刮板输送机三维空间形态控制方法和装置与流程
本发明涉及刮板输送机控制,尤其涉及一种刮板输送机三维空间形态控制方法和装置。
背景技术:
1、综采装备智能化是煤炭行业高质量可持续发展的关键技术,采煤机和刮板输送机作为采煤工作面核心装备,其智能化水平对煤炭绿色、高效、安全开采起着十分重要的作用。采煤机将刮板输送机作为行走轨道,紧靠煤层依靠牵引机构提高动力往复运动截割煤壁,采煤机与刮板输送机的工作状态紧密相关,刮板输送机的三维工作形态会直接影响采煤机运动的位置与姿态,而采煤机滚筒截割形成的底板,会作为刮板输送机的底板,影响刮板输送机的形态,因此实现采煤机与刮板输送机的协同监测对于刮板输送机形态控制至关重要。
2、目前专利公布号为cn116151043a的专利申请公开了一种刮板输送机位姿反演方法及装置,其通过预设数字孪生技术复刻采煤机与刮板输送机的协同运行数据;根据协同运行数据和预设深度学习模型对刮板输送机进行模型反演,确定刮板输送机的位姿;根据刮板输送机的位姿控制调节采煤机前后滚筒的高度,从而能够准确确定刮板输送机位姿。
3、但是该专利仅通过采煤机与刮板输送机在竖直面的位姿反演,基于反演得到的角度,计算在竖直面的高度,而没有给出采煤机与刮板输送机在水平面的位姿反演关系,因此无法得到刮板输送机的三维空间形态。另外,该专利申请目的是为了得到采煤机经过刮板25%处、50%处、75%处时的采煤机角度数据与该刮板角度之间的位姿反演关系,最后得到的刮板输送机的角度精确度并不高。最后,该专利申请采用了深度学习模型的卷积神经网络,其在采煤工作面下存在如下缺陷:采煤工作面是一个复杂且危险的环境,需要快速做出决策以确保安全和效率,但是深度学习模型由于其复杂的结构和大量的参数,计算量较大,实时性相对较差;在数据需求量上,深度学习方法在训练过程中,需要大量的数据才能获得更好的效果,而在现实采煤工作面的实际工业应用环境下,数据采集和处理成本较高;深度学习模型由于参数较多,容易陷入局部最优解,且训练过程不稳定,但采煤工作面下对于安全稳定需求较高。
技术实现思路
1、有鉴于此,本发明提供一种刮板输送机三维空间形态控制方法和装置,以解决上述提及的至少一个问题。
2、为了实现上述目的,本发明采用以下方案:
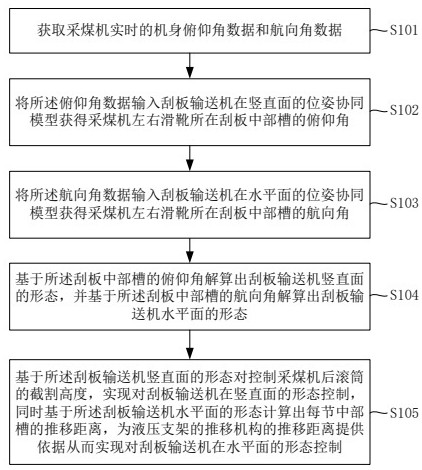
3、根据本发明的第一方面,提供一种刮板输送机三维空间形态控制方法,所述方法包括:获取采煤机实时的机身俯仰角数据和航向角数据;将所述俯仰角数据输入刮板输送机在竖直面的位姿协同模型获得采煤机左右滑靴所在刮板中部槽的俯仰角;将所述航向角数据输入刮板输送机在水平面的位姿协同模型获得采煤机左右滑靴所在刮板中部槽的航向角;基于所述刮板中部槽的俯仰角解算出刮板输送机竖直面的形态,并基于所述刮板中部槽的航向角解算出刮板输送机水平面的形态;基于所述刮板输送机竖直面的形态对控制采煤机后滚筒的截割高度,实现对刮板输送机在竖直面的形态控制,同时基于所述刮板输送机水平面的形态计算出每节中部槽的推移距离,为液压支架的推移机构的推移距离提供依据从而实现对刮板输送机在水平面的形态控制。
4、作为本发明的一个实施例,上述方法中刮板输送机在竖直面和水平面的位姿协同模型通过如下方式建立:通过虚拟仿真采运设备得到采煤机在工作面采煤运行过程中的位姿数据,所述位姿数据包括机身俯仰角和航向角;对所述位姿数据进行预处理得到预处理后的机身俯仰角和航向角数据;将预处理后的机身俯仰角及对应的左右滑靴所在刮板中部槽的俯仰角数据,以及预处理后的机身航向角及对应的左右滑靴所在刮板中部槽的航向角数据作为数据样本,建立基于lssvm算法的非线性回归预测模型来体现采煤机与刮板输送机之间的位姿耦合关系。
