取放货装置、货架设备及仓储系统的制作方法
本技术实施例涉及物流仓储,具体涉及一种取放货装置、货架设备及仓储系统。
背景技术:
1、随着科技的不断发展,物流仓储系统在各个领域成为了不可或缺的一部分,而随着生活节奏的加快以及人工成本的增高,仓储系统的自动化程度直接影响着运输的效率和成本。
2、目前,自动化的物流仓储系统当中,大多采用取放货机器人实现在货架上的取放货作业,但是在仓库当中,由于货架数量多,机器人通道宽度有限,若配置较多的取放货机器人,一方面成本高,另一方面机器人的移动会相互之间影响,若配置较少的取放货机器人,则会影响取放货作业的效率。
技术实现思路
1、鉴于上述问题,本技术实施例提供了一种取放货装置、货架设备及仓储系统,能够在降低成本的同时,提高取放货作业的效率。
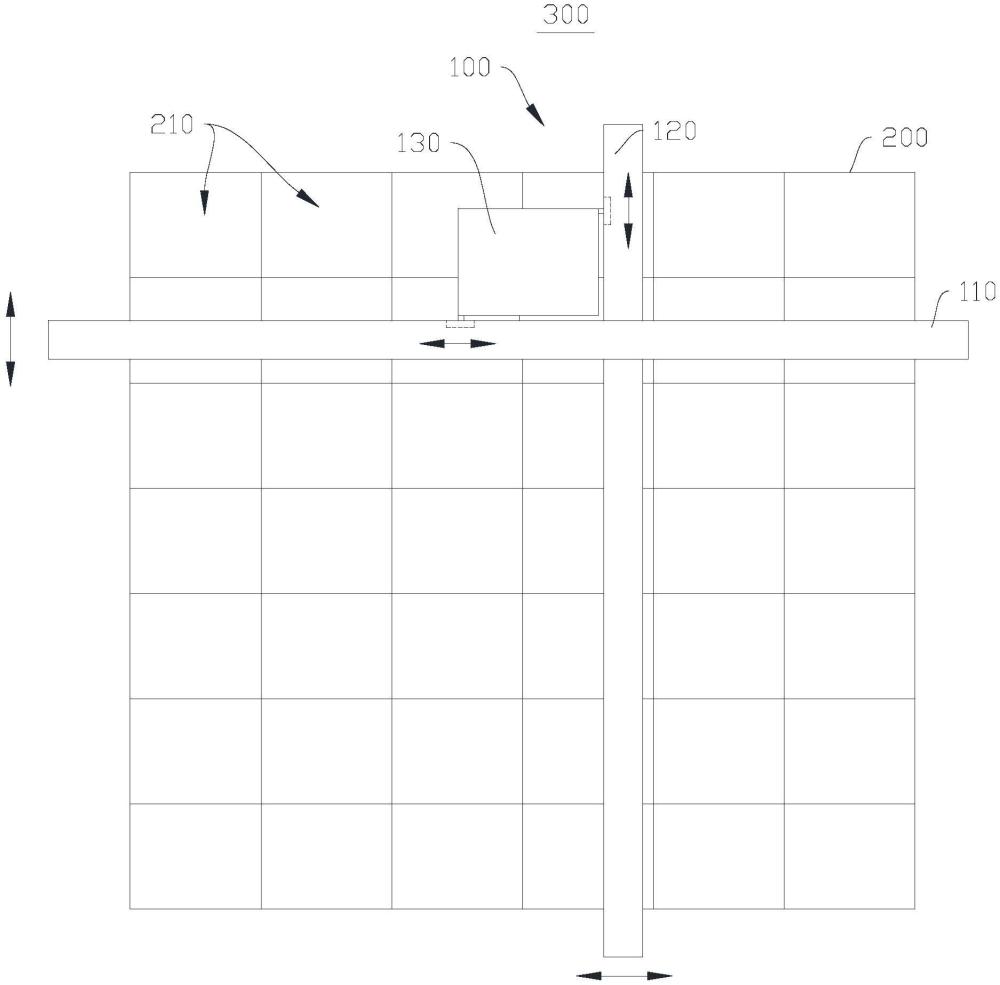
2、根据本技术实施例的一个方面,提供一种取放货装置,包括:横向轨道、纵向轨道和取放货组件;横向轨道用于沿竖直方向可移动安装在货架进行取放货作业的一侧,纵向轨道用于沿水平方向可移动安装在货架进行取放货作业的一侧;取放货组件沿竖直方向的一侧与横向轨道可移动连接,使得取放货组件可沿水平方向在横向轨道上移动,并且取放货组件可与横向轨道在竖直方向上同时移动;取放货组件沿水平方向的一侧与纵向轨道可移动连接,使得取放货组件可沿竖直方向在纵向轨道上移动,并且取放货组件可与纵向轨道在水平方向上同时移动。
3、在一种可选的方式中,取放货装置还包括第一驱动组件,第一驱动组件与横向轨道连接,用于驱动横向轨道沿竖直方向移动。
4、在一种可选的方式中,第一驱动组件包括第一驱动电机、第一啮合轮和第一条形啮合部;第一驱动电机固定于横向轨道的一端;第一条形啮合部沿竖直方向延伸设置,第一条形啮合部用于安装在货架进行取放货作业的一侧;第一驱动电机通过第一啮合轮与第一条形啮合部相啮合,使得第一驱动电机带动第一啮合轮转动时,横向轨道沿竖直方向移动;或,
5、第一驱动组件包括第二驱动电机、第一主动轮、第一从动轮和第一柔性传动件;第二驱动电机、第一主动轮和第一从动轮用于安装在货架进行取放货作业的一侧,第二驱动电机与第一主动轮连接,第一主动轮和第一从动轮沿竖直方向相对设置;第一柔性传动件连接于第一主动轮和第一从动轮之间;横向轨道的一端与第一柔性传动件固定连接,使得第二驱动电机带动第一柔性传动件移动时,横向轨道沿竖直方向随之移动;或,
6、第一驱动组件包括第三驱动电机和第一丝杆;第三驱动电机和第一丝杆用于安装在货架进行取放货作业的一侧,第一丝杆沿竖直方向延伸设置;横向轨道的一端套接于第一丝杆上且与第一丝杆螺纹配合,使得第三驱动电机带动第一丝杆转动时,横向轨道随之移动;或,
7、第一驱动组件包括第一驱动推杆,第一驱动推杆的主体部用于安装在货架进行取放货作业的一侧,第一驱动推杆的推杆部与横向轨道的一端固定连接,第一驱动推杆沿竖直方向延伸设置,使得第一驱动推杆的推杆部伸缩时,带动横向轨道沿竖直方向移动。
8、在一种可选的方式中,取放货装置还包括第二驱动组件,第二驱动组件与纵向轨道连接,用于驱动纵向轨道沿水平方向移动。
9、在一种可选的方式中,第二驱动组件包括第四驱动电机、第二啮合轮和第二条形啮合部;第四驱动电机固定于纵向轨道的一端;第二条形啮合部沿水平方向延伸设置,第二条形啮合部用于安装在货架进行取放货作业的一侧;第四驱动电机通过第二啮合轮与第二条形啮合部相啮合,使得第四驱动电机带动第二啮合轮转动时,纵向轨道沿水平方向移动;或,
