装载处理设备的绞盘组件的制作方法
本发明涉及用于在包括布置在网格框架结构中的堆叠容器的自动化存储系统中处理存储容器或箱的机器人装载处理设备的领域,更具体地涉及机器人装载处理设备的绞盘组件。
背景技术:
1、众所周知,存储和取回系统包括三维存储网格框架结构,其中存储容器/箱堆叠在彼此顶部。pct公开第wo2015/185628a号(ocado)描述了一种已知的存储和履行系统,其中箱或容器的堆垛被布置在网格框架结构内。箱或容器通过在位于网格框架结构顶部的轨道上运作的机器人控制的装载处理设备来存取。在附图的图1至图3中示意性地展示了这种类型的系统。
2、如图1和2所示,被称为箱10的可堆叠容器堆叠在彼此顶部以形成堆垛12。出于定义的目的,术语“箱”、“箱子”、“容器”和“存储容器”在说明书中可互换使用以表示相同的特征。堆垛12布置在仓库或制造环境中的网格框架结构14中。网格框架结构由复数个存储柱或网格柱组成。网格框架结构中的每个网格单元具有用于存储容器堆垛的至少一个网格柱。图1是网格框架结构14的示意性立体图,而图2是示出布置在框架结构14内的箱10的堆垛12的俯视图。每个箱10通常容纳复数个产品项目(未示出),并且箱10内的产品项目可以是相同的,或者可以是不同的产品类型,这取决于应用。
3、网格框架结构14包括支撑水平构件18、20的复数个直立构件16。第一组平行水平网格构件18被布置为垂直于第二组平行水平网格构件20,以形成由直立构件16支撑的复数个水平网格单元。构件16、18、20通常由金属制成。箱10被堆叠在网格框架结构14的构件16、18、20之间,使得网格框架结构14防止箱10的堆垛12的水平移动,并引导箱10的竖直移动。
4、网格框架结构14的顶层包括横穿堆垛12的顶部以网格图案布置的轨道或轨路22。另外参见图3,轨路22支撑复数个装载处理设备30。第一组22a平行轨路22引导机器人装载处理设备30在第一方向(例如,x方向)上横穿网格框架结构14的顶部的移动,而布置为垂直于第一组22a的第二组22b平行轨路22引导装载处理设备30在垂直于第一方向的第二方向(例如,y方向)上的移动。以此种方式,轨路22允许机器人装载处理设备30在水平的x-y平面内沿二维横向移动,使得装载处理设备30可以被移动至任意堆垛12上方的位置。
5、图4所示的已知装载处理设备30包括载具主体32,并且在pct专利公开第wo2015/019055号(ocado)中进行了描述,此申请通过引用方式并入本文。此处,装载处理设备30包括轮子组件,轮子组件包括第一组轮子34以及第二组轮子36,第一组轮子34由载具32前部的成对轮子和载具32后部的成对轮子34组成,以用于与第一组轨路或轨道接合来引导设备在第一方向上的移动,第二组轮子36由载具32每侧的成对轮子36组成,以用于与第二组轨路或轨道接合来引导设备在第二方向上的移动。装载处理设备的载具主体包括上部分和下部分。轮子围绕载具主体的下部分中的空腔或凹槽(被称为容器接收凹槽40)的外围布置。如图5所示的装载处理设备包括容器升降机构,容器升降机构包括升降驱动组件或绞盘组件。升降驱动组件或绞盘组件包括绞盘或起重机机构,以将还被称为箱子的存储容器或箱从上方提升,以及包括容器夹持组件或抓取设备39。升降机构位于载具主体的上部分中。抓取设备被形成为包括四个拐角部分的构架。绞盘起重机组件包括卷绕在卷轴或线轴(未示出)上的升降系绳38。通常,绞盘组件包括四个卷轴,四个卷轴中的每个卷轴承载升降系绳,其中升降系绳的一端锚定至卷轴,另一端锚定至抓取设备的拐角。
