一种二次元缩放机构及多功能氨纶丝饼自动包装机械手的制作方法
本技术涉及氨纶自动包装机械,具体涉及一种二次元缩放机构及多功能氨纶丝饼自动包装机械手。
背景技术:
1、在近几年氨纶行业为提高生产效率,各个工厂陆续引入自动包装、自动落筒等设备,从而实现自动化生产车间。氨纶产品为丝饼,是由成品氨纶丝生产后卷绕在空心纸管上,一个生产工位一次可生产20-24个整串丝饼,整串丝饼经自动落筒或人工落筒后,由转运丝车转运至自动包装卸丝位,再由卸丝机械手从丝车上将氨纶丝饼卸至自动包装线,自动包装线经检测后剔除不合格产品,合格产品进行自动装箱。
2、氨纶丝饼装箱规格一般为多层多丝饼,一箱有多层丝饼,每层丝饼之间需安放丝饼定位隔板,在自动包装滚筒链板流转线上丝饼之间间距与装箱间距不同,所以装箱机械手需要在滚筒链板上抓取丝饼后可缩放,从而提高抓取、装箱效率,且需要有机构实现放置定位隔板的功能。
3、现有技术中公开了一种用于丝饼装箱的多功能机器人用夹具的实用新型专利(cn212606093u),其能够实现缩放抓取丝饼的功能。但是其存在的弊端是只能抓取3×n矩形阵列(3行多列)布置的丝饼,对于行数≥3的矩形阵列丝饼无法实现缩放抓取,使得其应该受到了很大的限制。
技术实现思路
1、为了解决上述问题,本实用新型提出一种二次元缩放机构及多功能氨纶丝饼自动包装机械手,旨在克服现有技术的缺点,实现行数≥3的矩形阵列丝饼的抓取,具体的技术方案如下:
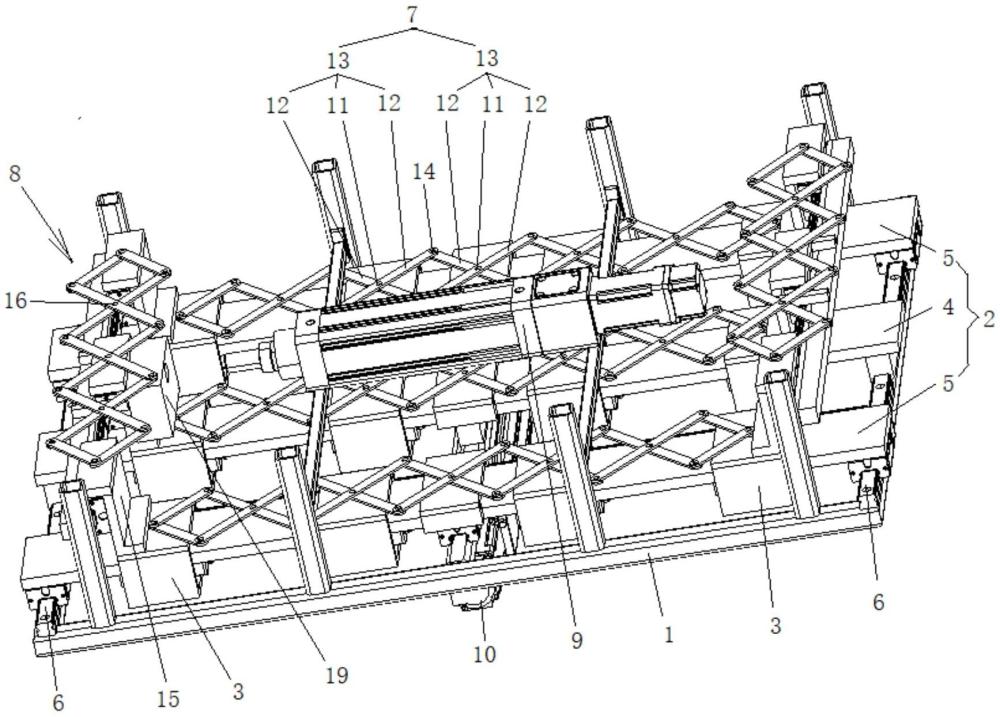
2、一种二次元缩放机构,包括框架、沿所述框架的x方向间隔设置在所述框架上的若干x向轨道、移动设置在所述x向轨道上的若干滑座;所述若干x向轨道中的其中一条x向轨道为与所述框架固定连接的固定式x向轨道,所述若干x向轨道中的其它x向轨道为分置于所述固定式x向轨道两侧的移动式x向轨道,所述移动式x向轨道通过沿所述框架的y方向布置的y向直线导轨移动设置在所述y向直线导轨上;各所述滑座形成矩形阵列布置,且所述矩形阵列布置的各滑座中,位于同一行的所有滑座连接在第一剪叉式伸缩机构上从而实现各所述滑座在x方向位置的同步缩放,至少有一列的所有滑座连接在第二剪叉式伸缩机构上从而实现各所述滑座在y方向位置的同步缩放;在所述框架上还分别设置有用于驱动所述第一剪叉式伸缩机构实现滑座位置在x方向同步缩放的x向伺服驱动机构、用于驱动所述第二剪叉式伸缩机构实现滑座位置在y方向同步缩放的y向伺服驱动机构。
3、优选的,所述x向轨道上设置有x向直线导轨,所述滑座移动设置在所述x向直线导轨上。
