一种建筑垃圾资源化全方位回收系统的制作方法
本发明涉及建筑垃圾资源化领域,尤其涉及一种建筑垃圾资源化全方位回收系统。
背景技术:
1、“建筑垃圾”指的是建筑施工过程中产生的各种废弃物料,包括废砖、废混凝土、废木材、废金属、废塑料、废玻璃等;这些垃圾主要来源于建筑物的拆除、改建、修缮、装修和新建等过程;随着城市建筑垃圾量的增加,垃圾堆放点也在增加,而垃圾堆放场的面积也在逐渐扩大;垃圾与人争地的现象已到了相当严重的地步,大多数郊区垃圾堆放场多以露天堆放为主,经历长期的日晒雨淋后,垃圾中的有害物质通过垃圾渗滤液渗入土壤中,造成郊区土壤的污染,从而降低了土壤质量。
2、因此,需要对建筑垃圾进行一定的管理和处理,其中,对可回收建筑垃圾资源化处理变慢慢被重视起来;可回收建筑垃圾包括废钢筋、废铁丝、电线电缆等金属废料,以及砖瓦、混凝土等可再次利用的建筑材料;建筑垃圾资源化利用为通过粉碎、筛分等工艺,将建筑垃圾加工成再生骨料、再生砖等产品,用于道路建设、路基填筑等工程。
3、建筑垃圾资源化处理时,需要先将建筑垃圾收集到一处,现有技术多是利用铲斗将建筑垃圾铲起直接运送到资源化处理设备处,或者铲起后借助运输工具运送到资源化处理设备处;但由于建筑垃圾的体积不固定,且形状也不够匀称,和建筑垃圾之间也有相互钩挂粘连的情况,往往需要机械加大马力,同时也容易导致铲斗铲起建筑垃圾过程中,建筑垃圾不易高效进入铲斗内部,导致了建筑垃圾后续资源化处理效率较低的情况;例如现有技术中的中国专利一种建筑垃圾回收设备(授权公告号为cn113441523b)记载有的“收集斗”,在面对建筑垃圾的体积不固定,且形状也不够匀称,和建筑垃圾之间也有相互钩挂粘连的情况时;“收集斗”只是一个敞口结构,也不易将建筑垃圾铲起并导入;基于此,特提出了一种建筑垃圾资源化全方位回收系统,用于解决上述问题。
技术实现思路
1、本发明实施例的目的在于提供一种建筑垃圾资源化全方位回收系统,旨在解决现有技术多是利用铲斗将建筑垃圾铲起直接运送到资源化处理设备处,或者铲起后借助运输工具运送到资源化处理设备处;但由于建筑垃圾的体积不固定,且形状也不够匀称,和建筑垃圾之间也有相互钩挂粘连的情况,往往需要机械加大马力,同时也容易导致铲斗铲起建筑垃圾过程中,建筑垃圾不易高效进入铲斗内部,导致了建筑垃圾后续资源化处理效率较低的情况。
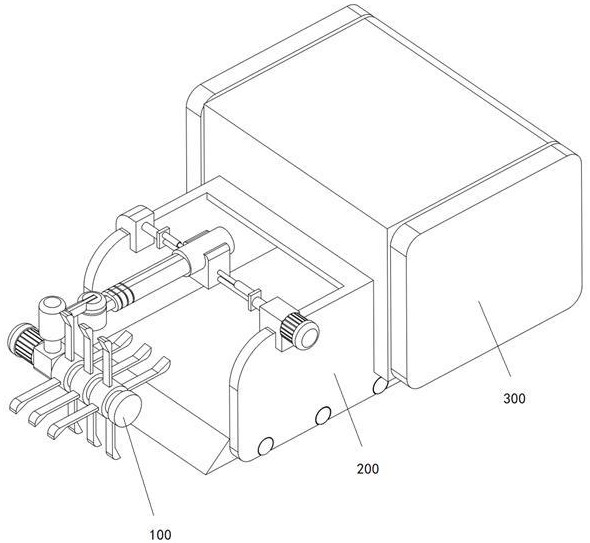
2、具体技术方案:一种建筑垃圾资源化全方位回收系统,包括加装在铲料斗上的拨料架,所述拨料架包括拨料辊和机械臂总成,拨料辊包括伸缩转轴和多个装配在伸缩转轴上的拨料爪,伸缩转轴转动装配在定位块上,定位块加装在机械臂总成上;伸缩转轴装配在驱动电机一的输出轴上;驱动电机一带动伸缩转轴旋转,并因此带动多个拨料爪去向铲料斗拨动建筑垃圾,实现多个拨料爪向后拨料与铲料斗向前前进铲料配合,做到高效集中取料;由于多个拨料爪装配在伸缩转轴上,可通过伸缩转轴调整拨料爪之间的间距,在多个拨料爪向后旋转拨料过程中,去灵活适应体积不同和形状不规则的建筑垃圾;与此同时,在体积过大,或者尺寸不规则,又或者之有相互钩挂粘连造成建筑垃圾不易进入铲料斗的情况时,旋转的多个拨料爪用于去实现破碎体积过大或者尺寸不规则的建筑垃圾,和断开有相互钩挂粘连建筑垃圾;