5、作为本发明的一个实施例,上述方法中对所述位姿数据进行预处理得到预处理后的机身俯仰角和航向角数据包括:对位姿数据中的异常数据进行剔除;采用线性插值法对剔除异常数据后的位姿数据进行填充,对填充后的位姿数据进行移动平均滤波实现去噪。
6、作为本发明的一个实施例,上述方法中基于所述刮板中部槽的俯仰角解算出刮板输送机竖直面的形态,并基于所述刮板中部槽的航向角解算出刮板输送机水平面的形态包括:
7、基于所述刮板中部槽的俯仰角,利用下式解算出刮板输送机竖直面的形态:
8、;
9、上式中,( x0, z0)为刮板输送机在竖直面的初始刮板坐标;l为每节中部槽的长度;αi为采煤机左右滑靴所在刮板中部槽的俯仰角;
10、基于所述刮板中部槽的航向角,利用下式解算出刮板输送机水平面的形态:
11、;
12、上式中,( x0, y0)为刮板输送机在竖直面的初始刮板坐标;βi为采煤机左右滑靴所在刮板中部槽的航向角。
13、作为本发明的一个实施例,上述方法中基于所述刮板输送机竖直面的形态对控制采煤机后滚筒的截割高度,实现对刮板输送机在竖直面的形态控制包括:
14、基于刮板输送机的俯仰角、采煤机摇臂长度、摇臂与水平面的夹角、采煤机滚筒半径,利用下式得到采煤机后滚筒的截割深度,实现对刮板输送机在竖直面的形态控制:
15、;
16、上式中,α为刮板输送机的俯仰角;i为采煤机摇臂长度,ε为摇臂与水平面的夹角;r为采煤机滚筒半径;hz为采煤机后滚筒的截割深度;h为采煤机机身高度。
17、作为本发明的一个实施例,上述方法中基于所述刮板输送机水平面的形态计算出每节中部槽的推移距离,为液压支架的推移机构的推移距离提供依据从而实现对刮板输送机在水平面的形态控制包括:
18、基于刮板输送机的航向角、每刀采煤循环进度、每节中部槽长度,利用下式得到下一刀刮板运输机在水平面的直线推移补偿量,为液压支架的推移机构的推移距离提供依据从而实现对刮板输送机在水平面的形态控制:
19、 ;
20、上式中,βi为刮板输送机的航向角;h为每刀采煤循环进度;l为每节中部槽长度;hy为下一刀刮板运输机在水平面的直线推移补偿量;n为当前刮板所在位置号。
21、根据本发明的第二方面,一种刮板输送机三维空间形态控制装置,所述装置包括:数据获取单元,用于获取采煤机实时的机身俯仰角数据和航向角数据;竖直面反演单元,用于将所述俯仰角数据输入刮板输送机在竖直面的位姿协同模型获得采煤机左右滑靴所在刮板中部槽的俯仰角;水平面反演单元,将所述航向角数据输入刮板输送机在水平面的位姿协同模型获得采煤机左右滑靴所在刮板中部槽的航向角;解算单元,用于基于所述刮板中部槽的俯仰角解算出刮板输送机竖直面的形态,并基于所述刮板中部槽的航向角解算出刮板输送机水平面的形态;形态控制单元,用于基于所述刮板输送机竖直面的形态对控制采煤机后滚筒的截割高度,实现对刮板输送机在竖直面的形态控制,同时基于所述刮板输送机水平面的形态计算出每节中部槽的推移距离,为液压支架的推移机构的推移距离提供依据从而实现对刮板输送机在水平面的形态控制。
