一种圆环形吊带绕丝机的制作方法
本技术涉及软吊具生产加工设备领域,特别是涉及一种圆环形吊带的绕丝机。
背景技术:
1、在起重吊装领域,由于圆环吊带具有柔性高,成本低,承载强,易收纳等特点,因此具有广泛的应用范围。圆环吊带生产时需要进行绕丝,目前关于圆环吊带绕丝方面的设备机械化自动化程度低,因此现有技术仍采用人工绕丝,致使产品绕丝质量参差不齐、产品寿命低、成本高。
2、有鉴于此,如何提供一种用于圆环吊带绕丝的机械化、自动化设备是本领域人员亟需解决的一个技术问题。
技术实现思路
1、本实用新型的目的是提供一种圆环形吊带的绕丝机,以解决现有技术存在的问题,可实现圆环吊带绕丝机械化、自动化。
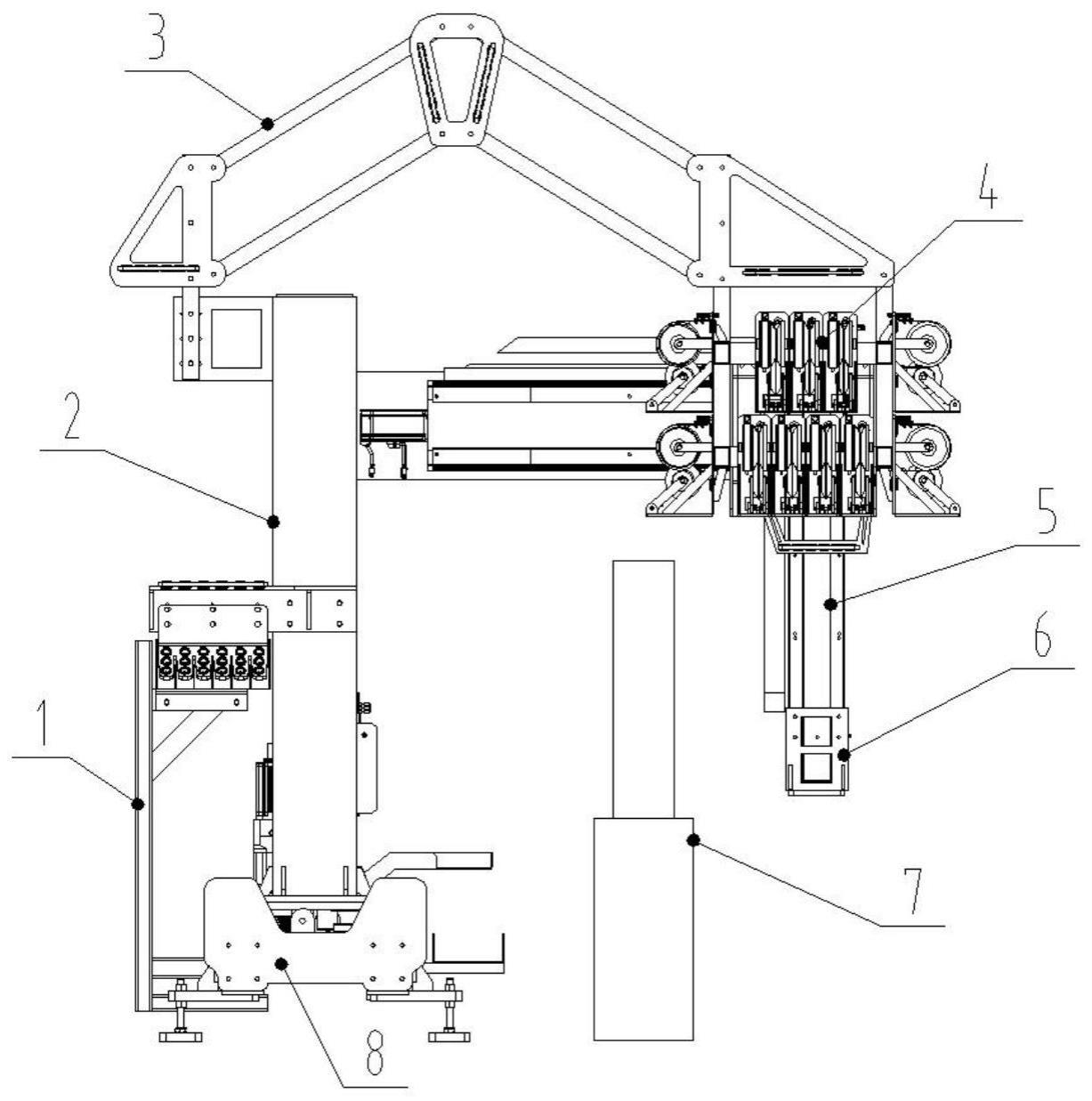
2、为实现上述目的,本实用新型提供了如下方案:本实用新型提供一种圆环形吊带的绕丝机,包括:
3、y轴地轨;
4、机械臂,所述机械臂与所述y轴地轨滑动连接;
5、丝线盒组,所述丝线盒组与所述y轴地轨相邻设置,所述机械臂的接线端与所述丝线盒组对应;
6、横纵运动组,所述横纵运动组包括x轴滑轨、z轴滑轨和连接板,所述z轴滑轨与所述x轴滑轨滑动连接,所述连接板与所述z轴滑轨滑动连接,所述机械臂与所述x轴滑轨的后侧面固定连接;
7、阻尼模块,所述阻尼模块固定安装在所述连接板上,所述阻尼模块的出线端与吐丝件对应;
8、连接组,所述连接组的两端头固定设置在所述机械臂和所述阻尼模块上,所述连接组的接线端与所述机械臂的出线端对应,所述连接组的出线端与所述阻尼模块的接线端位置对应,丝线从所述丝线盒组依次经过所述机械臂、所述连接组和所述阻尼模块并从所述吐丝件输出。
9、进一步的,所述丝线盒组包括:
10、线盒,所述线盒内均匀间隔设置有多个线槽;
11、第一孔板,所述第一孔板设置于所述线盒的一端,所述第一孔板开设有多个第一瓷眼,多个所述第一瓷眼与多个所述线槽一一对应;
12、支撑架,所述支撑架固定设置于所述线盒的底端。
13、进一步的,所述机械臂包括:
14、大臂,所述大臂与所述y轴地轨滑动连接;
15、第二孔板,所述第二孔板与所述大臂固定连接,所述第二孔板开设有多个第二瓷眼,所述第二孔板倾斜卡入多个所述线槽内且多个所述第二瓷眼与多个所述线槽一一对应;