3、机械臂总成包括前机械臂和后调节架,前机械臂与定位块装配在一起,前机械臂通过其包含有的伸缩臂在y轴方向上调整拨料辊的位置;前机械臂通过其包含有的驱动电机二在x轴和y轴构成的面上进行角度转动调整拨料辊的位置;前机械臂通过其包含有的气压伸缩杆一在z轴方向上调整拨料辊的位置;前机械臂装配在后调节架上,后调节架加装在铲料斗上;后调节架通过其包含有的导轨在x轴方向上调整前机械臂和拨料辊的位置;后调节架通过其包含有的驱动电机三和导轨配合在z轴和y轴构成的面上进行角度转动调整前机械臂和拨料辊的位置;在铲料斗进入到堆放建筑垃圾的区域后,在一些铲料斗无法进入的狭小区域,或者其他一些导致铲料斗无法精准进入铲料区位时,使用伸缩臂在y轴方向上调整拨料辊的位置,使用驱动电机二在x轴和y轴构成的面上进行角度转动调整拨料辊的位置,使用气压伸缩杆一在z轴方向上调整拨料辊的位置,使用导轨在x轴方向上调整拨料辊的位置,使用驱动电机三和导轨配合在z轴和y轴构成的面上进行角度转动调整拨料辊的位置;进而伸缩臂、驱动电机二、气压伸缩杆一、导轨和驱动电机三组合实现灵活调整拨料辊的位置,以便灵活应对一些铲料斗无法进入的狭小区域,或者其他一些导致铲料斗无法精准进入铲料区位;提高拨料辊作业范围,以及建筑垃圾的堆放形式。
4、下面对本技术的技术方案作进一步的说明:
5、在其中一个实施例中,所述铲料斗在其底部安装有多个行走轮,多个行走轮在铲料斗底部呈阵列分布,并用于提高铲料斗移动的机动性。
6、在其中一个实施例中,所述前机械臂还包括固定柱,固定柱固定在伸缩臂上,伸缩臂包括多个相互套设的固定管,固定管内部穿插有气压伸缩杆四,气压伸缩杆四用于调整多个相互套设的固定管的穿插程度,做到调整伸缩臂的长度。
7、进一步的,所述驱动电机二通过固定杆一固定在伸缩臂上,位于驱动电机二的输出轴上固定有旋转盘,旋转盘上固定有固定杆二,固定杆二呈垂直方式固定在气压伸缩杆一上,气压伸缩杆一固定在定位块上。
8、进一步的,所述后调节架还包括两个固定块,导轨安装在两个固定块之间,导轨一端转动装配有旋转轴,另一端转动装配有定位轴,旋转轴固定在驱动电机三的输出轴上;导轨包括两个呈平行分布的连接板,两个连接板之间固定有导向柱,导向柱滑动装配有架设块,位于架设块两侧分别固定有一个气压伸缩杆二,气压伸缩杆二在远离架设块的一端固定在连接板上;固定柱固定在架设块上。
