一种无人环卫车及其工作方法
本发明属于环卫领域,涉及一种无人环卫车及其工作方法,尤其涉及一种用于社区以及周边道路清洁绿植护理、消毒、垃圾收集分类的清洁车以及基于社区清洁无人车针对于一些特殊路段的会车方法。
背景技术:
1、我国的清扫车在清扫保洁效率、清扫保洁能力、除尘效果和后续的垃圾处理等作业性能方面与发达国家的水平相当,而在清扫保洁车辆的噪声、排放、可靠性、舒适性以及自动调整等方面仍存在差距,特别是全液压清扫车,仅相当于发达国家20世纪产品的水平。目前大部分社区对道路垃圾的清理,主要采用人工清洁,其中针对地面落叶的清理采用人工清扫,该种方式,劳动强度大、效率低,容易造成清理不彻底,也无法进行落叶回收,二次利用。当前我国大部分城市社区小型清洁车的使用功能较为单一,但城市的发展面临的清洁需求却多种多样,例如花丛的清洁、路面灰尘的清理等,小型清洁需要通过功能的多样化进一步提高城市社区清洁工作的效率。
2、随着科技的进步,无人驾驶技术以及传感器技术的进步,许多产品纷纷向智能化,无人化方向靠拢,但我国的城市无人社区小清洁车的智能化应用率却极低。科学技术的使用可以给城市社区居民和清洁带来更好的生活及工作体验。因此亟需一种能够克服以上缺陷的无人社区清洁消杀无人环卫车。
技术实现思路
1、发明目的:本发明的目的是填补已有技术的不足之处,提供一种无人环卫车及其工作方法,具有垃圾清理和后续处理、绿植养护和社区消毒、自动巡航和复杂路段会车功能。
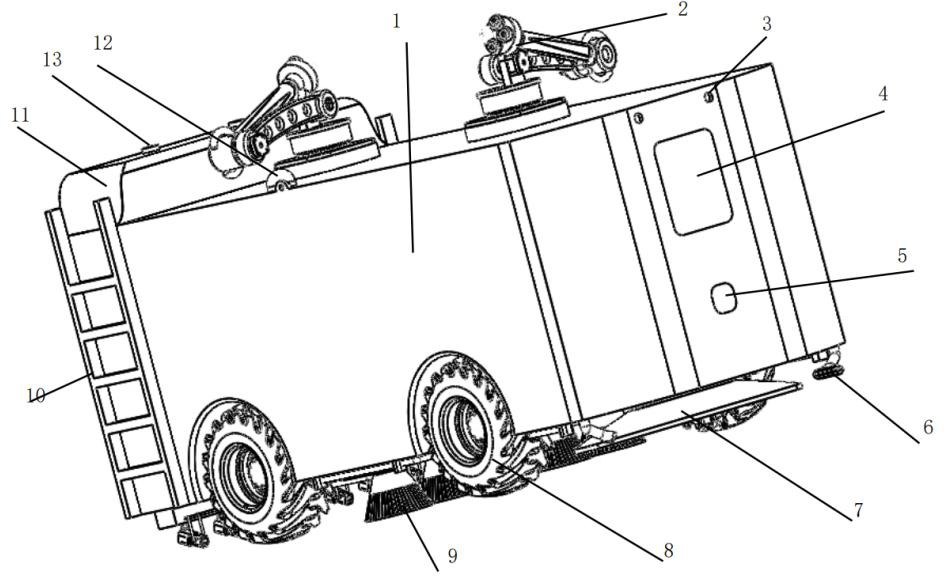
2、技术方案:本发明的无人环卫车包括车体,所述车体中设置有电池、垃圾收集箱及水箱,还包括车顶喷洒装置、高压吹吸装置、路面清扫装置、路面冲洗装置、车底喷雾装置、垃圾分类装置、摄像头、测距测速仪、通信及gps装置以及处理模块;
3、所述水箱上设置有注水注料装置及排水管;所述高压吹吸装置、路面清扫装置、路面冲洗装置及车底喷雾装置设置在所述车体下方,所述路面冲洗装置及车底喷雾装置均通过水管与所述水箱连接;所述高压吹吸装置与所述垃圾分类装置通过管道相连接,所述垃圾分类装置下方设置有垃圾收集箱;
4、所述车顶喷洒装置设置在所述车体的上方,包括可折叠喷洒器及高压泵,所述高压泵通过水管与所述水箱连接;
5、所述摄像头及测距测速仪有多个,分别设置在所述车体的四周,所述测距测速仪与摄像头配合以获取外界车辆、行人以及道路情况等信息,所述通信及gps装置以及处理模块设置在所述车体内部,所述处理模块负责任务执行,所述通信及gps装置负责向工作基站反馈信息。
6、进一步地,所述注水注料装置上设置有清水注水口,所述注水注料装置还包括消毒液储存箱和农药储存箱,在所述消毒液储存箱和农药储存箱上分别设置有消毒液农药入口;所述消毒液储存箱和农药储存箱下面接消毒水农药出水管,所述消毒水农药出水管与所述高压泵相接,同时所述高压泵也与所述水箱相接;所述高压泵的出水口与高压泵出水管相接,所述可折叠喷洒器下部与所述高压出水管相接。