16、第三孔板,所述第三孔板与所述大臂固定连接,其水平设置并位于所述第二孔板的上方,所述第三孔板开设有多个第三瓷眼,多个所述第三瓷眼与多个所述第二瓷眼一一对应;
17、小臂,所述小臂与所述x轴滑轨的后侧面固定连接。
18、进一步的,所述y轴地轨包括:地轨主体和运动平台,所述运动平台与所述地轨主体滑动连接,所述机械臂的底端与所述运动平台固定连接。
19、进一步的,所述连接组包括:
20、小三角板,所述小三角板固定设置在所述机械臂的上端;
21、第四孔板,所述第四孔板固定设置在所述小三角板上,所述第四孔板上开设有多个第四瓷眼,多个所述第四瓷眼与多个所述第三瓷眼一一对应;
22、梯形板,所述梯形板位于所述小三角板的上方,所述梯形板的两个侧边上分别设置有一个第五孔板,所述第五孔板上开设有多个第五瓷眼,两个所述第五孔板的第五瓷眼能够改变丝线的输送方向;
23、大三角板,所述大三角板固定设置在所述阻尼模块上,所述梯形板通过连杆分别与所述小三角板和大三角板铰接;
24、第六孔板,所述第六孔板固定设置在所述大三角板上,所述第六孔板上开设有多个第六瓷眼;两个所述第五孔板的多个第五瓷眼分别和多个所述第四瓷眼以及多个所述第六瓷眼一一对应。
25、进一步的,所述阻尼模块包括:
26、框架,所述框架与所述连接板固定连接;
27、阻尼单元,所述阻尼单元有多个并安装在所述框架内;
28、第七孔板,所述第七孔板与所述框架固定连接并设置于所述阻尼单元的底部,所述第七孔板上开设多个第七瓷眼,多个所述阻尼单元的出线端与多个所述第七瓷眼一一对应。
29、进一步的,所述阻尼单元包括:
30、主体架,所述主体架具有底面和侧面,所述主体架的侧面与所述框架固定连接,所述主体架的侧面分别设置有上瓷眼和下瓷眼;
31、压轮,所述压轮靠近所述主体架的底面设置,所述压轮与所述主体架弹性铰接;
32、槽轮,所述槽轮位于所述压轮的上方并固定在所述主体架的侧面,所述压轮具有向所述槽轮靠近的弹性趋势,丝线从所述上瓷眼进入主体架内,沿所述槽轮顺时针缠绕一周后由所述下瓷眼走出所述主体架。
