一种用于翻车机的摘钩机器人及摘钩方法与流程
本技术涉及翻车机摘钩,更具体地说,涉及一种用于翻车机的摘钩机器人及摘钩方法。
背景技术:
1、翻车机指一种用来翻卸铁路敞车散料的大型机械设备。可将有轨车辆翻转或倾斜使之卸料的装卸机械,适用于运输量大的港口和冶金、 煤炭、 热电等工业部门。矿井下的矿车也大多用小型翻车机卸车。翻车机可以每次翻卸1-4节车皮。早期的设备只能翻卸1节车皮,最大的翻车机可以翻卸4节车皮,而翻车机在对火车车厢进行翻转之前,需要事先对车厢进行摘钩操作,从而解除车厢之间的连接,而目前的摘钩操作通常为人工手动完成。
2、根据检索发现,专利号为cn218641977u的中国专利公开了一种敞车翻车机摘钩执行装置,包括安装板,安装板的顶面固定连接壳体,壳体的正面安装第一电机,且壳体转动设置蜗杆与蜗轮,蜗杆的顶端固定连接套筒,套筒内设置伸缩柱,伸缩柱内螺纹连接丝杆,套筒的一端固定连接第二电机,伸缩柱的一端固定连接连板,连板的正面固定连接框架,框架内安装气缸,气缸的输出端固定连接拉板,通过设置有气缸、夹板、曲杆与框架等部件,当两个夹板处于车钩的脱钩杆上后,通过启动气缸能够拉动拉板从而带动两个夹板相互靠近,两个夹板夹住车钩的脱钩杆,然后通过调节伸缩柱的距离来拉动车钩的脱钩杆,从而实现自动摘钩的目的。
3、针对上述中的相关技术,申请人认为,上述的摘钩执行装置在使用时,虽然可以实现对部分车钩的摘钩操作,但是在摘钩过程中,工作人员在摘火车的车钩时,需要手握脱钩杆的杆柄,之后再逆时针转动火车摘钩杆,使摘钩杆围绕横轴部分来进行转动,横轴部分后续来带动钩锁与车钩脱离从而完成摘钩操作,而上述摘钩执行装置并不便于模仿并实现人工的手握以及后续的旋转动作,从而在实际使用过程中难以流畅的实现对火车车钩的摘钩操作,为此我们提出一种用于翻车机的摘钩机器人及摘钩方法。
技术实现思路
1、为了解决上述问题,本技术提供一种用于翻车机的摘钩机器人及摘钩方法,采用如下的技术方案:
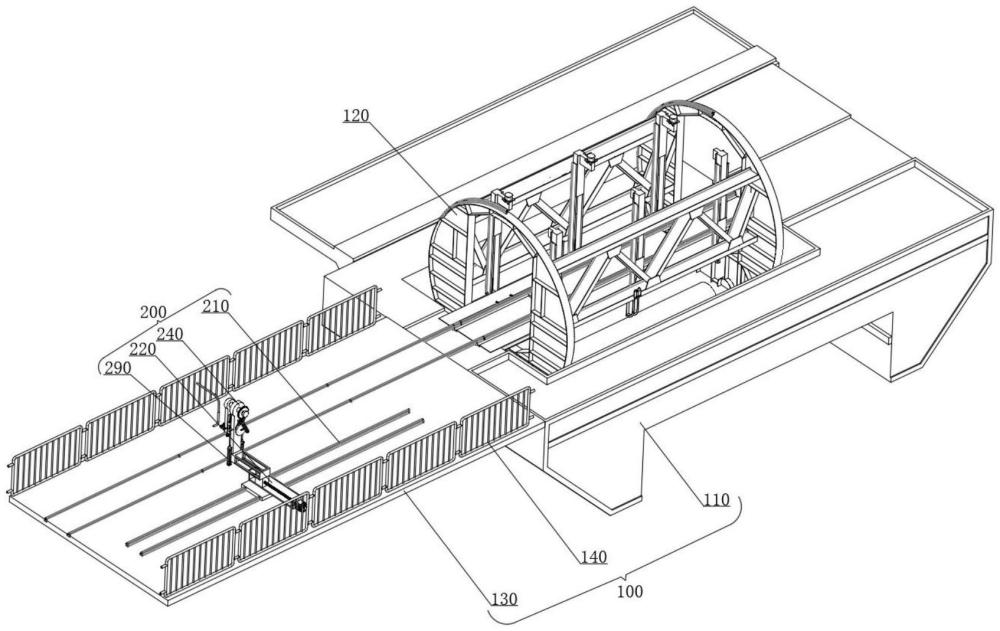
2、一种用于翻车机的摘钩机器人,包括主体模块和摘钩模块,所述主体模块包括主体台,所述主体台的内部设置有翻转机,所述翻转机的前端面固定连接有衔接台,所述衔接台的顶部固定连接有两个护栏,所述摘钩模块包括设置在衔接台顶部的电控滑轨,所述电控滑轨上固定连接有平移组件,所述平移组件的顶部固定连接有支撑台,所述支撑台的内部活动连接有升降板,所述升降板的内部且靠近顶部的位置转动连接有摆动轴,所述摆动轴的一端固定连接有摘钩臂,所述摘钩臂的内壁开设有安装槽,所述安装槽的内部设置有升降组件和握持组件,所述升降组件与握持组件连接,所述摆动轴的另一端设置有摆动组件,所述摆动组件与升降板的一侧连接,所述支撑台的前端面和后端面均固定连接有气缸,两个所述气缸的输出轴分别与升降板的前端面和后端面固定连接。