7、进一步地,所述垃圾分类装置包括传送带a、传送带b、分类转盘及垃圾图像采集器;所述垃圾图像采集器设置在所述分类转盘前方,所述传送带a设置在所述高压吹吸装置的连接管道的下方,所述传送带b将传送带a上的垃圾送到分类转盘上,所述分类转盘设置在所述垃圾收集箱上方;所述传送带a包括上传送带和下传送带两部分,所述上传送带和下传送带通过设置速度差实现垃圾分离,所述传送带b上设置有隔板,所述传送带b和所述传送带a之间也具有速度差;所述分类转盘包括上分类转盘及下分类转盘,分别在上控制轮及下控制轮的控制下转动,所述上分类盘上设置有实心区域和空心区域,所述下分类盘上设置有对应的空心区域。
8、进一步地,所述可折叠喷洒器包括底座箱、大臂、小臂,所述大臂通过第一驱动轴与底座箱相固定,使大臂可以绕着第一驱动轴周转运动,大臂通过第二驱动轴与小臂相固定,使小臂可绕着第二驱动轴周转运动,所述小臂上端设置有多选择喷头。
9、进一步地,所述车底喷雾装置包括雾化喷头,所述雾化喷头包括喷室、四头喷头、盲板及旋流片,所述喷室与所述四头喷头通过螺纹固定,所述喷室内固定盲板、旋流片,所述盲板在所述旋流片上方,高速流动的液体撞击在所述盲板、通过所述旋流后形成雾化颗粒,并通过所述四头喷头喷出。
10、进一步地,所述无人环卫车还设置有报警装置。
11、进一步地,本发明提供上述无人环卫车的工作方法,包括:
12、s1:预备工作:检查无人环卫车电量,垃圾收集箱,在相应设备中注入清水、消毒液和农药,设置规划行程路线;
13、s2:行驶途中:通过车载gps、摄像头以及测速测距仪向基站提供无人环卫车的位置信息以及无人环卫车四周的交通情况,做出相应的会车及避让的指示;
14、s3:任务执行:通过前置摄像头、侧边摄像头、后置摄像头观察路边及路面情况,开启相应的工作模式,同时gps实时反馈当前位置,对需要二次清洁的路段进行标记;
15、s4:在完成一趟规划路线后,若有需要二次清洁的路段被标记则自动规划最优路线前往标记点重复步骤s3,若没有则路径清理完成,返回规定停放区域;
16、s5:返回规定停放区域后操作人员进行垃圾清理和充电。
17、进一步地,所述s2中的路况包括狭窄路段、宽敞路段和十字路口;
18、当路况为狭窄路段时,
19、s2101:检测是否有来车,若否,则保持车速通过路口,若是,则
20、s2102:计算来车停靠所需时间并分析是否无人环卫车所需时间短,若否,则来车先行,然后无人环卫车行并通过路口,若是,则
21、s2103:检测来车是否避让,若是,则无人环卫车先行并通过路口,否则来车先行,然后无人环卫车行并通过路口;
22、当路况为宽敞路段时,
23、s2201:检测是否无人环卫车与来车车距变小,若否,则无人环卫车保持车速通过路口,若是,则
24、s2202:减速或者变道然后重复s2201;
25、当路况为十字路口时,
26、s2301:检测是否有信号灯或者交警,若是,则按照指示行车并通过路口,否则,
27、s2302:检测是否来车与无人环卫车的轨迹在时间跨度上有交点,若否,则通过路口,若是,则
28、s2303:分别计算无人环卫车及来车车头通过交点的时间,车尾通过的时间,若满足通过条件,则通过路口,否则调整无人环卫车速度并继续s2302。