4、优选的,所述第一剪叉式伸缩机构包括由若干对通过第一中心铰轴实现交叉转动连接的连杆所形成的x形剪叉,相邻两对x形剪叉在连杆的端部通过杆端铰轴实现转动连接,所述矩形阵列布置的各所述滑座对应地与所述第一剪叉式伸缩机构上的第一中心铰轴实现转动连接。
5、优选的,所述第一剪叉式伸缩机构中,由若干对依次连接的x形剪叉所形成的x形剪叉组件中,每间隔一个x形剪叉连接一个滑座,两个滑座之间的x形剪叉为不连接任何滑座的空置x形剪叉,且位于所述x形剪叉组件中心位置的一个空置x形剪叉通过第一中心铰轴还定位连接在所述x向轨道上。
6、优选的,所述矩形阵列布置的各滑座中,位于所述矩形阵列两侧位置的两列滑座各自对应连接在所述第二剪叉式伸缩机构上从而实现各所述滑座在y方向位置的同步缩放。
7、优选的,位于所述矩形阵列两侧位置的两列滑座上均向上竖立设置有加高块;所述第二剪叉式伸缩机构包括由若干对通过第二中心铰轴实现交叉转动连接的连杆所形成的x形剪叉,相邻两对x形剪叉在连杆的端部通过杆端铰轴实现转动连接,位于所述矩形阵列两侧位置的两列滑座通过所述加高块对应地与所述第二剪叉式伸缩机构上的第二中心铰轴实现转动连接。
8、通过设置加高块,使得第一剪叉式伸缩机构和第二剪叉式伸缩机构形成上下两层的分层结构,从而消除了第一剪叉式伸缩机构和第二剪叉式伸缩机构在缩放时的相互干涉。
9、优选的,所述第二剪叉式伸缩机构中,由若干对依次连接的x形剪叉所形成的x形剪叉组件中,每间隔一个x形剪叉连接一个滑座,两个滑座之间的x形剪叉为不连接任何滑座的空置x形剪叉。
10、优选的,所述第一剪叉式伸缩机构和第二剪叉式伸缩机构的x形剪叉组件中,位于所述x形剪叉组件两端的x形剪叉可以通过省略掉外侧的一半而形成v型剪叉。
11、优选的,所述加高块为z型加高块。
12、优选的,位于所述矩形阵列两侧位置的两列滑座上还对应连接有沿y方向布置的y向加强型直线滑轨,其中,位于所述固定式x向轨道两端的滑座与所述y向加强型直线滑轨固定连接,位于所述移动式x向轨道两端的滑座移动设置在所述y向加强型直线滑轨上。
13、优选的,所述y向加强型直线滑轨的一侧固定有加强筋。
14、本实用新型中,所述x向伺服驱动机构包括沿x方向布置的x向伺服电缸和设置在所述x向伺服电缸的伸缩杆上的x向推力块,所述x向伺服电缸的主体固定在所述框架上,所述x向推力块固定在位于所述固定式x向轨道上的其中一个滑座上。
15、其中,所述x向伺服电缸的伸缩杆的伸缩方向是沿x方向。
16、优选的,所述x向推力块固定在位于所述固定式x向轨道端部的一个滑座上。
17、本实用新型中,所述y向伺服驱动机构包括沿y方向布置的y向伺服电缸和设置在所述y向伺服电缸的伸缩杆上的y向推力座,所述y向伺服电缸的主体固定在所述框架上,所述y向推力座固定在其中一个移动式x向轨道上。
