行星轮式刮板输送机及其控制方法与流程
本发明涉及隧道工程施工,特别地,有关于一种行星轮式刮板输送机及其控制方法。
背景技术:
1、全断面硬岩隧道掘进机(简称tbm)是隧道工程施工的重要装备,被广泛应用于水利隧洞、城市轨道、市政交通和铁路隧道等领域。tbm施工环境一般为硬岩地层,经常发生岩爆、顶部坍塌掉块等现象,导致隧道底部积渣严重,若不及时清理,将导致洞壁喷浆、仰拱块铺设和轨道铺设滞后,制约施工进度。
2、行业内研发了大量隧道清渣装置,代替人工进行清渣作业,有一些方案中采用行星轮式刮板输送机进行积渣清理和输送,但由于掉落渣石的位置、体积等具有不确定性,容易发生偏载或卡滞情况,而现有的行星轮式刮板输送机无法及时发现偏载或卡滞情况而及时处理。
技术实现思路
1、本发明的目的是提供一种行星轮式刮板输送机及其控制方法,以解决现有的行星轮式刮板输送机无法及时发现偏载或卡滞情况而及时处理的技术问题。
2、本发明的上述目的可采用下列技术方案来实现:
3、本发明提供一种行星轮式刮板输送机的控制方法,所述行星轮式刮板输送机具有铲斗、左扒渣组件、右扒渣组件以及输送组件,所述左扒渣组件安装在所述铲斗的左侧区域,所述右扒渣组件安装在所述铲斗的右侧区域,所述输送组件与所述铲斗连接;所述控制方法包括以下步骤:获取所述左侧区域和所述右侧区域的受载比较信息;根据所述受载比较信息,判断所述行星轮式刮板输送机的工作状态是否为偏载状态;采集所述左扒渣组件中液压马达的第一溢流流量、所述右扒渣组件中液压马达的第二溢流流量以及所述输送组件中液压马达的第三溢流流量;根据所述第一溢流流量、所述第二溢流流量以及所述第三溢流流量,判断所述行星轮式刮板输送机是否为卡滞状态;当所述行星轮式刮板输送机的工作状态非偏载状态和卡滞状态,判定所述行星轮式刮板输送机的工作状态为正常状态。
4、本发明的实施方式中,所述获取所述左侧区域和所述右侧区域的受载比较信息,包括以下步骤:采集所述左侧区域的第一受压数据和所述右侧区域的第二受压数据;根据所述第一受压数据和所述第二受压数据,生成所述受载比较信息;或者根据所述第一受压数据计算所述左侧区域的第一渣土重量,根据所述第二受压数据计算所述右侧区域的第二渣土重量;所述受载比较信息包括所述第一渣土重量和所述第二渣土重量的重量差值;或者采集所述左侧区域的第一倾角和所述右侧区域的第二倾角;根据所述第一倾角和所述第二倾角,生成所述受载比较信息。
5、本发明的实施方式中,所述根据所述受载比较信息,判断所述行星轮式刮板输送机的工作状态是否为偏载状态,包括:若所述重量差值大于重量差设定阈值,判定所述行星轮式刮板输送机的工作状态为偏载状态。
6、本发明的实施方式中,所述铲斗通过左抬升结构和右抬升结构与掘进设备连接;当所述工作状态为偏载状态,所述控制方法还包括以下步骤:比较所述第一渣土重量和所述第二渣土重量的大小,确定偏载方向;根据所述重量差值的大小,确定偏载程度;根据所述偏载方向,确定纠偏对象;其中,所述纠偏对象包括所述左扒渣组件的液压马达、所述右扒渣组件的液压马达、所述左抬升结构和/或所述右抬升结构;根据所述偏载程度,确定纠偏量;其中,所述纠偏量包括所述左扒渣组件的液压马达的转速、所述右扒渣组件的液压马达的转速、所述左抬升结构的伸缩量和/或右抬升结构的伸缩量。