6、容器夹持组件39被配置为夹持容器10的顶部,以将其从pct专利公开第wo2015/019055号(ocado)所教导类型的存储系统中的容器堆垛中提升。绞盘组件由驱动机构(未示出)驱动,其中驱动机构通常被称为z电机,因为z电机被配置为在提升和降低存储容器时在z方向上抬高和降低容器夹持组件。在驱动机构降低容器夹持组件的运行期间,升降系绳从卷轴中放出。
7、在拾取操作过程中,特别是在与存储容器接合时,容器夹持组件必须始终保持水平,否则,如果遇到不平衡且较高的负荷,保持容器夹持组件的至少一个升降系绳可能会有撕裂的潜在风险。为了具备必要的物理特性(杨氏模量)以承受可重达35kg的存储容器的负荷,升降系绳通常采用带或带子的形式,且通常由金属(通常为钢合金)制成。通常,容器夹持组件被配置为构架,而卷绕在单独卷轴上的四个升降细绳用于将构架悬挂在装载处理设备的主体上。传统上,卷绕在单独卷轴上的升降系绳被布置在装载处理设备的壳体或主体的上层内。四个卷轴中的每个卷轴由单独的电机驱动,以提升和降低容器夹持组件。由于使用单独的电机来驱动四个卷轴会增加重量并提高复杂度,最新的发展趋向于使用单个电机以及使用滑轮系统来抬高和降低容器夹持组件。wo2021/148657(ocado innovationlimited)描述了一种升降驱动组件,其中升降驱动组件包括单个电机以及被配置为传递单个电机产生的旋转以抬高和降低容器夹持组件的复数个正时滑轮、正时皮带和/或齿轮。正时滑轮及其各自的正时皮带经由齿部和对应的沟槽或凹槽接合。在wo2021/148657(ocadoinnovation limited)的一个特定具体实施方式中,描述了一种将单个电机连接至复数个正时滑轮的单个正时皮带。
8、为了确保容器夹持组件保持水平,重要的是所有带子的长度在容器夹持组件运行期间始终保持相同。为了确保锚定至容器夹持组件的所有系绳的长度相等,以使容器夹持组件在运行期间保持水平,每个带子的长度必须在最初以及在各个保养间隔时便进行调整。由于环境、电机磨损、带子拉伸等多种因素,带子会随着时间的推移而拉长或伸长,因此需要进行调整。在其中任意一个带子的长度都不相等的极端情况下,容器夹持组件可能会因为降落过短或者超过容器而无法与容器接合。
9、升降驱动组件本身也会影响容器夹持组件在被抬高和降低时的朝向。当四个升降系绳被锚定至容器夹持组件时,如果将单个电机连接至容器夹持组件的正时滑轮中的任意一个正时滑轮从它们各自滑轮中的一个滑轮滑脱(skip)或跳齿,这将导致承载升降系绳的卷轴中的任意一个卷轴与其他卷轴不同步,即滞后。这反过来又会导致升降系绳中的任意一个升降系绳的卷绕量要比其他卷轴少。当如wo2021/148657(ocado innovationlimited)所述地使用单个皮带将单个电机连接至复数个正时滑轮以用于驱动多个卷轴时,问题会变得更加严重。单个电机施加在正时皮带上的张力会导致皮带拉伸,从而造成正时皮带的部分变得松弛,增加正时皮带从正时滑轮脱离的风险。当升降机构拾取可重达35kg的满负荷的存储容器时,正时皮带拉伸的问题会变得尤为严重,因为在拾取满负荷的存储容器时,单个电机的高扭矩经由正时皮带传递到正时滑轮。由于复数个卷轴由复数个正时滑轮驱动,连接一个或多于一个正时滑轮的正时皮带的滑脱或脱离会导致一个或多于一个升降系绳以不同地方式卷绕在各自的卷轴上,进而导致锚定至升降系绳的容器夹持组件不平稳。在与存储容器接合时,容器夹持组件的不平稳可能会导致存储容器撞到网格框架结构的竖直立柱,并且,在最坏的情况下,存储容器可能会卡在竖直立柱之间。即使设有皮带张紧器来确保在单个电机运行期间维持正时皮带中的张力,皮带张紧器的使用也只能在皮带张紧器所规定的固定的预定张力范围内维持正时皮带的张力。当正时皮带中的张力超过皮带张紧器提供的张力时,皮带拉伸的问题依然存在。