18、其中,所述y向伺服电缸的伸缩杆的伸缩方向是沿y方向。
19、优选的,所述y向推力座固定在所述移动式x向轨道中位于最边上的一个移动式x向轨道的中部位置。
20、优选的,所述x向伺服电缸固定在所述框架的上部,所述y向伺服电缸固定在所述框架的下部。
21、优选的,所述移动式x向轨道对称分置于所述固定式x向轨道两侧。
22、一种采用二次元缩放机构的多功能氨纶丝饼自动包装机械手,所述二次元缩放机构中矩形阵列布置的各滑座上分别安装有用于在氨纶丝饼装箱时抓放丝饼和丝饼定位隔板的氨纶丝饼装箱工具。
23、所述氨纶丝饼装箱工具包括连接在所述滑座上且为向下竖立设置的加长杆、安装在所述加长杆下端用于抓放丝饼的手指气缸;各所述加长杆连接在所述矩形阵列布置的滑座上后对应地形成矩形陈列布置的加长杆,且在所述矩形阵列布置的加长杆中至少有四个位于矩形阵列角部的加长杆上设置有吸盘固定板,所述吸盘固定板上安装有上下伸缩气缸,所述上下伸缩气缸的伸缩杆下端连接有用于抓放丝饼定位隔板的吸盘。
24、优选的,所述手指气缸可以是二指气缸、三指气缸等自定心多指气缸。
25、本实用新型的一种采用二次元缩放机构的多功能氨纶丝饼自动包装机械手还包括多轴机械手,所述二次元缩放机构的框架上方设置有顶板,所述框架与所述顶板之间连接有支撑杆,在所述多轴机械手的机械臂前端部位与所述顶板的上端部位之间设置有用于实现相互间快速安装连接的快换对接结构。
26、优选的,所述多轴机械手为多轴关节机械手。
27、优选的,所述框架为矩形框架,所述顶板为矩形顶板。
28、本实用新型的有益效果是:
29、第一,本实用新型中的二次元缩放机构及多功能氨纶丝饼自动包装机械手,通过设置相互之间具有关联功能的第一剪叉式伸缩机构和第二剪叉式伸缩机构,实现了行数≥3的矩形阵列丝饼的缩放抓取,由此拓宽了氨纶丝饼自动包装机械手的应用范围;由于横向、纵向均可单独缩放,对于装箱的尺寸自由度高。
30、第二,本实用新型中的二次元缩放机构及多功能氨纶丝饼自动包装机械手,横向、纵向驱动力源均在缩放中心线上,受力均衡。
31、第三,本实用新型中的二次元缩放机构及多功能氨纶丝饼自动包装机械手,横向、纵向均可单独缩放,对于装箱的尺寸自由度高、灵活性好;缩放比例可通过伺服电缸控制,缩放精度高。
32、第四,本实用新型中的二次元缩放机构及多功能氨纶丝饼自动包装机械手,横向、纵向缩放均只需要一个驱动源,制造成本低。
33、第五,本实用新型中的二次元缩放机构及多功能氨纶丝饼自动包装机械手,二次元缩放机构与多轴机械手之间采用快换对接结构,更换快、保养、维修便捷。
- 还没有人留言评论。精彩留言会获得点赞!