3、进一步的,所述握持组件包括滑动连接在安装槽内部的h形升降块,所述h形升降块的前端面和后端面均固定连接有中空板,两个所述中空板的内部均滑动连接有活动块,两个所述活动块的一端均固定连接有衔接板,两个所述衔接板相邻的一端均固定连接有握持夹板,两个所述握持夹板相邻的一面均开设有握持槽。
4、通过采用上述技术方案,通过握持槽来实现对摘钩杆的握持。
5、进一步的,所述握持组件还包括活动连接在h形升降块内部的助推杆,所述助推杆的两端均延伸至h形升降块的外部,所述助推杆的一端位于两个握持夹板之间,所述助推杆的另一端铰接有两个衔接臂,两个所述衔接臂的一端分别与两个活动块铰接。
6、通过采用上述技术方案,使得通过助推杆的后退来带动两个活动块相互靠近。
7、进一步的,所述握持组件还包括固定连接在h形升降块一侧和助推杆外表面之间的复位弹簧,所述复位弹簧位于助推杆的外部。
8、通过采用上述技术方案,使得复位弹簧后续可以带动助推杆进行复位。
9、进一步的,所述平移组件包括固定连接在电控滑轨上的中空台,所述中空台内壁的两侧之间转动连接有丝杆,所述丝杆的外表面螺纹连接有平移块,所述支撑台的底部与平移块的顶部固定连接,所述平移块的外表面与中空台的内部滑动连接,所述中空台的一侧固定连接有第一电机,所述第一电机的输出轴与丝杆的一端固定连接。
10、通过采用上述技术方案,使得可以带动握持组件逐渐靠近摘钩杆,并由摘钩杆来抵触助推杆后退。
11、进一步的,所述摆动组件包括固定连接在摆动轴外表面的摆动齿轮,所述升降板的一侧固定连接有第二电机,所述第二电机的输出轴固定连接有传动盘,所述传动盘的一侧开设有条形槽,所述条形槽的内部活动连接有传动轴,所述升降板的一侧转动连接有衔接轴,所述衔接轴的外表面活动套设有套装块,所述套装块的外表面固定连接有半圈齿轮和驱动空板,所述半圈齿轮与摆动齿轮啮合,所述传动轴活动连接在驱动空板的内部。
12、通过采用上述技术方案,使得可以传动摘钩臂进行摆动操作。
13、进一步的,所述摆动组件还包括活动插接在套装块和衔接轴内部之间的螺纹插杆,所述螺纹插杆的外表面螺纹连接有两个螺母,所述条形槽的内部转动连接有调整螺杆,所述调整螺杆的一端延伸至传动盘的外部,所述调整螺杆的外表面与传动轴的内部螺纹连接。
14、通过采用上述技术方案,使得摘钩臂的摆动幅度可以根据需要来进行相应的调整。
15、进一步的,所述升降组件包括两个均转动连接在安装槽内壁顶部和底部之间的升降螺杆,两个所述升降螺杆的底端均延伸至摘钩臂的底部,两个所述升降螺杆的底端均固定连接有衔接齿轮,所述h形升降块的内部与两个升降螺杆的外表面螺纹连接。