7、本发明的实施方式中,所述根据所述第一溢流流量、所述第二溢流流量以及所述第三溢流流量,判断所述行星轮式刮板输送机是否发生卡滞,包括以下步骤:若所述第一溢流流量大于第一流量设定阈值,或者所述第二溢流流量大于第二流量设定阈值,或者所述溢流流量大于第三流量设定阈值,判定所述行星轮式刮板输送机的工作状态为卡滞状态。
8、本发明的实施方式中,当所述工作状态为卡滞状态,所述控制方法还包括以下步骤:比较所述第一溢流流量和所述第一流量设定阈值,所述第二溢流流量和所述第二流量设定阈值,所述溢流流量和第三流量设定阈值,确定解卡对象;其中,所述解卡对象包括所述左扒渣组件的液压马达、所述右扒渣组件的液压马达和/或所述输送组件的液压马达;控制所述解卡对象先反向转动后正向转动。
9、本发明的实施方式中,所述铲斗通过左抬升结构和右抬升结构与掘进设备连接;当所述工作状态为卡滞状态,所述控制方法还包括以下步骤:控制左抬升结构和右抬升结构同时先缓慢地缩短,再快速伸出,而使所述铲斗震荡;控制左抬升结构和右抬升结构快速地往复伸缩且两者的方向相反,而使所述铲斗偏摆。
10、本发明的实施方式中,当所述行星轮式刮板输送机为正常工作状态,所述控制方法还包括:根据所述第一渣土重量和所述第二渣土重量,调节所述左扒渣组件中液压马达的转速、所述右扒渣组件中液压马达的转速以及所述输送组件中液压马达的转速。
11、本发明的实施方式中,所述根据所述第一渣土重量和所述第二渣土重量,调节所述左扒渣组件中液压马达的转速、所述右扒渣组件中液压马达的转速以及所述输送组件中液压马达的转速,包括以下步骤:根据所述第一渣土重量和所述第二渣土重量,计算渣土总重量;根据预设的多个重量范围及其对应的多个转速级别,匹配出与所述渣土总重量相对应的目标转速级别;根据所述目标转速级别,调节所述左扒渣组件中液压马达的转速、所述右扒渣组件中液压马达的转速以及所述输送组件中液压马达的转速。
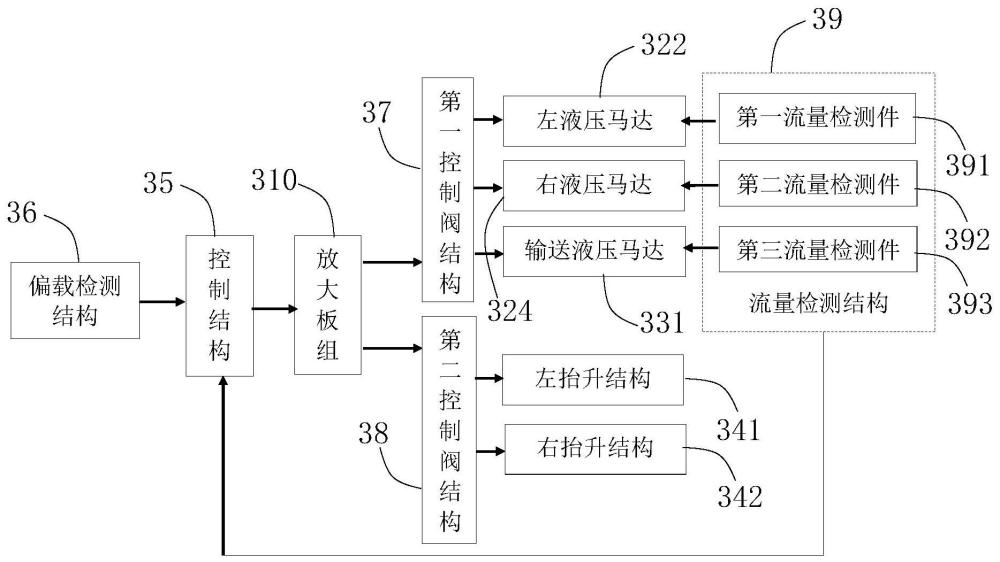
12、本发明还提供一种行星轮式刮板输送机,包括:铲斗;左扒渣组件,安装在所述铲斗的左侧区域并具有用于驱动扒渣的液压马达;右扒渣组件,安装在所述铲斗的右侧区域并具有用于驱动扒渣的液压马达;输送组件,与所述铲斗连接并具有用于驱动输送渣土的液压马达;控制机构,包括控制结构、偏载检测结构以及流量检测结构,所述控制结构分别与所述偏载检测结构以及所述流量检测结构信号连接,所述偏载检测结构安装在所述铲斗上,所述流量检测结构安装在所述左扒渣组件、所述右扒渣组件以及所述输送组件的各液压马达的溢流管路上;其中,所述控制结构能根据所述偏载检测结构的检测信号和所述流量检测结构的检测信号监测所述行星轮式刮板输送机的工作状态。