33、进一步的,还包括摆臂,所述主体架的底面设置有连接耳,所述连接耳上设置有第一销孔,所述摆臂通过第一销轴与所述第一销孔铰接,通过第二销轴与所述压轮铰接,所述第一销轴上设置有双扭簧,所述双扭簧的扭力臂分别与所述主体架的底面以及所述摆臂固定连接,所述双扭簧具有使所述压轮靠近所述槽轮的弹性趋势。
34、进一步的,还包括刹车带,所述槽轮外同轴设置有连接轮,所述刹车带绕设于所述连接轮上,所述刹车带靠下的一端与所述主体架侧面上的钩子固定连接,靠上的一端通过压簧和压簧螺栓与所述主体架的侧面固定连接。
35、进一步的,所述吐丝件上开设有多个第八瓷眼,多个所述第八瓷眼与所述阻尼模块的出线端位置对应。
36、本实用新型公开了以下技术效果:
37、1.机械臂结合y轴地轨以及具有x轴滑轨、z轴滑轨的横纵运动组能够实现三向动力输出,可实现圆环吊带绕丝机械化、智能化,能够精准控制绕丝速度、绕丝距离、绕丝根数和张紧度,绕丝质量高,可适配的圆环吊带范围大,后期具有良好的智能化、数字化拓展性。
38、2.每根丝线都采用独立传输和阻尼控制的方式,保证绕丝过程中,每根丝线都具有充足且可控的张紧度,保证圆环吊带绕线均匀,进而保证了圆环吊带的质量。
39、3.阻尼模块靠近吐丝件设置,对整体丝线的阻尼响应及时,且不受丝线传输过程中摩擦力或张紧力影响。
40、4.阻尼单元采用弹性压轮与槽轮进行阻尼控制,弹性压轮使得阻尼单元的阻尼力具有可调节性,能够对不同直径的丝线进行阻尼控制,也能够使丝线接头通过,具有高防脱性。绕丝过程中,能够进行换丝、续丝、减小或增加丝线的使用根数,无需重新穿丝。
41、5.丝线传输过程中经过多个瓷眼,瓷眼相比于丝线来说内径较大,对于不同直径的丝线具有很好的通过性、适应性,且各个丝线阻尼力控制互不干扰;且瓷眼具有很高的受力过载能力和稳定性,这样设计易于穿丝、维护和更换。
42、6.连接组一端与机械臂固定,另一端与横纵运动组固定,且连接组内部采用连杆铰接,因此当横纵运动组沿x轴和z轴移动时,连接组可保证机械臂出线端与阻尼模块接线端之间的丝线始终保持张紧状态,不会因横纵运动组移动而产生丝线松弛的情况。
43、7.压轮以丝线穿入方向的逆向角度压紧槽轮,可以实现不因为槽轮转速的变化而影响压轮的压紧力。
- 还没有人留言评论。精彩留言会获得点赞!