29、进一步地,所述s3中,包括:
30、s310:到达任务规划的绿植喷水区域,可折叠喷洒运行;
31、s320:当通过所述前置摄像头发现路面有垃圾时;
32、s330:垃圾清扫完,开启高速旋转刷对路面上的灰尘进行清理,后置摄像头对清扫后的道路识别,若还有垃圾未清扫干净,将该地点进行定位后期进行二次打扫,若无垃圾则不需要定位;
33、s340:当摄像头观察到无人环卫车附近无垃圾但依然有灰尘时,高压气枪和高压吹吸机电机停止工作,无人环卫车底部的雾化喷头依然会工作;当无人环卫车附近既无垃圾也无灰尘时,高压气枪6、高压吹吸机电机21和雾化喷头都会停止工作;
34、s350:在中途所述摄像头识别到具有危险动作的人或者收集到求救相关敏感关键词时,报警灯报警并带有警声,提醒保安人员进行排查并告知位置共享实时画面;
35、s360:当经过社区垃圾收集地等地面有顽固的油渍和垃圾的区域,高压水枪开始对地面进行高强度清洗。
36、进一步地,所述s3中,所述需要二次清洁的路段包括:所述后置摄像头识别到还有垃圾未清扫干净的路段、识别到有疑似遗失物而绕路未清扫的路段;识别到遗失物的同时拍照上传物业
37、有益效果:与现有技术相比,本发明具有如下显著优点:1、可以对社区道路无人清洁:利用采集的信息、提前设计的路径和任务在无人的情况下自动实现社区清洁,消毒,制备护理的过程;2、能依据实际情况自动驾驶:根据采集路况和道路情况,利用定位系统、图像采集系统和处理系统,实现运行预设的轨迹路线,在遇到复杂路况时,可以利用预先设计的会车判断程序实现会车问题的解决,从而减少人力的投入,也提高了无人环卫车对使用场景的包容性;3、实现垃圾分类处理:根据采集的数据,启动垃圾收集分类系统,清扫冲刷地面,利用压力差收集地面垃圾,利用多级传送带结构将堆垃圾分成单个垃圾,利用多个镂空圆盘的相对运动实现垃圾的定点投放;4、内部管道布局和储藏结构,并依据具体需求混合喷洒农药,消毒剂或者清水:采用分离储存结构,水、消毒液和农药分离储存,根据需求进行消毒液,农药或者清水的单一或者同时喷洒,采用双桶结构储存水,储水量加大,单个储水桶结构简单,在运动时整体质量分布更加均匀,可以为管道布置提供空间;5、人机交互屏幕,方便任务过程中对路人信息传达:通过屏幕可以设置无人环卫车的路径规划,具体任务,在执行任务过程中,无人环卫车可以通过屏幕向经过的人传达信息,便于路人预判无人环卫车的行动,减少交通事故发生的可能;6、三轴机械臂扩大了喷洒的范围:三轴机械臂由底座、支撑臂、工作臂和三组轴构成,两个轴向垂直的轴通过板筋连接,安装在底座上,可实现支撑臂在底座上半球面的全覆盖运动,在支撑臂和工作臂间有轴连接,工作臂相对于支撑臂有360度的运动行程,提高了喷洒药水的距离和高度,可以实现折叠收纳,也可以工作时调整角度,方便喷洒工作。
38、综上,本发明的无人环卫车能够解决当前国内无人环卫车的技术方面落后的状况,无人化智能化进行道路和社区环卫,极大的减少人力的投入。
- 还没有人留言评论。精彩留言会获得点赞!