10、第二驱动组件包括第五驱动电机、第二主动轮、第二从动轮和第二柔性传动件;第五驱动电机、第二主动轮和第二从动轮用于安装在货架进行取放货作业的一侧,第五驱动电机与第二主动轮连接,第二主动轮和第二从动轮沿水平方向相对设置;第二柔性传动件连接于第二主动轮和第二从动轮之间;纵向轨道的一端与第二柔性传动件固定连接,使得第五驱动电机带动第二柔性传动件移动时,纵向轨道沿水平方向随之移动;或,
11、第二驱动组件包括第六驱动电机和第二丝杆;第六驱动电机和第二丝杆用于安装在货架进行取放货作业的一侧,第二丝杆沿水平方向延伸设置;纵向轨道的一端套接于第二丝杆上且与第二丝杆螺纹配合,使得第六驱动电机带动第二丝杆转动时,纵向轨道随之移动;或,
12、第二驱动组件包括第二驱动推杆,第二驱动推杆的主体部用于安装在货架进行取放货作业的一侧,第二驱动推杆的推杆部与横向轨道的一端固定连接,第二驱动推杆沿水平方向延伸设置,使得第二驱动推杆的推杆部伸缩时,带动纵向轨道沿水平方向移动。
13、在一种可选的方式中,横向轨道具有第三条形啮合部,取放货组件上设置有第七驱动电机,第七驱动电机通过第三啮合轮与第三条形啮合部相啮合,使得第七驱动电机带动第三啮合轮转动时,取放货组件在横向轨道上沿水平方向移动;或,
14、取放货装置还包括第八驱动电机,第八驱动电机用于沿竖直方向可移动安装在货架进行取放货作业的一侧;横向轨道为第三丝杆,第三丝杆的一端与第八驱动电机连接;取放货组件套接于第三丝杆上并与第三丝杆螺纹配合,使得第八驱动电机带动第三丝杆转动时,取放货组件在第三丝杆上沿水平方向移动。
15、在一种可选的方式中,纵向轨道具有第四条形啮合部,取放货组件上设置有第九驱动电机,第九驱动电机通过第四啮合轮与第四条形啮合部相啮合,使得第九驱动电机带动第四啮合轮转动时,取放货组件在纵向轨道上沿竖直方向移动;或,
16、取放货装置还包括第十驱动电机,第十驱动电机用于沿水平方向可移动安装在货架进行取放货作业的一侧;纵向轨道为第四丝杆,第四丝杆的一端与第十驱动电机连接;取放货组件套接于第四丝杆上并与第四丝杆螺纹配合,使得第十驱动电机带动第四丝杆转动时,取放货组件在第四丝杆上沿竖直方向移动。
17、根据本技术实施例的另一个方面,提供一种货架设备,包括货架和如上任一项中的取放货装置,取放货装置用于在货架上进行取放货作业。
18、在一种可选的方式中,货架具有多个用于容置货箱的仓位,仓位沿水平方向及竖直方向阵列设置;取放货装置用于在任意仓位进行取放货作业。
19、根据本技术实施例的另一个方面,提供一种仓储系统,包括上述任一项中的货架设备。
20、本技术实施例提供的取放货装置在将横向轨道沿竖直方向可移动设置,将纵向轨道沿水平方向可移动设置的同时,利用取放货组件与横向轨道沿水平方向滑动连接,沿竖直方向相对固定的特性,以及取放货组件与纵向轨道沿竖直方向滑动连接,沿水平方向相对固定的特性,使得取放货装置可以产生以下运动关系:横向轨道沿竖直方向带动取放货组件移动的同时取放货组件相对于纵向轨道沿竖直方向移动,纵向轨道沿水平方向带动取放货组件移动的同时取放货组件相对于横向轨道沿水平方向移动,在这两种运动关系结合的基础上,取放货组件可以移动至货架的任意仓位处进行取放货作业。进一步地,本技术实施例提供的取放货装置所需零部件数量少,结构简单,有利于降低成本,同时满足取放货作业的效率要求。
21、上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,而可依照说明书的内容予以实施,并且为了让本技术的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!