平方向运动时有垃圾掉落在非垃圾桶区。
35、本实用新型与接近现有技术cn217674714u相比,具有如下新颖性、优化设计:
36、1、所述托盘动力臂固定基座3采用凹式设计,与其它功能件上形成功能和空间配合,在应用场景中最大化利用好空间。
37、2、所述动力动作机构中两个机构(翻转动作机构、旋转动作机构)采用了空间集约设计,一方面两者独立运动于两个维度,另一方面体现在连接关系的设计上,即翻转动作机构所在运动维度上的翻转基座(11)设置在的旋转动作机构所在运动维度直线上。因此,传力机制简单、明确、高效,空间简约。
- 还没有人留言评论。精彩留言会获得点赞!