13、本发明的实施方式中,所述控制机构还包括第一控制阀结构,所述第一控制阀结构包括第一比例换向阀、第二比例换向阀以及第三比例换向阀,所述第一比例换向阀安装在所述左扒渣组件的液压马达的进出油管路上,所述第二比例换向阀安装在所述右扒渣组件的液压马达的进出油管路上,所述第三比例换向阀安装在所述输送组件的液压马达的进出油管路上,所述控制结构分别与所述第一比例换向阀、所述第二比例换向阀以及所述第三比例换向阀信号连接,所述控制结构通过控制所述第一比例换向阀、所述第二比例换向阀以及所述第三比例换向阀而控制所述左扒渣组件、所述右扒渣组件以及所述输送组件的各液压马达的转动。
14、本发明的实施方式中,所述行星轮式刮板输送机还包括左抬升结构和右抬升结构,所述铲斗通过所述左抬升结构和所述右抬升结构与掘进设备连接,所述左抬升结构与所述左扒渣组件同侧设置,所述右抬升结构与所述右扒渣组件同侧设置,所述控制机构能控制所述左抬升结构和右抬升结构能在所述控制机构的控制下伸长而降低所述铲斗的高度以及缩短而抬高所述铲斗的高度。
15、本发明的实施方式中,所述左抬升结构和所述右抬升结构均为油缸,所述控制机构还包括第二控制阀结构,所述第二控制阀结构包括第四比例换向阀以及第五比例换向阀,所述第四比例换向阀安装在所述左抬升结构的进出油管路上,所述第五比例换向阀安装在所述右抬升结构的进出油管路上,所述控制结构分别与所述第四比例换向阀和所述第五比例换向阀信号连接,所述控制结构通过控制所述第四比例换向阀和所述第五比例换向阀而控制所述左抬升结构和所述右抬升结构的伸长和缩短。
16、本发明的实施方式中,所述偏载检测结构包括多个左压力检测件和多个右压力检测件,多个所述左压力检测件和多个所述右压力检测件对称分布于所述铲斗的左侧区域和右侧区域;或者所述偏载检测结构包括倾角传感器,所述倾角传感器安装在所述铲斗的中心位置;
17、所述流量检测结构包括第一流量检测件、第二流量检测件以及第三流量检测件,第一流量检测件安装在所述左扒渣组件的液压马达的溢流管路上,所述第二流量检测件安装在所述右扒渣组件的液压马达的溢流管路上,所述第三流量监测件安装在所述输送组件的液压马达的溢流管路上。
18、本发明的特点及优点是:
19、本发明的行星轮式刮板输送机及其控制方法,通过获取铲斗的左侧区域和右侧区域的受载比较信息,从而能根据左侧区域和右侧区域的受载比较信息判断行星轮式刮板输送机的工作状态是否为偏载状态;通过采集左扒渣组件、右扒渣组件以及输送组件的各液压马达的溢流流量,从而能根据各液压马达的溢流流量判断各液压马达是否发生堵转,也就能判断行星轮式刮板输送机的工作状态是否为卡滞状态;进而可以及时处理消除偏载和卡滞,避免行星轮式刮板输送机因长时间偏载或卡滞而容易损坏,并且有利于提高施工效率。
20、本发明的行星轮式刮板输送机及其控制方法,在偏载状态下,通过根据偏载方向选取左扒渣组件的液压马达、右扒渣组件的液压马达、左抬升结构和/或右抬升结构作为纠偏对象,并根据偏载程度控制左扒渣组件的液压马达的转速、右扒渣组件的液压马达的转速、左抬升结构的伸缩量和/或右抬升结构的伸缩量,从而自动消除偏载。
21、本发明的行星轮式刮板输送机及其控制方法,在卡滞状态下,通过控制发生堵转的液压马达交替地正反转;和/或通过利用左抬升结构和右抬升结构缓慢地收缩后快速地伸出而使铲斗震荡,以及通过左抬升结构和右抬升结构快速地以相反的方向往复伸缩,从而使铲斗偏摆;进而能自动消除卡滞。
- 还没有人留言评论。精彩留言会获得点赞!