10、为了校正容器夹持组件的不平稳,可能需要通过将卷轴或线轴与其旋转轴分离,并通过线轴或卷轴相对于旋转轴的自由旋转调整带子来消除线轴中的任何松弛现象。当带为想要的长度时,线轴或卷轴随后被安装至旋转轴。这一方法的变形是提供固定至容器夹持组件的可调节的升降带连接器,如wo2019/206438(autostore technology)所教导的。每个可调节的升降连接器包括支架以及带连接器中心。支架被连接至容器夹持组件,并且带连接器中心被连接至支架以及升降带之一,使得带连接器中心相对于支架的移动能够调整容器夹持组件的相应拐角部分与升降带驱动组件之间的竖直距离。
11、因此,本发明的主要目标是提供一种基于单个电机来抬高和降低容器夹持组件并且不会出现上述问题的升降驱动机构。
技术实现思路
1、通过控制在连接至存储箱升降驱动组件的单个电机时处于张力下的正时皮带的部分或区段的长度,本发明已经缓解了上述问题。运用胡克定律,处于张力下的正时皮带的长度越长,正时皮带拉伸的比例越大,导致正时皮带的松弛程度越深,进而增加正时皮带在正时滑轮上滑脱的风险。因此,处于张力下的正时皮带的长度越短,正时皮带拉伸的比例就越小,从而降低正时皮带在正时滑轮上滑脱的风险。由于电机的扭矩在拾取可重达35kg的存储容器时会被传递至正时皮带,因此在抬高容器夹持组件时,正时皮带滑脱造成的问题会比在降低容器夹持组件时更为突出,这主要受重力的影响。
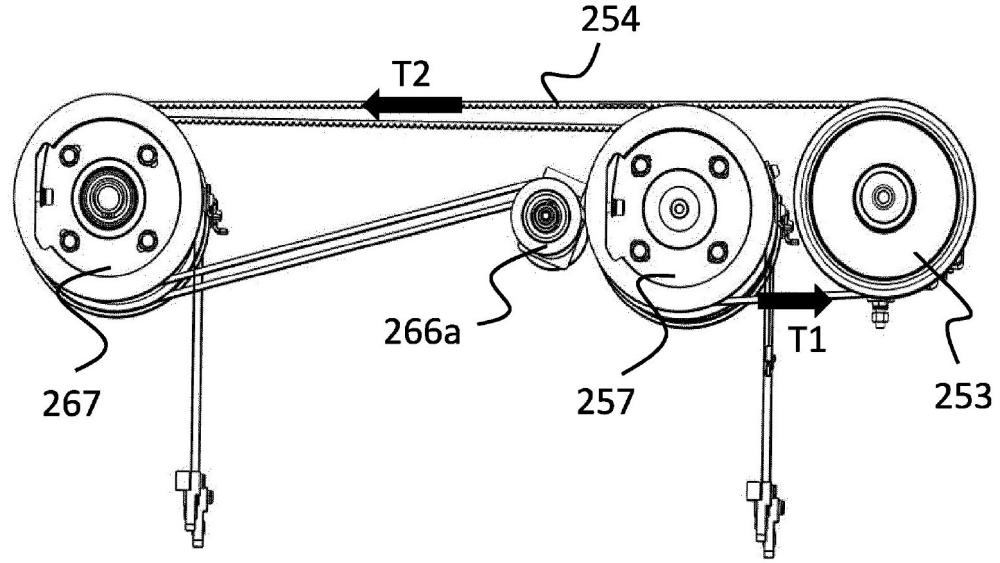
2、为了使正时皮带能够以足够大的包角(wrap angle)经过至少三个正时滑轮,以避免正时皮带的滑脱,设置了皮带张紧轮子或导向轮子来压在正时皮带的背面,迫使正时皮带以蛇形形状贴合在正时滑轮上。皮带张紧轮子被配置为将正时皮带压向正时滑轮,也就是说,在与正时皮带贴合正时滑轮时的切向力垂直的方向上施加力。通过控制皮带张紧轮子或导向轮子相对于滑轮系统中正时滑轮的位置,可以控制施加于正时皮带的不同部分或区段的张力的大小。张力取决于正时滑轮抬高或降低容器夹持组件的旋转方向。皮带张紧轮子与单个电机之间处于张力下的正时皮带的长度越短,正时皮带滑脱的风险就越低,因为在单个电机运行期间,受到拉伸的正时皮带较少。当单个电机朝着单个电机拉动正时皮带时,正时皮带中的张力最大——此时单个电机被配置为抬高容器夹持组件,而皮带张紧轮子被定位,使得正时皮带中的张力集中在皮带张紧轮子与单个电机之间并且在朝着单个电机的方向上移动的正时皮带的区域。由于皮带张紧轮子被配置为将正时皮带压向正时滑轮,在最靠近单个电机的正时滑轮与电机之间并且在朝着单个电机的方向上移动的正时皮带中的张力最大。由于这是正时皮带的小部分,因此,正时皮带这一部分的任何拉伸都是微小的。
3、本发明提供了一种用于提升和移动堆叠在网格框架结构的堆垛中的容器的机器人装载处理设备,网格框架结构包括在容器的堆垛上方在第一方向上延伸的第一组轨道以及在横向于第一方向的第二方向上延伸的第二组轨道,装载处理设备被配置为在堆垛上方的轨道上移动,装载处理设备包括:
4、轮子组件,轮子组件包括第一组轮子以及第二组轮子,第一组轮子用于与第一组轨道接合以引导装载处理设备在第一方向上的移动,第二组轮子用于与第二组轨道接合以引导装载处理设备在第二方向上的移动;
5、轮子定位机构,轮子定位机构用于选择性地使第一组轮子与第一组轨道接合或者使第二组轮子与第二组轨道接合,轮子定位机构被配置为相对于主体抬高或降低第一组轮子或第二组轮子,从而使装载处理设备能够选择性地在第一方向或第二方向上移动横穿网格框架结构的轨道;以及
6、容器升降机构,容器升降机构包括被配置为可释放地夹持存储容器的容器夹持组件,以及被配置为抬高和降低容器夹持组件的升降驱动组件;
7、其中,升降驱动组件包括被配置为在第一旋转方向上抬高容器夹持组件以及在第二旋转方向上降低容器夹持组件(43)的单个电机;
8、第一组卷轴以及第二组卷轴,第一组卷轴和第二组卷轴中的每个卷轴承载升降系绳,升降系绳具有锚定至容器夹持组件的第一端以及锚定至各自卷轴的第二端;
9、驱动滑轮,驱动滑轮与单个电机连接以用于旋转;
10、复数个正时滑轮,复数个正时滑轮与第一组及第二组卷轴以及驱动滑轮连接以用于旋转,使得单个电机被配置为旋转第一组卷轴和第二组卷轴来抬高和降低容器夹持组件;
11、其中,复数个正时滑轮包括第一正时滑轮以及第二正时滑轮,第一正时滑轮和第二正时滑轮通过单个正时皮带连接至驱动滑轮以用于旋转,单个正时皮带围绕第一正时滑轮和第二正时滑轮与驱动滑轮形成闭循环,使得驱动滑轮在相同的旋转方向上驱动第一正时滑轮和第二正时滑轮的旋转;以及
12、其中,第一正时滑轮被布置在驱动滑轮与第二正时滑轮之间,并且其中,升降驱动组件进一步包括被布置在第一正时滑轮与第二正时滑轮之间的皮带张紧轮子,皮带张紧轮子被布置成将单个正时皮带压向第一正时滑轮,以便在单个电机在第一旋转方向上旋转时,使用时在朝着单个电机的方向上移动且在第一正时滑轮与驱动滑轮之间的单个正时皮带的第一部分中的张力要大于在第一正时滑轮与第二正时滑轮之间的单个正时皮带的第二部分中的张力。
13、第一正时滑轮和第二正时滑轮与正时皮带的内表面接触,使得第一正时滑轮和第二正时滑轮(因此还有它们各自的卷轴)在相同的旋转方向上受到驱动。可选地,皮带张紧轮子允许正时皮带以蛇形形状经过第一正时滑轮和第二正时滑轮以及驱动滑轮,进而允许增大正时皮带围绕第一正时滑轮的包角。因此,皮带张紧轮子将单个正时皮带压向第一正时滑轮的区域内的正时皮带可被限定为单个正时皮带的蛇形区域。术语“蛇形正时皮带”和“正时皮带”在说明书中互换使用,表示相同的特征。术语正时皮带可包括橡胶带或链条。优选地,单个正时皮带的第一部分的长度小于皮带第二部分的长度。单个正时皮带的第二部分可以是从第一正时滑轮经由第二正时滑轮到驱动滑轮的单个皮带的任意部分,即从第一正时滑轮绕过第二正时滑轮再到驱动滑轮。这包括第一正时滑轮与第二正时滑轮之间的单个正时皮带的一个区段。
14、正时皮带的第一部分的长度较短,减少了处于张力下的正时皮带的量,并进而降低了正时皮带受到拉伸的比例。对于皮带张紧轮子,存在各种布置来控制正时皮带中的张力,这主要取决于抬高容器夹持组件时卷轴的旋转方向,因为朝着驱动滑轮(驱动滑轮被连接至单个电机以用于旋转)拉动的正时皮带的区段中的张力最大。在一个实施例中,皮带张紧轮子被布置成在第一旋转方向为逆时针方向而第二旋转方向为顺时针方向时将单个正时皮带压向第一正时滑轮的底侧,使得单个正时皮带的第一部分(单个正时皮带的下部分)呈现蛇形形状。在另一实施例中,皮带张紧轮子被布置成在第一旋转方向为顺时针方向而第二旋转方向为逆时针方向时将单个正时皮带压向第一正时滑轮的上侧,使得单个正时皮带的第一部分(单个正时皮带的上部分)呈现蛇形形状。