22、作为本发明的一个实施例,上述装置还包括位姿协同模型建立单元,用于建立刮板输送机在竖直面和水平面的位姿协同模型,所述位姿协同模型建立单元具体包括:数据获取模块,用于通过虚拟仿真采运设备得到采煤机在工作面采煤运行过程中的位姿数据,所述位姿数据包括机身俯仰角和航向角;预处理模块,用于对所述位姿数据进行预处理得到预处理后的机身俯仰角和航向角数据;模型建立模块,用于将预处理后的机身俯仰角及对应的左右滑靴所在刮板中部槽的俯仰角数据,以及预处理后的机身航向角及对应的左右滑靴所在刮板中部槽的航向角数据作为数据样本,建立基于lssvm算法的非线性回归预测模型来体现采煤机与刮板输送机之间的位姿耦合关系。
23、作为本发明的一个实施例,上述预处理模块包括:异常数据处理子模块,用于对位姿数据中的异常数据进行剔除;数据填充子模块,用于采用线性插值法对剔除异常数据后的位姿数据进行填充,数据去噪子模块,用于对填充后的位姿数据进行移动平均滤波实现去噪。
24、作为本发明的一个实施例,上述解算单元具体用于:
25、基于所述刮板中部槽的俯仰角,利用下式解算出刮板输送机竖直面的形态:
26、;
27、上式中,( x0, z0)为刮板输送机在竖直面的初始刮板坐标;l为每节中部槽的长度;αi为采煤机左右滑靴所在刮板中部槽的俯仰角;
28、基于所述刮板中部槽的航向角,利用下式解算出刮板输送机水平面的形态:
29、;
30、上式中,( x0, y0)为刮板输送机在竖直面的初始刮板坐标;βi为采煤机左右滑靴所在刮板中部槽的航向角。
31、作为本发明的一个实施例,上述形态控制单元基于所述刮板输送机竖直面的形态对控制采煤机后滚筒的截割高度,实现对刮板输送机在竖直面的形态控制包括:
32、基于刮板输送机的俯仰角、采煤机摇臂长度、摇臂与水平面的夹角、采煤机滚筒半径,利用下式得到采煤机后滚筒的截割深度,实现对刮板输送机在竖直面的形态控制:
33、;
34、上式中,α为刮板输送机的俯仰角;i为采煤机摇臂长度,ε为摇臂与水平面的夹角;r为采煤机滚筒半径;hz为采煤机后滚筒的截割深度;h为采煤机机身高度。
35、作为本发明的一个实施例,上述形态控制单元基于所述刮板输送机水平面的形态计算出每节中部槽的推移距离,为液压支架的推移机构的推移距离提供依据从而实现对刮板输送机在水平面的形态控制包括:
36、基于刮板输送机的航向角、每刀采煤循环进度、每节中部槽长度,利用下式得到下一刀刮板运输机在水平面的直线推移补偿量,为液压支架的推移机构的推移距离提供依据从而实现对刮板输送机在水平面的形态控制:
37、 ;
38、上式中,βi为刮板输送机的航向角;h为每刀采煤循环进度;l为每节中部槽长度;hy为下一刀刮板运输机在水平面的直线推移补偿量;n为当前刮板所在位置号。
39、根据本发明的第三方面,提供一种电子设备,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,处理器执行所述计算机程序时实现上述方法的步骤。
40、根据本发明的第四方面,提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述方法的步骤。
41、根据本发明的第五方面,提供一种计算机程序产品,包括计算机程序/指令,所述计算机程序/指令被处理器执行时实现上述方法的步骤。
42、由上述技术方案可知,本发明提供的刮板输送机三维空间形态控制方法和装置,通过构建得到的位姿协同模型,可以从竖直面和水平面两方面分别获得刮板输送机的形态,从而可以实时的掌握刮板输送机的三维空间形态。而且鉴于本技术可以从竖直面和水平面两方面为智能化采煤工作面安全智能开采精准决策提供数据支持,因而可以更加有效地保障工作面综采设备协调的可靠性和稳定性。
- 还没有人留言评论。精彩留言会获得点赞!