16、通过采用上述技术方案,使得握持组件的高度可以根据需要进行调整。
17、进一步的,所述升降组件还包括转动连接在摘钩臂底部的转把,所述转把的外表面固定连接有主动齿轮,两个所述衔接齿轮的外表面均与主动齿轮的外表面啮合。
18、通过采用上述技术方案,通过转动转把可以带动主动齿轮进行转动,从而传动两个升降螺杆转动。
19、一种用于翻车机的摘钩方法,包含以下步骤:
20、s1、准备步骤:将需要进行摘钩的火车牵引至衔接台上,电控滑轨带动平移组件和升降板移动,使得摘钩杆正对助推杆,而打开气缸带动升降板调整高度,从而让摆动轴正对摘钩杆横轴的轴心处;
21、s2、高度调整步骤:通过转动转把可以带动主动齿轮进行旋转,主动齿轮旋转时,将会传动两个衔接齿轮,两个衔接齿轮带动两个升降螺杆进行转动,两个升降螺杆将会带动h形升降块进行升降,从而可以调整握持组件的高度,使得握持组件可以根据需要握持摘钩杆的不同位置;
22、s3、幅度调整步骤:通过拆卸螺母并抽出螺纹插杆,可以将套装块半圈齿轮和驱动空板从衔接轴上拆下,后续通过旋转调整螺杆来调整传动轴的位置,再根据传动轴的位置重新安装回套装块和半圈齿轮,并且摘钩臂依旧保持垂直状态,使得后续传动盘带动传动轴旋转一百八十度时摘钩臂的摆动幅度将会进行改变;
23、s4、摘钩步骤:打开第一电机,第一电机将会驱动丝杆带动平移块进行移动,平移块在移动的同时带动助推杆靠近摘钩杆,后续摘钩杆将会与助推杆接触并推动助推杆后退,助推杆后退时将会拉动复位弹簧伸长并且通过两个衔接臂拉动两个活动块相互靠近,两个活动块带动两个握持夹板进行靠近闭合,而握持槽对摘钩杆进行握持,再打开第二电机驱动传动盘带动握持夹板转动一百八十度,传动轴将会在驱动空板内部活动并带动衔接轴和半圈齿轮进行摆动,使得半圈齿轮传动摆动齿轮带动摆动轴转动,从而使得握持夹板握持摘钩杆并由摘钩臂带动摘钩杆围绕横轴部分来进行转动,从而完成摘钩操作。
24、综上所述,本技术包括以下有益技术效果:
25、(1)本技术通过电控滑轨、气缸、升降板、摆动轴、握持组件和摘钩臂的设置,使得本机器可以模仿工作操作时的步骤,先对摘钩杆进行握持后续再带动摘钩杆围绕横轴部分来进行转动,从而完成摘钩操作,使得更加匹配火车车钩的摘钩操作,使得整体摘钩操作更加流畅;
26、(2)本技术通过套装块、螺纹插杆、调整螺杆和传动轴的设置,使得半圈齿轮和进行拆卸,后续对传动轴的位置进行相应的调整,再将半圈齿轮装回,从而改变摘钩臂后续带动摘钩杆的摆动幅度,进而应对不同摘钩杆的摆动需求;
27、(3)本技术通过升降螺杆、衔接齿轮、转把和主动齿轮的设置,使得本机器可以对握持组件的高度进行调整,从而根据不同摘钩杆的需要来调整握持组件的握持位置,进而提升本机器的适用性。
- 还没有人留言评论。精彩留言会获得点赞!