15、存在不同的布置来将复数个正时滑轮连接至单个电机,以用于驱动第一组卷轴和第二组卷轴的旋转。可选地,第一正时滑轮和第一组卷轴被安装在升降轴上以用于旋转,使得升降轴由第一组卷轴和第一正时滑轮共用。可选地,第二组卷轴中的至少一个卷轴通过由第二正时皮带连接至升降轴而由单个电机驱动。在这一实施例中,第二组卷轴被分别安装在单独的轴上以用于旋转,并通过由正时皮带和第二正时皮带连接至单个电机而受到驱动并旋转。在这一布置中,优选地,升降驱动组件进一步包括安装在升降轴上以用于旋转的第三滑轮,以及连接至第二组卷轴中的至少一个卷轴以用于旋转的第四滑轮,第二正时皮带围绕第三滑轮和第四滑轮形成闭循环,使得升降轴驱动第二组卷轴中的至少一个卷轴的旋转。为了维持第二正时皮带中的张力,优选地,升降驱动组件进一步包括被布置成将第二正时皮带压向第三滑轮的第二皮带张紧轮子。优选地,第二皮带张紧轮子允许增大围绕第三滑轮的第二正时皮带的包角,因此,第二正时皮带围绕第三和第四正时滑轮呈现蛇形形状。
16、在通过单个电机来驱动第一组卷轴和第二组卷轴的另一实施例中,第一组卷轴和第二组卷轴被分别安装在单独的升降轴上,升降轴通过单个正时皮带连接至单个电机。优选地,升降驱动组件进一步包括第二升降轴,此升降轴限定第一升降轴,第二升降轴与第一升降轴基本平行,并且其中,第二组卷轴与第二正时滑轮被安装在第二升降轴上以用于旋转,并且其中,第二升降轴通过由单个正时皮带连接至第一升降轴而由单个电机来旋转。
17、为了控制正时皮带在第一正时滑轮上的包角,优选地,皮带张紧轮子可进行调整,以调整单个正时皮带贴合第一正时滑轮的力,并进而控制正时皮带围绕第一正时滑轮的包角。
18、可选地,容器升降机构包括承载通信电缆的通信卷轴,通信电缆用于向容器夹持组件发送通信信号和/或接收来自容器夹持组件的通信信号,通信电缆具有连接至通信卷轴的第一端以及连接至容器夹持组件的第二端,通信卷轴被安装在升降轴上以用于旋转,以便单个电机被配置为抬高和降低通信电缆的第二端以及容器夹持组件。
19、可选地,机器人装载处理设备包括具有上部分和下部分的载具主体,上部分被配置为存放一个或多于一个运行部件,下部分被布置在上部分下方,下部分包括用于容纳容器的至少部分的容器接收空间。
20、在容器夹持组件与各自卷轴之间延伸的升降系绳中的每个升降系绳的长度基本相等的情况下,为了确保在抬高和降低容器夹持组件时容器夹持组件的朝向基本水平,优选地,单个电机同步驱动第一组卷轴和第二组卷轴。
21、本发明进一步提供了一种存储系统,包括:
22、轨道系统,轨道系统包括第一组平行轨道和第二组平行轨道,第一组轨道在第一方向上延伸,第二组平行轨道在第二方向上延伸,第一方向基本垂直于第二方向,其被布置为包括复数个网格空间或网格单元的网格图案;
23、复数个容器堆垛,复数个容器堆垛位于轨道系统下方,其中,容器堆垛中的每个容器堆垛占据单个网格空间或网格单元;
24、根据本发明的装载处理设备,装载处理设备被布置为在复数个网格空间或网格单元上沿着轨道系统行进,以便在定位于占据网格空间或网格单元的容器堆垛上方时,容器升降机构被配置为从所述容器堆垛中提升至少一个容器。
- 还没有人留言评论。精彩留言会获得点赞!