9、在其中一个实施例中,位于所述铲料斗后侧安装有建筑垃圾回收箱,建筑垃圾回收箱内部安装有建筑垃圾回收架;建筑垃圾回收架包括送料旋转架和破碎旋转架,送料旋转架和破碎旋转架之间通过链条箱动力传动连接。
10、进一步的,所述送料旋转架包括旋转支撑柱一,旋转支撑柱一转动装配在建筑垃圾回收箱内部,位于旋转支撑柱一两端分别固定有一个驱动轴一;位于旋转支撑柱一四周固定有多个呈环形阵列分布的送料拨架。
11、再进一步的,所述送料拨架包括两个呈平行分布的立板杆,两个立板杆均固定在旋转支撑柱一上;两个立板杆之间固定有送料拨板。
12、所述送料拨板上固定有多个锤头,多个锤头在送料拨板上呈阵列分布;锤头包括液压缸和固定在液压缸上的敲击块。
13、在面对建筑垃圾的体积有不固定,且形状也不够匀称的情况时,启动旋转支撑柱一回带动其四周固定有的多个送料拨架,去依次拨动建筑垃圾,此过程中,送料拨板利用多个锤头的液压缸,去驱动敲击块在一定程度上敲碎加工建筑垃圾,实现送料拨架精准稳定拨动建筑垃圾,去适应建筑垃圾的体积不固定和形状不匀称的情况。
14、再进一步的,所述送料拨架包括两个呈平行分布的立板杆,两个立板杆均固定在旋转支撑柱一上;两个立板杆之间固定有柔性送料拨网,柔性送料拨网是由多个相互交错连接的铁链组成;柔性送料拨网的柔性收紧度是由其两侧立板杆内部的收卷轴调节。
15、在面对建筑垃圾的体积有不固定,且形状也不够匀称的情况时,启动立板杆内部的收卷轴,对柔性送料拨网进行收卷或者外翻,实现调节柔性送料拨网的柔性收紧度,在旋转支撑柱一转动下,回带动其四周固定有的多个送料拨架,去依次拨动建筑垃圾,并将建筑垃圾精准送入到破碎旋转架;在调节柔性送料拨网的柔性收紧度的条件下可实现灵活应对体积不固定或者形状也不够匀称的建筑垃圾,以便稳定拨动建筑垃圾,提高送料拨架适用范围,以及有利于后续破碎旋转架的回收工作。
16、进一步的,所述破碎旋转架包括旋转支撑柱二,旋转支撑柱二转动装配在建筑垃圾回收箱内部,位于旋转支撑柱二两端的端头处分别设置有一个驱动轴二;位于旋转支撑柱二四周固定有多个呈环形阵列分布的破碎头。
17、再进一步的,所述破碎头包括驱动架,驱动架包括后托板一,后托板一固定有多个气压伸缩杆三,气压伸缩杆三在远离后托板一一端固定在旋转支撑柱二上;后托板一上穿插固定有驱动电机四,位于驱动电机四的输出轴上固定有偏心板,驱动电机四外侧四周的后托板一上固定有多个安全柱。
18、再进一步的,所述破碎头还包括破碎网架,破碎网架包括后托板二,后托板二上开设有盘型腔,偏心板活动放置在盘型腔内部,盘型腔外侧设置有限位环,限位环用于防止偏心板脱落;多个安全柱活动抵靠在后托板二上;后托板二上固定有多个棱柱,棱柱在远离后托板二一端固定有支撑框,位于支撑框内部安装有破碎网,破碎网是由多个相互交错固定的破碎杆组成。
19、在建筑垃圾进入到破碎旋转架下侧,旋转的破碎旋转架会依次使用破碎头对建筑垃圾进行破碎,此过程中,多个气压伸缩杆三会整体推动驱动架和破碎网架向下移动,在破碎网架上的破碎网接触到建筑垃圾,并对建筑垃圾进行破碎后,启动驱动电机四带动偏心板在盘型腔内转动,促使托板二带动破碎网向四周晃动,对建筑垃圾进行高效碾碎;实现破碎网精准稳定破碎,促进建筑垃圾资源化全方位回收;而多个安全柱的设置,可确保驱动架推动破碎网架向下移动。
20、本发明建筑垃圾资源化全方位回收系统,与现有技术相比,具有:
21、驱动电机一带动伸缩转轴旋转,并因此带动多个拨料爪去向铲料斗拨动建筑垃圾,实现多个拨料爪向后拨料与铲料斗向前前进铲料配合,做到高效集中取料;由于多个拨料爪装配在伸缩转轴上,可通过伸缩转轴调整拨料爪之间的间距,在多个拨料爪向后旋转拨料过程中,去灵活适应体积不同和形状不规则的建筑垃圾;与此同时,在体积过大,或者尺寸不规则,又或者之有相互钩挂粘连造成建筑垃圾不易进入铲料斗的情况时,旋转的多个拨料爪用于去实现破碎体积过大或者尺寸不规则的建筑垃圾,和断开有相互钩挂粘连建筑垃圾;
22、使用伸缩臂在y轴方向上调整拨料辊的位置,使用驱动电机二在x轴和y轴构成的面上进行角度转动调整拨料辊的位置,使用气压伸缩杆一在z轴方向上调整拨料辊的位置,使用导轨在x轴方向上调整拨料辊的位置,使用驱动电机三和导轨配合在z轴和y轴构成的面上进行角度转动调整拨料辊的位置;进而伸缩臂、驱动电机二、气压伸缩杆一、导轨和驱动电机三组合实现灵活调整拨料辊的位置,以便灵活应对一些铲料斗无法进入的狭小区域,或者其他一些导致铲料斗无法精准进入铲料区位;提高拨料辊作业范围,以及建筑垃圾的堆放形式;
23、启动旋转支撑柱一回带动其四周固定有的多个送料拨架,去依次拨动建筑垃圾,此过程中,送料拨板利用多个锤头的液压缸,去驱动敲击块在一定程度上敲碎加工建筑垃圾,实现送料拨架精准稳定拨动建筑垃圾,去适应建筑垃圾的体积不固定和形状不匀称的情况;
24、启动立板杆内部的收卷轴,对柔性送料拨网进行收卷或者外翻,实现调节柔性送料拨网的柔性收紧度,在旋转支撑柱一转动下,回带动其四周固定有的多个送料拨架,去依次拨动建筑垃圾,并将建筑垃圾精准送入到破碎旋转架;在调节柔性送料拨网的柔性收紧度的条件下可实现灵活应对体积不固定或者形状也不够匀称的建筑垃圾,以便稳定拨动建筑垃圾,提高送料拨架适用范围,以及有利于后续破碎旋转架的回收工作;
25、在建筑垃圾进入到破碎旋转架下侧,旋转的破碎旋转架会依次使用破碎头对建筑垃圾进行破碎,此过程中,多个气压伸缩杆三会整体推动驱动架和破碎网架向下移动,在破碎网架上的破碎网接触到建筑垃圾,并对建筑垃圾进行破碎后,启动驱动电机四带动偏心板在盘型腔内转动,促使托板二带动破碎网向四周晃动,对建筑垃圾进行高效碾碎;实现破碎网精准稳定破碎,促进建筑垃圾资源化全方位回收;而多个安全柱的设置,可确保驱动架推动破碎网架向下移动。
- 还没有人留言评论。精彩留言会获得点赞!